

Ijraset Journal For Research in Applied Science and Engineering Technology
A Model Design in UAV Technology: A Multi-controller-based Wi-Fi Imaging Drone
Authors: Soham Chatterjee, Sanjita Moyra, Abhijit Banerjee
DOI Link: https://doi.org/10.22214/ijraset.2023.55959
Certificate: View Certificate
Abstract
A noticeable advancement in the concept of “Unmanned Airborne Vehicle” (UAV) has been manifested with the advancement of the controller technology. Many critical Earth terrains and a few destinations required to be imaged. This challenge can be overcome by developing the imaging aviators. The modern technology is focusing on the flight controller systems for the purpose-driven work. Although there are some iconic developments in the flight automation system but yet there is a need of simplified flight controller with the support systems. The present work aims to develop a prototype of a Wi-Fi based imaging drone based on multicontroller processing system. A few concepts of earlier model designs on UAV technology are thoroughly studied and the scope of linking new modules for the enhanced precision in flight control are utilised in this work. Finally, this work has resulted into an open source editable “all-in-one” platform with a model algorithm that fits into the future designs along with the compatible supplementary hardware.
Introduction
I. INTRODUCTION
The oldest operation using UAV`s for warcraft is dated back from July 1849 [1]. Forces of the Austrian military attempted the launch of 200 armed balloons from the land carrying approximately 13 kilograms more or less with a time fuse that was to be dropped over the targeted city [2-3]. Some were also launched from the ship SMS Vulcano. Unmanned aircrafts built during World War I which can be operated remotely which was a contribution of A.M. Low’s expertise in early television and radio technology was used against the Zeppelins, the successor of British UAV`s in 1917 and 1918 [4-5]. Geoffrey de Havilland`s monoplane was the one that flew under control on March 21st 1917 [6]. A.M. Low known as “father of radio guidance systems” contributed to this effort and was later inducted into the international space hall of fame [7].
Not much later, on September 12th, the Hewitt-Sperry`s Automatic Airplane demonstrated the concept of unmanned aircraft intended for use of aerial torpedoes similar to that of cruise missiles of today. It was controlled by using gyroscope developed by Elmer Sperry of the Sperry Gyroscope Company [8]. In the year 2012 the U.S. Air Force deployed 7,494 modernized UAV`s [9]. By 2013 at least 50 countries developed UAV`s among which China, Israel, Iran and Türkiye designed their own variety. As of 2021, quadcopters instantiated the widespread popularity of hobby radio-operated aircraft and toys, however due to lack of autonomy and by new regulatory environments which require line of sight with the pilot the use of UAV`s in commercial and general aviation is still not achieved. At present no comprehensive list of systems exists, after wide proliferation of UAV technology [10].
UAV, Multirotor or Drone maybe a solution for most of the outweighed problems but it is kept limited or not been much worked on as it was also a complex system to be dealt with. The very usefulness and the miracles it can perform are always tinkling our very interest. This airborne system at its beginning stages utilizes the fundamentals and then become a unique system by advancing at each of its modular units. Advancements are done on individual modular units like Communication, Inertial Measurement Unit, Digital Motion Processors, Flight Controller and Camera and also on hardware specifications and intelligent firmware that’s running in the different cores [11].
In the preliminary stages of the development QuardX UAV Model-1 was built on October 03, 2023 without camera and other hardware accessories. Thereafter at testing it was found that the coded proportional integral differential section (PID) shows some errors in gain control and feedback mechanism. Moreover, the receiver module and the android application were lagging due to excessive processing of the instructions.
In the present work, the basics of a quadcopter are studied that includes operating methods of flight controller unit, transmitter and receiver for image and instruction along with the development of an android application and circuit design. An open-source quadcopter program modularity to overcome the dependencies on a particular set of tools and tactics are carried out in this work. This design has the potential to function with any module independently in such a way that if that module is substituted by an external supplement and may hardly affect the design internally. This study also breaks individual modules into functional units so that the design remains unified in terms of the functionalities and with the improved concurrency the efficiency of the particular unit to work independently increases.
II. METHODOLOGY
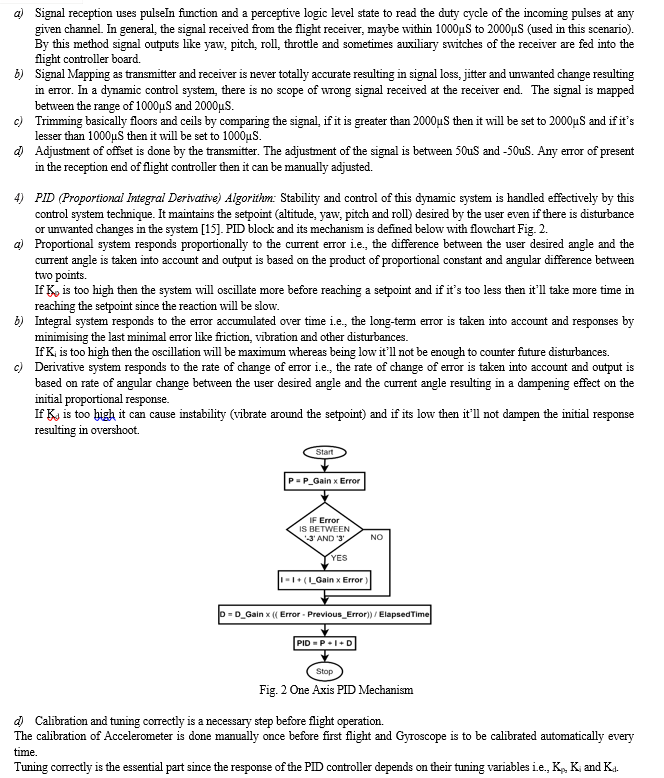
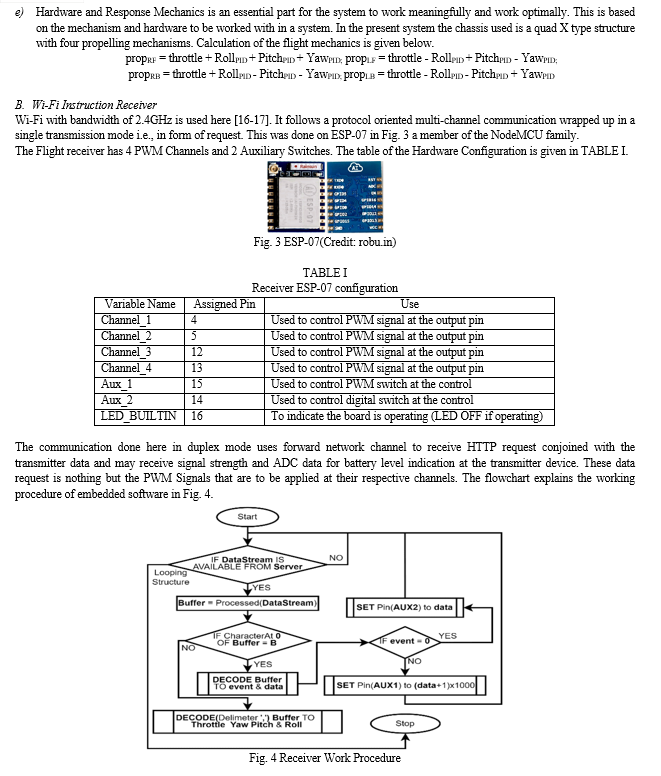
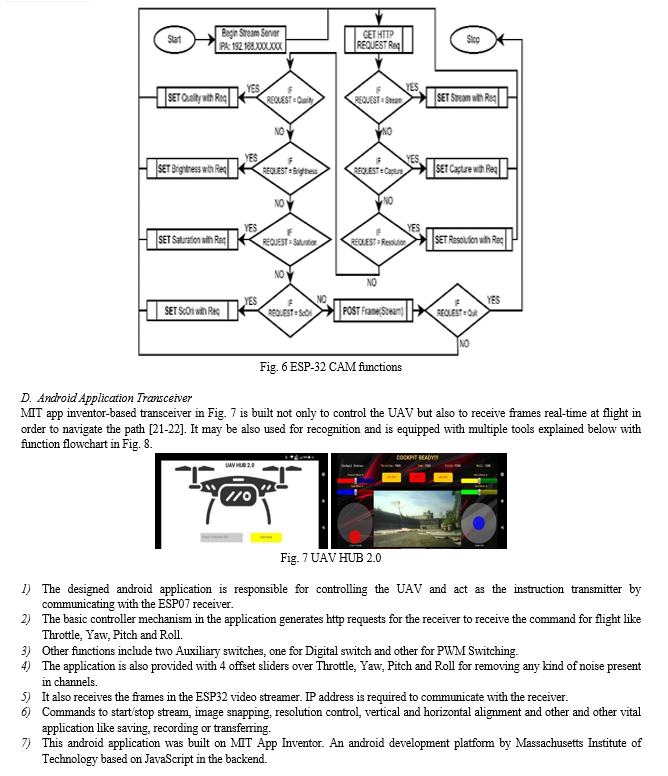
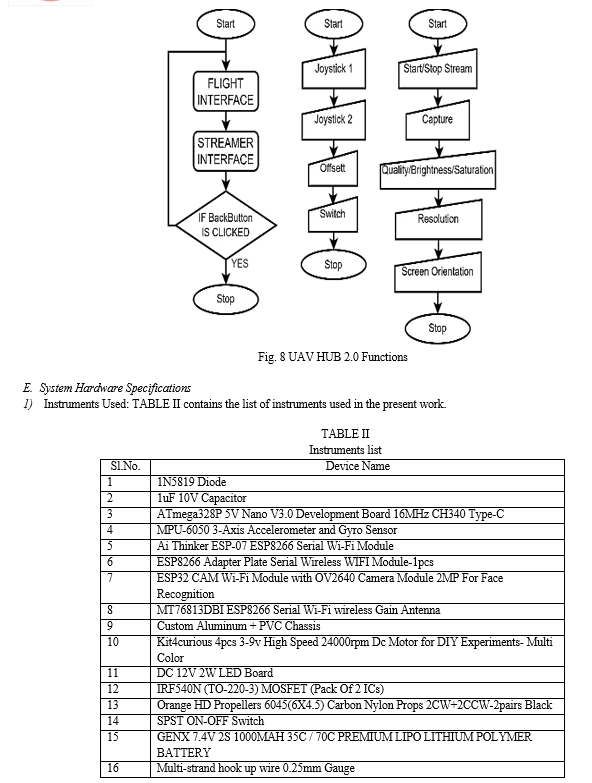
A. Flight Controller




IV. ACKNOWLEDGEMENT
The open-source embedded processors and integrated development environment (IDE) of Arduino, Esspresif, MIT (Application Development Environment) and EasyEDA tools and others organisation are used due course of this work for which we are highly thankful. Special thanks to New Alipore College, University of Calcutta for providing laboratory support during the development of work.
Conclusion
Crucial turning points in the development of drones have come when innovations in microelectronics have enabled innovations in physical movement. This is true of the accelerometer and gyroscope data that make it possible for quad copters to maintain stability, and of GPS devices that allow drones to navigate from one point in space to another. Many of the cargo initiatives plan on such an aircraft that can fly vertically and horizontally so a technically tricky problem to solve hence arises. This is the necessary hump to be overcome if delivery drones are to prove economically viable. Pure quadcopters lack the needed range and endurance; fixed-wing aircraft that can carry a substantial payload need too much space to take off and land. But if delivery drones succeed, they will likely far outnumber all the other uses of drones put together. Drones as observers in the sky will remain important for the indefinite future. They will grow easier to operate. The ease of flying and taking pictures of drones will mask the constraints of tough with higher sensor resolutions, better lenses, cheaper memory counterparts and the greater precision. One of the ideas of this work is to break the system into their fundamental parts in such a way that one can get a detailed study with all pros and cons associated with each unit. This, in turn, will enrich the idea of advancement of open-source work. This work establishes an ease of the reconfiguring dismantle modules along with much-varied library to some extent as a learning model for the future research. However vast scope of future advancement of this work can be recognized by improving in the data reception and extending the boundary limitation of the latitude and longitude and improving the resolution in the data observation part.
References
[1] John Buckley, “Air Power in the Age of Total War”. [2] Justin D. Murphy, “Military Aircraft, Origins to 1918: An Illustrated History of Their Impact”, pp. 9-10. [3] F. Stansbury Haydon, “Military Ballooning During the Early Civil War”, The Johns Hopkins University Press, pp. 18-20. [4] Ursula Bloom, “He Lit The Lamp”, 1958 A Biography Of Professor A.M. Low. [5] Steve Mills, “The Dawn of the Drone”, 2019 Casemate Publishers. [6] Professor A. M. Low FLIGHT, \"The First Guided Missile\", 3 October 1952 pp. 436. [7] Taylor, John W. R., “Jane\'s Pocket Book of Remotely Piloted Vehicles”. [8] Pearson. Lee, “Developing the Flying Bomb”. [9] Ackerman, Spencer; Shachtman, Noah (9 January 2012). \"Almost 1 in 3 U.S. Warplanes Is a Robot\". [10] Sayler. K (2015), “A WORLD OF PROLIFERATED DRONES: A Technology Primer”. [11] Kangunde, V., Jamisola, R.S. and Theophilus, E.K., \"A review on drones controlled in real-time\", Int. J. Dynam. Control 9, 1832–1846 (2021). [12] Huang Jian, “Design of Angle Detection System Based on MPU6050”, Proceedings of the 7th International Conference on Education, Management, Information and Computer Science (ICEMC 2017), DOI- 10.2991/icemc-17.2017.2 [13] D.S. Fedorov, A.Y. Ivoylov et al “Using of Measuring System MPU6050 for the Determination of the Angular Velocities and Linear Accelerations”, Automatics and Software Enginery. 2015, No. 1 (11). [14] D. Hazry, M. Sofian and A. Zul Azfar, “Study of Inertial Measurement Unit Sensor”, Proceedings of the International Conference on Man-Machine Systems (ICoMMS), 11 – 13 October 2009, Batu Ferringhi, Penang, MALAYSIA. [15] Salih, Atheer et al, \"Flight PID Controller Design for a UAV Quadrotor\"(2010), Scientific Research and Essays. 5, p.p. 3660-3667 [16] Guillen-Perez, Antonio et al, \"WiFi networks on drones\"(2016). 183 - 190. 10.1109/ITU-WT.2016.7805730. [17] Rémy Grünblatt, \"From WiFi performance evaluation to controlled mobility in drone networks\" Networking and Internet Architecture [cs.NI]. Université de Lyon, 2021. [18] Allafi and T. Iqbal, \"Design and implementation of a low-cost web server using ESP32 for real-time photovoltaic system monitoring,\" 2017 IEEE Electrical Power and Energy Conference (EPEC), Saskatoon, SK, Canada, 2017, pp. 1-5, doi:10.1109/EPEC.2017.8286184. [19] P. Rai and M. Rehman, \"ESP32 Based Smart Surveillance System,\" 2019 2nd International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 2019, pp. 1-3, doi: 10.1109/ICOMET.2019.8673463. [20] Hemanth Kumar M S, “ESP32-CAM for Face Mask Detection”, International Journal of Advanced Research in Science, Communication and Technology (IJARSCT), Volume 2, Issue 1, February 2022. [21] J. Patoliya, H. Mehta and H. Patel, \"Arduino controlled war field spy robot using night vision wireless camera and Android application,\" 2015 5th Nirma University International Conference on Engineering (NUiCONE), Ahmedabad, India, 2015, pp. 1-5, doi: 10.1109/NUICONE.2015.7449624. [22] Yasenjiang. Aimaiti, Khalid Munawar and Ubaid M. Al-Saggaf, “Android Based Control Software for Small Unmanned Aerial Vehicles”, International Journal of Engineering Research & Technology (IJERT), ISSN: 2278-0181, Vol. 3 Issue 4, April – 2014.
Copyright
Copyright © 2023 Soham Chatterjee, Sanjita Moyra, Abhijit Banerjee. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET55959
Publish Date : 2023-09-30
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online