

Ijraset Journal For Research in Applied Science and Engineering Technology
A Review Paper on Paint Spraying Robot
Authors: Kaveri Arote, Sakshi Jopale , Gauri Kashmire, Pankaj Nawale
DOI Link: https://doi.org/10.22214/ijraset.2024.60716
Certificate: View Certificate
Abstract
Painting interior walls is a frequent construction task that takes a lot of time and work. Robotic painting was introduced to replace human manual activity, improving accuracy, efficiency, and lowering costs. In this study, We present an independent robot that paints walls. robot that uses a cascade lift mechanism to enable it to use a paint sprayer to paint a room\'s interior walls. The paint sprayer can reach the necessary heights With the assistance of of this mechanism for cascading lifts mechanism. With two degrees of freedom (DOF), The robot moves fluidly in each of the six directions. thanks to the DC powered mecanum wheels mounted down to its foundation. Ultrasonic sensors are used by the robot to measure distance, make adjustments to the walls, and determine if the mister has reached the wall\'s summit. The robot\'s mecanum wheels, ultrasonic sensors, and other components are all managed by the master controller. The AC power supply powers the entire system Color is sprayed on to manage the amount of color; sprayers are employed for this purpose. Sprayers need to split liquid into droplets that are the right size, distribute them evenly across the surface, and manage the volume of liquid to prevent overapplication. One major issue that affects workers everywhere is disease control.
Introduction
I. INTRODUCTION
Spray painting is frequently a crucial step in the manufacturing process in the industrial sector. The precision and ease of painting have a direct impact on the finished product's perceived quality, particularly in the automotive sector. Manual spray painting is frequently employed for complicated goods or manufacture in small batches However, industrial robots often carry out the painting in highly automated large- scale production. The process of creating robot trajectories for usage in industrial paint booths has to be streamlined and improved. A unique spray paint optimization approach is proposed to make a generated starting trajectory as well as reduce the richness of the paint variances from the desired thickness. An interior point solver is used to solve a ongoing non-linear optimization issue to determine the smoothed trajectory A two-dimensional reference function for the paint thickness that has been applied is chosen by utilizing experimental data to fit a spline function Next, The footprint profile of this applicator is projected into the geometric to construct the model for paint deposition. Following a starting path segment the location and length of every trajectory section are employed as variables for optimization.
The optimization's principal objective is to create An applicator for paint trajectory that, given subsequently, could nearly precisely correspond to a target paint thickness. Two different cases have shown the algorithm's capacity to yield satisfactory outcomes, such as a basic two-dimensional test example and a sophisticated commercial instance requiring the painting the fender of a tractor The project aims to design well- functioning robot paths for automated booths for spray painting When employing robotic spray painting to apply an even coat of paint to a surface at a predefined thickness, the technique described here can be used.
II. PROBLEM STATEMENT
Painting is frequently labour - intensive, repetitive task that takes a lot of time and costs money. worker exposure to toxic substances as well. In addition to the fact that robots used for manual painting and paint spraying mostly rely on human accuracy, automated spraying.
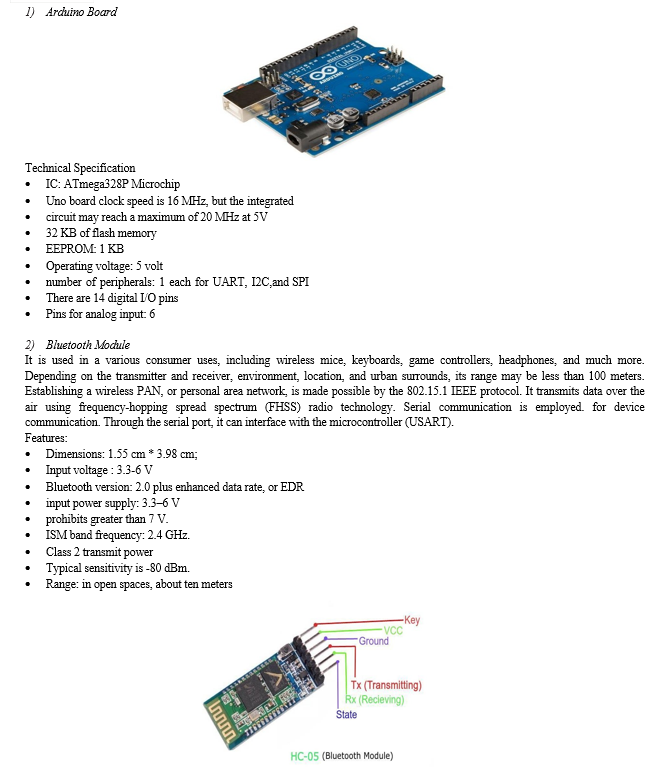
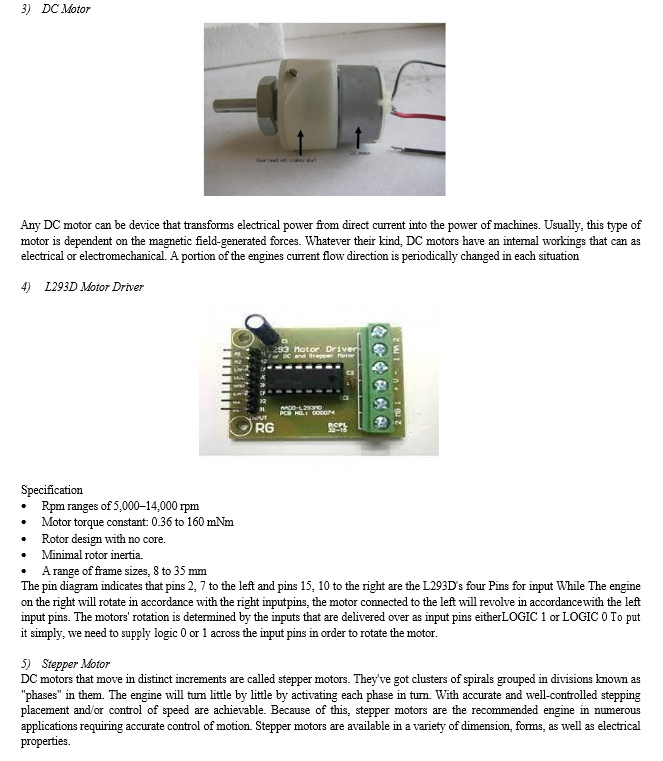
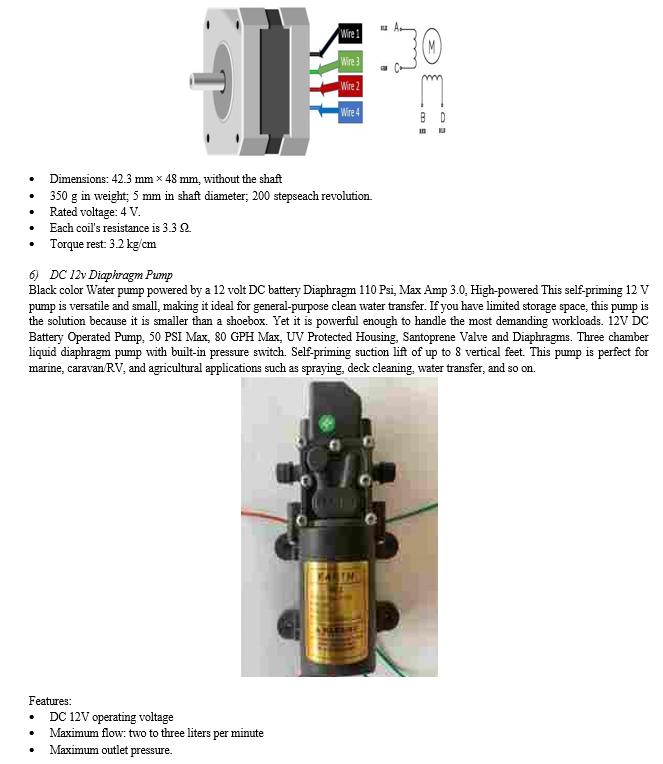
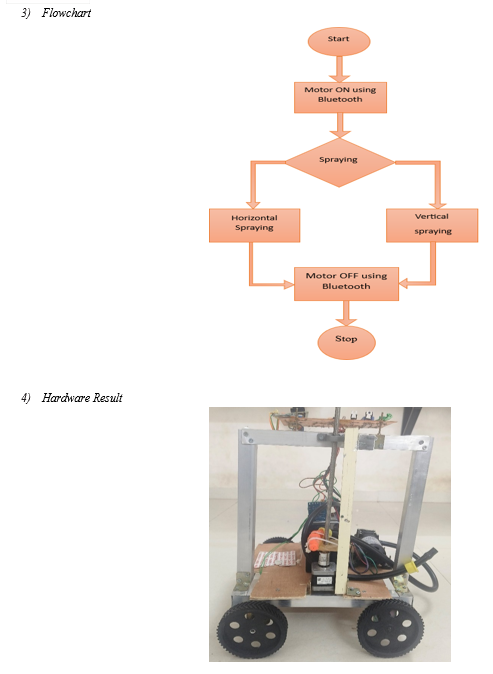
III. SYSTEM HARDWARE

V. ACKNOWLEDGEMENT
We are grateful to a number of people who have supported our effort; without their assistance, it would not have been feasible. First and foremost, we would like to express our gratitude to Mr. Pankaj A. Nawale, our project guide, for his consistent and prompt assistance and direction during our preparation. We appreciate each and every project coordinator for their invaluable contributions to our endeavor.
Conclusion
Robots that spray paint offer a revolutionary technology with major benefits for the building and remodeling sectors. When it comes to painting walls, these robots are more productive, accurate, and consistent, which results in shorter project durations and better paint utilization. Their capacity to navigate challenging terrain and safely navigate dangerous situations improves worker safety on construction sites. These robots are a favorite option for interior design because of their possible connection with smart buildings and residences, which will provide consumers with flexibility and ease.
References
[1] Ramabhadran, R., Antonio, J. K., and Ling, T. L. \"A framework for optimal trajectory planning for automated spray coating.\" 12 (1997): 124–134 in International Journal of Robotics and automation [2] Hitoshi Tokunaga et al. \"A Method to Solve Inverse Kinematics Problems Using Lie Algebra and its Application to Robot Spray Painting Simulation.\" Computers and Information in Engineering Conference and ASME 2004 International Design Engineering Technical Conferences. Society of Mechanical Engineers in America, 2004. [3] Suh, S-H., Woo, I-K., and Noh, S-K. \"Development of an automatic trajectory planning system (ATPS) for spray painting robots.\" Automation and Robotics, 1991. IEEE International Conference on Proceedings, IEEE, 1991. [4] [4]A study was conducted by Asakawa, Naoki, and Yoshimi Takeuchi titled \"Teachingless spray-painting of sculptured surface by an industrial robot.\" Automation and Robotics, 1997. Proceedings, 1997 IEEE, 1997; IEEE International Conference on, Vol. 3. [5] Ar?kan, Tuna Balkan, and MA Sahir. \"Process modeling, simulation, and paint thickness measurement for robotic spray painting.\" Robotic Systems Journal 17 (2000): 479–494. [6] Ming Zhang. \"Brief Introduction of Film Thickness Control During Paint Spraying by Robot.\" YU TUZHUANG XIANDAI TULIAO 6.60 (2006): 3 [7] Chen, Heping, and colleagues, \"Automated robot trajectory planning for spray painting of free-form surfaces in automotive manufacturing.\" Automation and Robotics, 2002. Process. IEEE, 2002; ICRA\'02: IEEE International Conference on. Vol. 1.
Copyright
Copyright © 2024 Kaveri Arote, Sakshi Jopale , Gauri Kashmire, Pankaj Nawale. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET60716
Publish Date : 2024-04-21
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online