

Ijraset Journal For Research in Applied Science and Engineering Technology
Advancements in Bicycle Safety: Integrating Control Sensors and Artificial Intelligence for Enhanced Airbag Innovation
Authors: Shivam Rupnawar, Puja Deokate, Mohit Bhandari
DOI Link: https://doi.org/10.22214/ijraset.2024.61181
Certificate: View Certificate
Abstract
Motorcycle safety is a critical concern in traffic systems worldwide. This paper introduces a novel approach to enhancing rider safety through the integration of airless tires and advanced airbag systems, underpinned by artificial intelligence (AI) and control sensors. Airless tires contribute to vehicle stability by eliminating the risk of sudden deflation, while AI-driven airbag systems promise dynamic protection for riders during collisions. The study begins with an analysis of airless tire technology, emphasizing its impact on motorcycle stability and safety. It then transitions to the development of motorcycle-specific airbag systems, which utilize AI to process sensor data and make real-time decisions regarding airbag deployment. The effectiveness of these systems is validated through crash simulation tests and impact force measurements, demonstrating a substantial reduction in injury severity. Challenges such as cost, user acceptance, and technical constraints are thoroughly examined. The paper concludes with a discussion on future trends, including the potential for AI to predict and prevent accidents before they occur, thereby setting a new standard for motorcycle safety.
Introduction
I. INTRODUCTION
.The air that is still contained in the tire is one of the factors that greatly affect the occurrence of loss of control. Based on research at Honda, if the air pressure in the tire has decreased by only 0.3 kg/cm2, then the stability of the motor will decrease by 10%. This situation is often experienced by new riders who still do not understand the characteristics of tire pressure changes. With easy and fuelefficient maintenance, airless tires will greatly assist the rider. Because there are no tires that will leak air and the tire has high bending properties with road conditions, airless tires will increase vehicle stability and safety. High bending properties are obtained from the elastic modulus that is smaller than conventional tires. With the airless tire and small motor dimensions due to the use of electric energy from the airless tire compressor, we will make a two-wheel vehicle to assist people with the same functionality as a single-wheel vehicle, the wheelchair. Airbag system has been widely used in automotive in order to reduce injuries during a crash and save human lives. But for two-wheeled vehicles, this system is rarely used. It's because in motorcycles, when accidents happen, people tend to be thrown from their vehicle and experience several contacts before a really serious impact occurs. The first contact is the motor with the ground or another object, the second is the rider with the motor or ground, and the serious impact is when the rider hits a hard/stiff object such as another vehicle or a wall, etc. Based on the data from NHTSA on traffic accidents involving motorcycles, more than 22% of accidents occur only because of a mild collision avoidance or when sliding due to road conditions. In addition, the rider's physical condition also affects whether an accident will occur or not. More than 90% of accidents that occur only involve one rider and are often caused by a loss of vehicle control. Then, more than 50% of motorcycle accidents occurred with a time of use under 6 months and 33% with a time of use under 6 years. Background In riding a motorcycle, the accident is something that can't be predicted and avoided, because we can't guess the driver of other vehicle mistake. The lack of safety facilities in a motorcycle is also one of the supporting factors of the high-rate motorcycle accident. And if we are looking for the other side about the increase of the number of sales and usage of high cc motorcycle; it's also increased the excitement for world class motorcycle racing fans today. All of these things inspired us to do some innovations that can support the driving safety of a motorcycle, especially in the purpose for reducing the number of motorcycle accidents. So, we decided to temporarily stop our plan for joining in world class motorcycle racing, and we are concentrating our team to make a breakthrough innovation to reach a motorcycle driving safety.
Background is all matter about the driving territory of motorcycle at this time. The motorcycle driving territory at this time always increases in both positive and negative meaning. The positive meaning is the increasing of requirements from people around the world about the motorcycle usage as an economical transportation mode and also about the race of motorcycle in world level with higher cc. It's proven with many motorcycle exhibitions around the world and motorcycle racing with Moto GP level which is followed by many countries, and also with the increasing sales of high cc motorcycle. But, increasing of motorcycle usage around the world is also followed by the increasing of accidents that involve motorcycle with other vehicle, with the number of percentages reaches 75% from the total motorcycle users, and this is the negative meaning. Objective The primary objective of this research is to explore the potential of airless tires and airbag systems in improving motorcycle safety. By analysing the technological advancements, benefits, challenges, and future prospects of these innovations, this paper aims to provide insights into their effectiveness in enhancing vehicle stability, protecting riders, and preventing accidents. Scope This paper will investigate the following key aspects: The technology behind airless tires, including their design, materials, and impact on vehicle stability. The development and implementation of airbag systems in motorcycle safety gear, including their design, functionality, and effectiveness. The benefits of airless tires and airbag systems in reducing injuries and fatalities in motorcycle accidents. The challenges and limitations associated with the adoption and integration of these technologies into existing motorcycle designs. The future trends and potential innovations in motorcycle safety technology, including advancements in sensor technology, artificial intelligence, and smart vehicle systems. By examining these aspects, this research aims to provide a comprehensive understanding of the role of airless tires and airbag systems in improving motorcycle safety and reducing the risk of accidents.
II. AIRLESS TIRES: REVOLUTIONIZING MOTORCYCLE STABILITY
Technology and Design Airless tires, also known as non-pneumatic tires or NPTs, represent a radical departure from traditional pneumatic tires by eliminating the need for air pressure. Instead of relying on air to support the vehicle’s weight and absorb shocks, airless tress utilizes innovative materials and structures to provide similar performance characteristics without the risk of air leakage. One of the key features of airless tires is their unique design, which typically consists of a series of flexible spokes or a solid lattice structure that supports the weight of the vehicle. These structures are made from resilient materials such as rubber, thermoplastic elastomers, or composite materials, which offer both flexibility and durability. Unlike conventional tires, which rely on air pressure to maintain their shape and provide cushioning, airless tires distribute the vehicle’s weight evenly across their surface, minimizing the risk of uneven wear and punctures. In addition to their structural design, airless tires often incorporate advanced materials and manufacturing techniques to enhance their performance characteristics. For example, some airless tires feature specially formulated rubber compounds that provide superior grip and traction in various road conditions. Others may incorporate lightweight materials such as carbon fibre or Kevlar to reduce weight and improve fuel efficiency. Overall, the technology and design of airless tires represent a significant departure from conventional tire designs, offering enhanced durability, stability, and safety for motorcycle riders.Impact on Vehicle Stability One of the primary benefits of airless tires is their ability to enhance vehicle stability and handling, particularly in challenging road conditions. By eliminating the risk of air leakage and maintaining consistent tire pressure, airless tires provide a more stable and predictable riding experience for motorcyclists. Traditional pneumatic tires are susceptible to fluctuations in air pressure, which can affect their performance and handling characteristics. Even minor changes in tire pressure can lead to reduced traction, increased rolling resistance, and decreased stability, particularly at high speeds or during sudden manoeuvres. In contrast, airless tires maintain their shape and performance characteristics regardless of changes in external conditions, providing a more consistent and reliable riding experience. The enhanced stability provided by airless tires can be especially beneficial for new riders who may lack experience or confidence in controlling their motorcycle. By reducing the risk of skidding, sliding, or loss of control, airless tires can help novice riders feel more comfortable and secure on the road, ultimately improving overall safety. Additionally, the improved stability and handling offered by airless tires can enhance the performance of motorcycles in off-road or rough terrain environments. Traditional pneumatic tires are vulnerable to punctures and damage from rocks, debris, and other obstacles, which can compromise their performance and safety. Airless tires, with their durable construction and puncture-resistant design, offer a more robust solution for riders who venture off the beaten path. Durability and Maintenance Another key advantage of airless tires is their enhanced durability and reduced maintenance requirements compared to conventional pneumatic tires. Traditional tires are prone to punctures, flats, and blowouts, which can result in costly repairs and downtime for riders. In contrast, airless tires are designed to withstand the rigors of everyday riding without the risk of punctures or leaks. The solid or semi-solid construction of airless tires eliminates the need for regular inflation checks and pressure adjustments, simplifying maintenance and reducing the risk of tire-related issues on the road.
Additionally, the absence of an inner tube or air chamber reduces the risk of pinch flats and blowouts, further enhancing the reliability and longevity of airless tires. While airless tires offer significant advantages in terms of durability and maintenance, they are not without their drawbacks.
The solid or semi-solid construction of airless tires can result in a stiffer ride compared to traditional pneumatic tires, which may be less comfortable for some riders, particularly over long distances or rough terrain. Additionally, airless tires may be more expensive to manufacture and replace than conventional tires, which could pose a barrier to widespread adoption.
III. AIRBAG SYSTEMS: ENHANCING RIDER SAFETY
Development of Motorcycle-Specific Airbag Systems The adaptation of airbag technology for motorcycle safety gear has been a significant area of innovation in recent years. Recognizing the unique challenges faced by motorcycle riders, several manufacturers have developed specialized airbag systems designed to provide protection in the event of a crash. These motorcycle-specific airbag systems typically consist of a wearable vest or jacket equipped with integrated airbag modules. Unlike automotive airbag systems, which are built into the vehicle’s structure, motorcycle airbag systems are designed to be worn by the rider, providing personal protection in the event of a crash. Deployment Mechanisms and Sensors The deployment mechanism of motorcycle airbag systems varies depending on the design and manufacturer. Some systems utilize tethered or wireless sensors that detect sudden deceleration indicative of a crash and trigger the inflation of the airbag modules. Others incorporate accelerometers and gyroscopes to detect changes in rider orientation and activate the airbags accordingly. These sensors are strategically positioned within the motorcycle gear to accurately detect crashes and initiate the deployment sequence. In addition to detecting impacts, some systems also monitor rider movement and position to ensure optimal deployment timing and trajectory. Types of Motorcycle Airbag Systems There are several types of motorcycle airbag systems available on the market, each offering varying levels of protection and coverage. Frontal airbag systems are the most common and typically inflate to protect the rider’s chest, abdomen, and spine in the event of a frontal collision. In addition to frontal airbags, some motorcycle airbag systems also feature side airbag modules that provide protection in the event of lateral impacts or slides. These side airbags inflate rapidly upon detection of a crash, providing additional protection for the rider’s torso and vital organs. Effectiveness and Benefits Studies have shown that motorcycle airbag systems can significantly reduce the severity of injuries in the event of a crash. Research conducted by the Motorcycle Accident In-Depth Study (MAIDS) found that riders equipped with airbag vests or jackets were less likely to suffer severe injuries to the chest, abdomen, and spine compared to those without airbag protection. In addition to reducing injury severity, motorcycle airbag systems can also help prevent secondary injuries caused by impacts with the ground or other objects. By providing a cushion of protection around the rider’s body, airbag systems can help absorb and distribute impact forces, reducing the risk of fractures, internal injuries, and abrasions
IV. BENEFITS OF AIRBAG SYSTEMS IN BIKE SAFETY
A. Reduction of Impact Forces
One of the primary benefits of airbag systems in motorcycle safety is their ability to reduce the impact forces experienced by riders during a crash. In traditional motorcycle accidents, riders are often thrown from their bikes and can experience significant impacts with the ground or other objects. Airbag systems provide an additional layer of protection by deploying inflatable cushions that absorb and distribute these impact forces, thereby reducing the risk of serious injury. Studies have shown that airbag systems can significantly decrease the severity of injuries sustained by motorcycle riders. By cushioning the rider’s body and dissipating energy over a larger surface area, airbags help mitigate the effects of sudden deceleration and blunt force trauma associated with crashes. This can lead to fewer fractures, internal injuries, and abrasions, resulting in improved overall outcomes for riders involved in accidents.
B. Protection of Vital Body Parts
Another important benefit of airbag systems is their ability to protect vital body parts during a crash. In motorcycle accidents, the chest, abdomen, and spine are particularly vulnerable to injury due to the high forces involved. Airbag systems are designed to specifically target these areas, deploying inflatable cushions that provide protection against impacts and blunt force trauma. Frontal airbag systems, for example, are positioned to inflate in front of the rider’s torso, creating a protective barrier between the rider and any objects or surfaces they may come into contact with during a crash. Side airbag modules provide additional protection for the torso and vital organs, further reducing the risk of injury in the event of a lateral impact or slide.
By safeguarding these critical body parts, airbag systems help minimize the risk of serious injury and improve the chances of survival for riders involved in motorcycle accidents. This can have significant implications for long-term health outcomes and quality of life for individuals affected by crashes.
C. Prevention of Fatal Injuries
Perhaps the most significant benefit of airbag systems in motorcycle safety is their potential to prevent fatal injuries. Motorcycle accidents are a leading cause of death and serious injury worldwide, with riders facing a disproportionately high risk of fatality compared to occupants of enclosed vehicles. Airbag systems offer a promising solution to this problem by providing an additional layer of protection that can help prevent fatal injuries in the event of a crash. Studies have shown that airbag systems can significantly reduce the risk of death and serious injury for motorcycle riders involved in accidents. By cushioning the rider’s body and reducing the severity of impact forces, airbags help mitigate the most lifethreatening aspects of crashes, such as blunt force trauma to the head, chest, and abdomen. This can mean the difference between life and death for riders involved in high-speed collisions or other severe accidents. Overall, the benefits of airbag systems in motorcycle safety are clear. By reducing impact forces, protecting vital body parts, and preventing fatal injuries, airbags offer a valuable tool for improving rider safety and reducing the risk of death and serious injury in motorcycle accidents.
D. Simulation Model
Data collection is accomplished solely by means of simulation as it offers the opportunity to cheaply evaluate and measure various operational driving and collision scenarios. In addition, the motorcycle concept currently only exists virtually, and real-world driving and crash tests are costly and pose great challenges to represent targeted scenarios. The simulation model is implemented in Siemens Simcenter’s Madymo (version MADYMO 2020.1), which serves as a multibody (MB) finite-element (FE) crash-simulation environment. Madymo is a simulation environment for physical systems with a focus on vehicle collision dynamics and passenger safety and injury assessment. It combines MB system capabilities for large rigid body motions as well as FE analysis for structural behaviour. Here, simulating crash dynamics not only saves costs but can also serve to reduce time to market significantly
V. MOTORCYCLE MODEL AND ACCIDENT OPPONENT
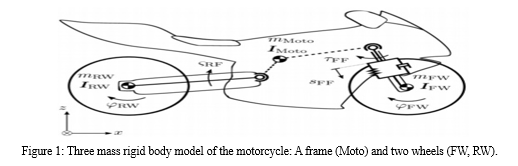
The motorcycle is modelled with three masses, see Fig. 1, defined by their mass m, rotational inertia I, and geometry. The bodies are linked via kinematic joints. The motorcycle chassis is attached to the suspended front fork (FF) and rear swing (RS). The telescopic front fork translates linearly (ςFF), whereas the rear swing rotates angularly (ςFF). Both suspensions attach to their wheels (FW, RW) via hubs, around which these rotate (φFW, φFW). To model structural deformation in an impact, the front fork allows for angular deformation ςFF. It depicts a rotation of the front fork inwards around the steering hub. As an impact opponent vehicle, the simulation setup comprises a collision partner, which is represented by a 1987 Ford Scorpio configured according to [16]. The model is part of a broader modelling and simulation strategy ranging from a multibody-system ([26]), a coupled multibody- and finite-element setup ([25, 27]), to a full finite element model ([23]). The multibody model used here is chosen in order to simulate long scenarios that span many seconds.
For a thorough overview of the models that also include the passive safety systems, be referred to [24, 26]. In contrast to investigations of passive safety measures in the course of an accident, which are already well-established, the period of interest for this study includes only a few moments after the impact. This means that the period of interest for this study occurs well before the passenger comes in contact with the airbags or is significantly restrained by the belts allowing to reduce the overall computational costs significantly. On the one hand, this allows stopping the crash simulations before any computationally complex passenger-safety-system interactions occur. On the other hand, the passive safety system, i.e., thigh belts and airbags, and the rider model can be excluded from the simulation setup as they have no qualitative influence on the simulation results in the period under consideration. These simulation setup modifications are beneficial for the overall numeric costs and allow for the execution of a far greater number of simulations than what would have been feasible within the same time with the inclusion of rider and passive safety systems.
A crucial issue with generating data from the model is that, due to complexity, the model does not allow for the application of lateral dynamics. Cornering behaviour can thus not be incorporated into the dataset. Hence, only longitudinal dynamics are covered by the training data. This circumstance has far-reaching ramifications: Since, for example, the steering angle moves out of the 0? position in case of a head-on crash and by design never leaves this position during normal (non-crash) riding, the classifier would be induced false knowledge and would most likely decide solely on the basis of the steering angle signal.
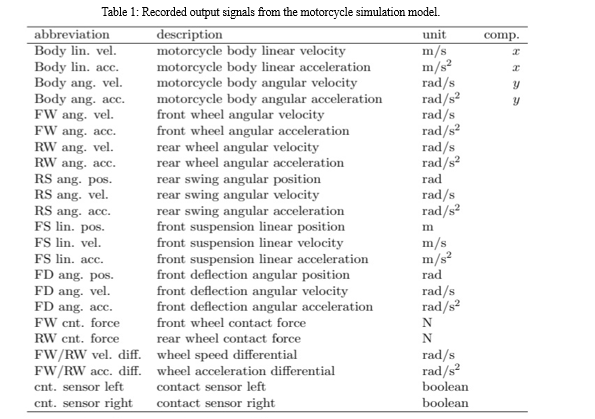
To circumvent this contingency, signals that contain information about lateral motion are to be strictly neglected in order not to overestimate the decision-making ability of a classification model. This poses a major restriction on parts of the available sensor data, as certain DOFs are only changed when the motorcycle collides with an opponent. Signals that are affected by the restriction are the motorcycle body’s velocity and acceleration, both linear and angular. In Table 1, all modelled sensors and available signals are listed. The first five signals are subject to dimensional limitation. The used component of these signals is given in the last column.
In order to emulate the response of a tire pressure sensor, the resulting contact force between the crash opponent and each tire is combined with the contact force between each tire and the road surface, yielding the residual contact forces φFW and fRW for the front and respectively the rear wheel.
VI. DATA ACQUISITION
A notable benefit of the proposed method is that the data used to train ML models does not come from logged real-world sensor data but from closely monitored simulations. This means that each individual sample can be assigned to a scenario and, therefore, also state (non-crash/crash). The knowledge about the state introduces the ability to use supervised learning methods. A switch is incorporated into the model in order to automate the labelling process. It is flipped as soon as a part of the motorcycle comes in contact with the car. The switch is allowed only one initial flip since, for the purpose of this elaboration, a crash does not stop until the simulation terminates. The switch reliably distinguishes between normal non-crash operation and crash scenarios, and is, thus, eligible to be further used as a class label for the machine learning classification application.
A fundamental operation of this investigation is to produce data covering the whole spectrum of both non-crash driving and crash scenarios. Training data must contain all necessary information to reliably differentiate between those two states, but it can only be composed of a multitude of individual simulations. The fact that the labelling process is not a task to be carried out manually but rather by the simulation itself enables to consider all necessary scenarios. Henceforth, a scenario-parameter-based simulation definition is used to fully exploit the fact that individual simulation postprocessing is not required. Consequently, a set of scenario parameters with an allocated range defines each subset. The individual subsets are then merged to form a comprehensive database. In order for the parameter space to be sufficiently covered by a given number of instances, Latin-hypercube sampling (LHS) is applied. LHS, in contrast to simple-randomsampling (SRS), subdivides each parameter’s range into equal-sized subdivisions, thus effectively partitioning the entire parameter space into hypercubes, called strata. A random sample is generated from each stratum, thus ensuring that the resulting distribution is fully representative of a given population ([29]). All resulting simulative measurements are available under [34].
A. Class A: Uncritical Data
Within the class of uncritical data, simulations are divided into two subsets. The first of which uses a sinusoidal base structure as a road profile. The second subset supplementary adds specified use cases to the database that cannot be reproduced by the sinusoidal subset.
Scenario Set A.1
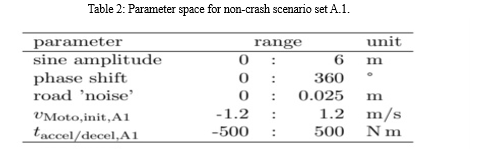
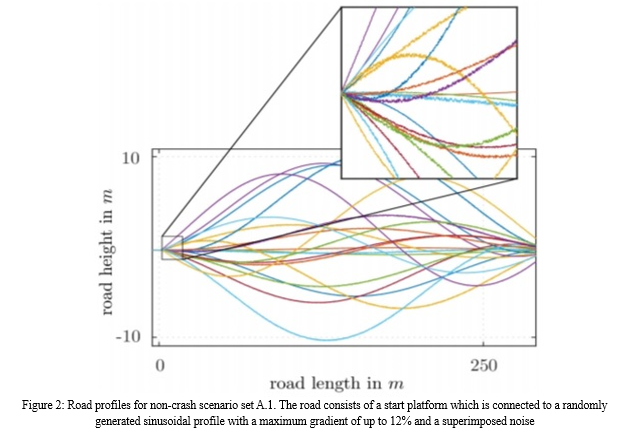
A mesh of rigid shell elements which is created before each simulation serves as contact surface for the motorcycle. This road model has a total length of 300 m and a segment length of 0.2 m. The sine amplitude ranges from 0 m to 6 m. The first subset’s road profile is described by a sinusoidal base profile with added noise in order to mimic road-unevenness. By ensuring that the interval length corresponds to the road length, the steepest section is limited to a road gradient of 12% which amounts to the maximum gradient found on open roads according to [22]. Phase shift and noise amplitude are also incorporated as parameters for additional variation. A set of 20 exemplary road profiles is depicted in Fig. 2. The figure additionally depicts an expanded view in order to illustrate the superimposed noise. The motorcycle’s initial velocity ranges from 3 m/s up to 23 m/s. The speed range is chosen to correspond to that of the crash scenarios (6). Otherwise, if speed distribution in one class far exceeds that of the other class, the classification model would tend to incorporate that bias. Lastly, brake and acceleration torque acting on the wheel hubs are derived from one single parameter (since they cannot occur at once).
[8] show that the mean braking torque of a motorcycle can be assumed to be 500 Nm and is distributed, so that 70% is directed to the front wheel and 30% to the rear wheel. Likewise, [14] investigate the acceleration of high-performance race motorcycles. The authors state that the braking torque at the wheel can reach up to 1000 Nm. As a conservative estimate the acceleration torque limit is set to 500 Nm since the motorcycle under investigation here is not designed for racing. Scenario set A.1 is composed of 100 entities that are parametrized via LHS. The parameters with their corresponding variation range are listed in Tab. 2.
Scenario Set A.2
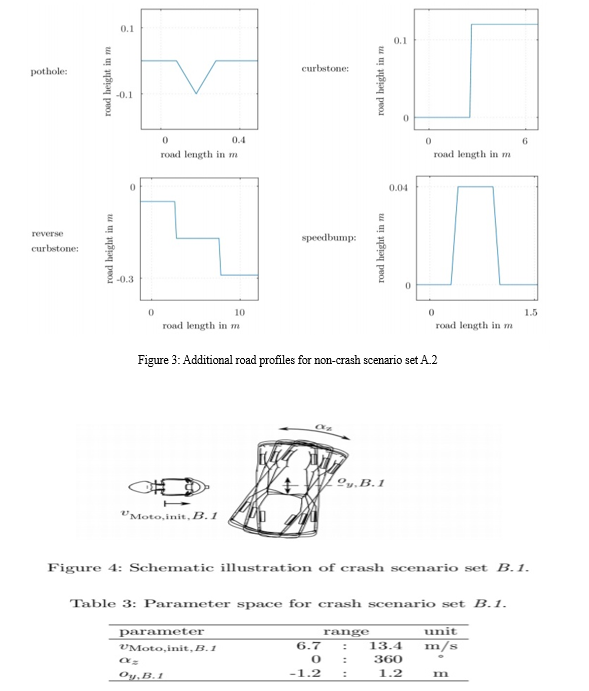
Although the parametrized scenario generation already covers a wide range of applications, some use cases cannot be emulated by this method and should still be considered in the database. These scenarios, referred to as set A.2, are designed manually and appended onto the dataset. Namely, these simulations are intended to replicate the following use cases: (i) riding over potholes, (ii) approaching a curb stone, (iii) riding down multiple curb stones, and (iv) riding over speedbumps. Road profiles that are designed to imitate these obstacles are depicted in Fig. 3. In combination with initial velocities lying within the same range as in subset A.1, see Tab. 2 and using LHS as sampling method, a total of 20 simulations (4 in each use case) are performed to build subset A.2.
A. Class B: Crash Data
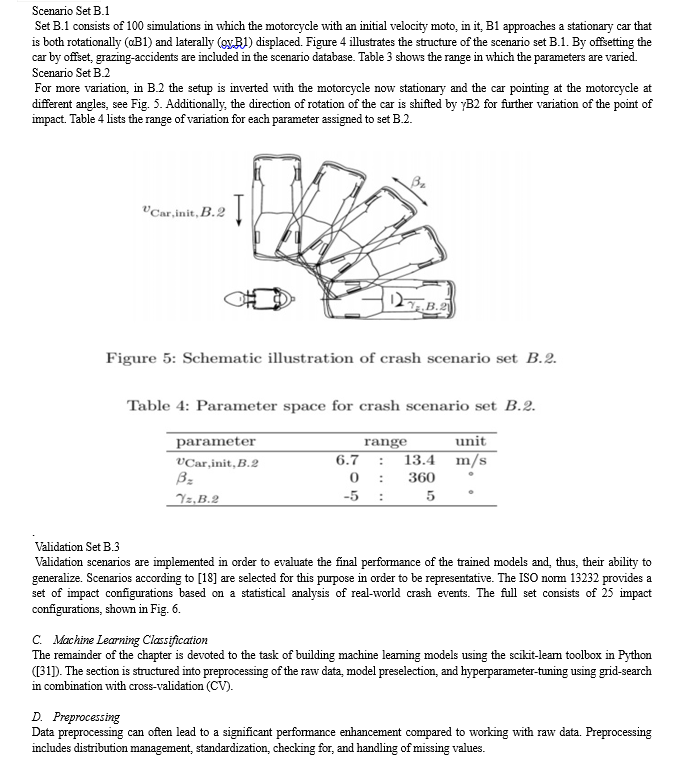
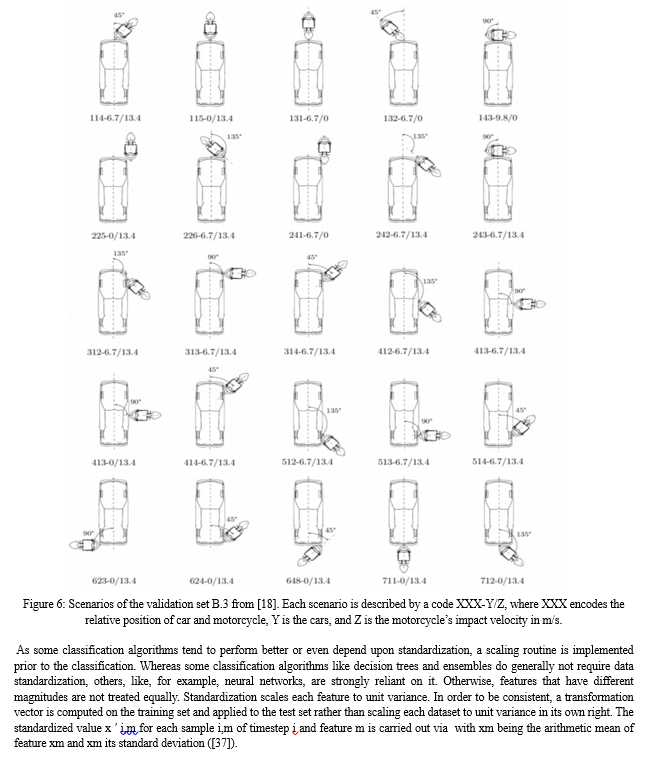
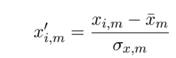
The data containing accidents involves more than just head-on collisions, where simple threshold-based decision logic would suffice for detection. Instead, the aim is to examine a broad range of conceivable impact scenarios. Consequently, parametrized scenario generation is resorted to again. Two different base architectures are designed to cover the motorcycle striking a stationary car at different angles and velocities (subset B.1) and a car striking the stationary motorcycle at different angles and velocities (subset B.2). Additionally, a set of ISO 13232 crash scenarios are simulated and preserved in order to validate the classifier’s ability to generalize after being trained.
An additional preprocessing method is featuring extraction via principal-componentanalysis (PCA). It aims to derive meaningful and non-redundant variables from the original dataset by projecting it to a lower-dimensional space by means of singular value decomposition (SVD). By this the original dimension of the feature space dimension, which is with a total of 23 features fairly high, could be reduced, this could be beneficial considering that the concluding model is to be run in real-time on an embedded system. However, the desired effect does not materialize well and the method proves to be ineffective for this application. Consequently, it will not be addressed further in this report. For a thorough introduction to PCA and its potential enhancements be referred to [1]
E. Training-Test-Split
A decisive circumstance to consider when subdividing time-dependent data is that neighbouring samples have a tendency to be located in close proximity to each other. A random training test split, like it is often performed on non-time-dependent data, is, henceforth, not an appropriate splitting method [33]. In the case of this application, training-test-split is carried out on whole coherent simulations itself rather than on samples. As this is a safety-critical application, a 50-50 split is performed, meaning half of the available data is retained for testing to cover a broad range of scenarios. The remaining half is dedicated towards training the models. Additionally, none of the ISO scenarios of set B.3 shall be included in the training set as it is of particular interest to assess how well-trained models generalize on these representative scenarios.
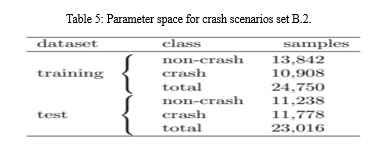
When training a model for classification purposes, close attention must be paid towards the distribution of the two classes. Since crash-labelled samples are, in this case, much less frequently represented in the raw dataset, non-crash-labelled data requires subsampling in order to achieve equal distribution. The desired distribution is achieved with a sampling rate of twelve. The resulting sizes and distributions of the two datasets are displayed in Tab. 5.
For the final application of the real-time classification model into the virtual” system” of the motorcycle, a sample rate of 2 kHz is selected. This is a sample rate that most commercially available sensors are able to safely handle and which also leaves a sufficient margin of samples for the implementation of an activation threshold. In addition to the above-mentioned training and test datasets, which are no longer subject to a uniform sample rate, individual scenario datasets are prepared, which incorporate the realistic scenarios from [18]. Those simulations are synchronized to the selected sample rate of 2 kHz in order to evaluate the model’s decisional delay.
VII. MODEL PRESELECTION
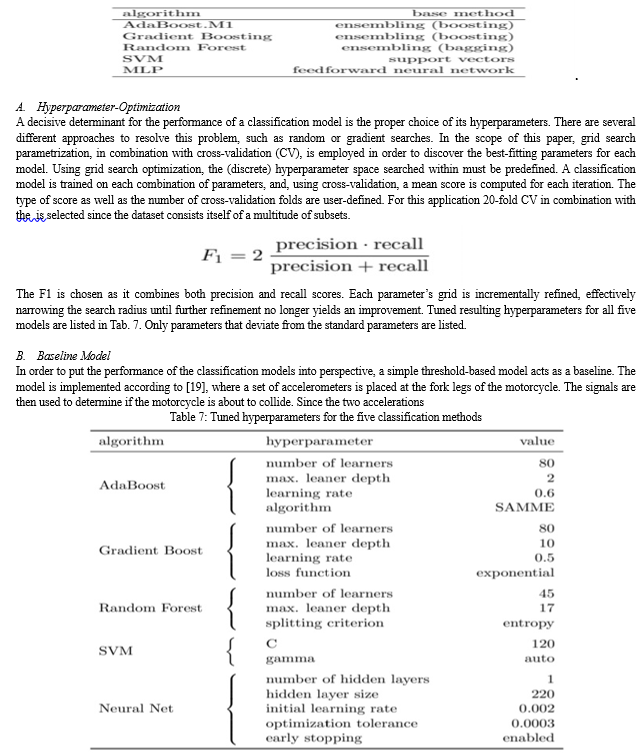
The amount of available classification algorithms is extensive and thus not feasible to investigate exhaustively. A preselection of suitable algorithms is therefore shortlisted. The preselection is designed to incorporate multiple different classification approaches like assembling, support vector machines (SVMs), and artificial neural networks (ANNs) as they are some of the most frequently used algorithms available. Tab. 6 lists all preselected models and their underlying method.
Table 6: Preselection of scikit-learn classification algorithms
signals are averaged, in this paper there is only one accelerometer placed at the front hub. The models only parameter is the threshold at which it detects an impending collision. This threshold is tuned on the training data in the exact same way as for the other models, with its hyperparameter-space being only one dimensional. 19
VIII. RESULTS AND DISCUSSION
In this section, the results from the previously introduced trained classification models are compared to each other and are individually evaluated for fitness. ML classificationspecific criteria on one side, as well as several application-specific criteria, act as a basis for comparison. Furthermore, available sensor data is examined and ranked according to its individual contribution. The computation of feature importance can be helpful to point out whether the feature space dimension can be reduced. The final section describes the individual feature contribution, giving an overview of sensor significance that can assist future work.
A. Capability Assessment
The following sections serve as an illustration of the trained classification models’ performance. This allows to draw a comparison between the models and assess the level of proficiency that can be expected from a specific model. In addition to a selected set of machine learning performance metrics, a few domain-specific criteria are established. The main objective is to outline the overall performance as broadly as possible in order to make a reasoned choice when selecting a model.
B. Performance Measures
Performance metrics that are considered to evaluate and compare the achieved training results are the receiver operating characteristic (ROC) curve, explained e.g. in [4], which shows the true positive (TP)-false positive (FP) trade-off of a model. The area under the ROC curve (AUC) quantifies the individual trends. Additionally, scores that are computed from the confusion matrix are listed. For the sake of clarity, the resulting confusion matrix of all models is shown in the appendix (Fig. 12).
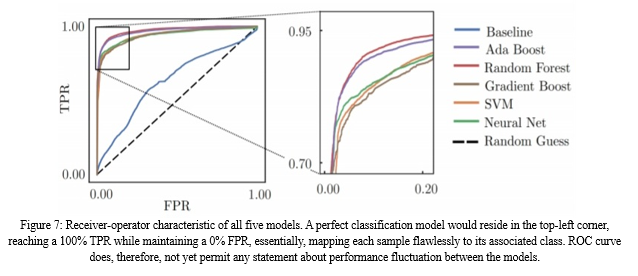
C. Receiver-Operator Characteristic
The resulting receiver operator characteristics for all trained models are displayed in Fig. 7. All curves lead through the sweet spot in the upper left corner, where classification yields a high TPR while maintaining a low FPR. The results indicate that there is no direct trade-off for all models between achieving a high TP rate (TPR) and keeping the FP rate (FPR) low. The ROC curves show an almost identical trend for four of the models, with only the AdaBoost model’s performance being marginally poorer.
D. Machine Learning Scores
Since one single index is not able to sufficiently describe the performance of a classification model, a selection of metrics is chosen. The intention is not only to point out which models perform well and which are rendered unfit but also to indicate potential overfitting by computing the score on the training data. Consequently, a well-fitted model will tend to yield similar scores on both sets sacrificing training accuracy for better generalization ability. In contrast, an overfitted model tends to achieve a higher score on the training set than on the test set.
The resulting scores are collected in Fig. 8.
• The AUC Score quantifies the trend given by the receiver-operating characteristic, by calculating the area underneath the curve. A higher score means the demand for a better TPR does not tend to sacrifice a models FPR and vice versa.
• Accuracy measures the rate of correctly classified samples of both classes out of all samples. It is thus a valuable indicator of overfitting, if a model yields a sufficiently lower score on the test set than on the training set.
• The precision score, which in this context accounts for the classifier’s ability to not falsely misclassify a non-crash sample as a crash. Sufficient scoring on this assessment is of elementary importance for applying the method presented in
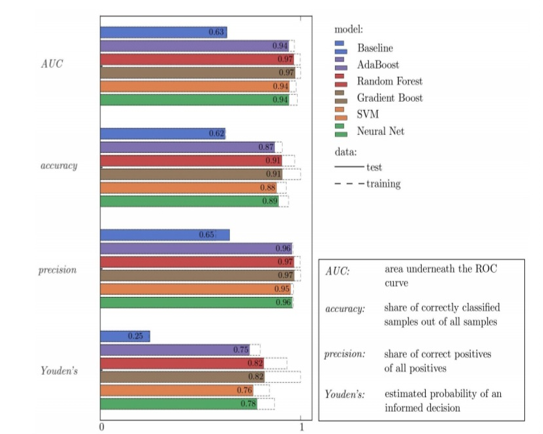
21 Figure 8: Performance scores of all five trained models computed on both training and test data. A large deviation between training and test score is a strong indicator for and overfitted model.
22 this report. Frequently misclassifying class A samples and, thus, falsely initiating deployment of passive safety mechanisms render the implementation of a ML-based crash detection algorithm possibly more harmful than profitable.
• As a combination of sensitivity and recall, Youden’s index measures the overall informed Ness of a model’s decision-making process
. Summarizing the scores and discrepancies presented in Fig. 8 permits to conclude the models’ performance and generalizing ability.
At first glance it is clearly visible, that the baseline model is not able to keep up with the ML models in terms of performance. Its scores are significantly lower than those of the other models. The poor scores indicate, that the model may be able to make a decision, albeit not an informed one. In comparison to the baseline model the ML models tend to achieve a similar performance, with the AUC scores only ranging from 0.94 to 0.97 and precision being almost identical. The accuracy and Youden’s scores however hold more information. Firstly, the test scores of the Random Forest and Gradient Boost models are slightly higher than that of the other models. However, as the dashed line suggests, their ability to generalize will be impaired due to overfitting. To summarize, all of the five models achieve a similar performance with two of the models being subject to overfitting.
E. Crash Prediction Requirements
Besides the aforementioned performance criteria which assess the classification models themselves, there are certain requirements that are given by the very nature of what is intended to follow the crash prediction algorithm. These requirements are that (i) no false detection is raised when not at risk for accidents, that (ii) detection delay is sufficiently short, for the airbag to deploy fully before the rider impacts the motorcycle, and that (iii) the model is computationally efficient. The first domain requirement results from the fact that the algorithm is intended to initiate passive safety precautions, such as the deployment of the airbag and fastening of the thigh belts. Some of the used airbags are non-deflating and, thus, stay inflated for at least a few seconds. False deployment should, therefore, be avoided at all costs due to the obstruction of visibility and manoeuvrability as well as rider shock and product reputation. Requirement (ii) aims to keep the prediction delay of the classification models modest since the airbag inflation takes a comparably long time due to a much larger volume than that of a passenger car. In this context, a prediction time lower than 12 Ms has proven to be sufficient in order for the airbag to inflate fully in time [13]. Furthermore, the fundamental idea behind this investigation is that the classification model operates in real-time on the motorcycle’s 23
embedded system. It is, therefore, reasonable to analyse and compare the latency of the classification models since CPU capacity can be assumed to be seriously limited. The requirements are tested on the ISO scenarios presented in Fig. 6 as well as a share of sets A.1 and A.2 that are preserved for the test set and that act as control scenarios. Thus, all data the classifier is tested upon is not included in the training set and is not used for hyperparameter tuning.
F. Decisional Delay
Requirement (i) and (ii) correlate strongly, as can be concluded from a conceptual experiment concerning the ROC curve. If the activation threshold activation is set arbitrarily high, the rate of false positives will diminish as would true positives resulting in the lower-left corner in the ROC plane. In the opposing case that the detection threshold is set arbitrarily low. In this case, no positive value goes undetected but at the cost of misclassifying each negative sample in doing so.
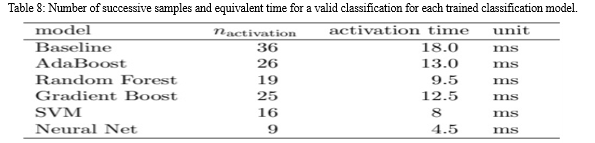
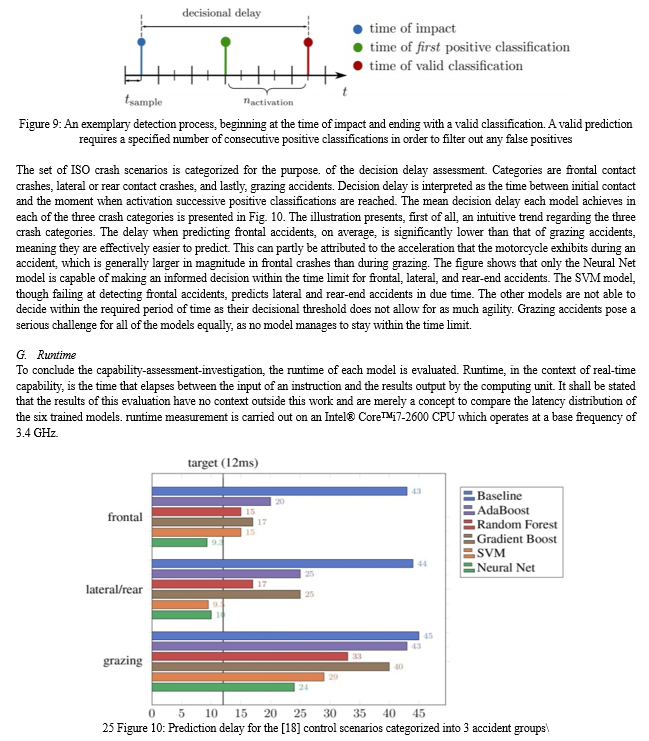
Thus, the two requirements are accounted for in the same process. The activation threshold activation assigns a limit to each classification model that tells how many successive samples must be positively classified in order for a valid prediction to be made. The schematic process is explained in Fig. 9. The threshold values are tuned individually for each model so that no false prediction is made in control scenarios. Classification models that are subject to a higher FP rate are consequently assigned a higher threshold activation. The individual activation thresholds are listed in Tab. 8.
From Tab. 8 it becomes apparent that at a sample rate sample of 2 kHz and an activation threshold activation = 26 and 25, the AdaBoost and Gradient Boost models are rendered unfit as they could not meet the required decisional delay of 12 Ms even with a perfect accuracy score.
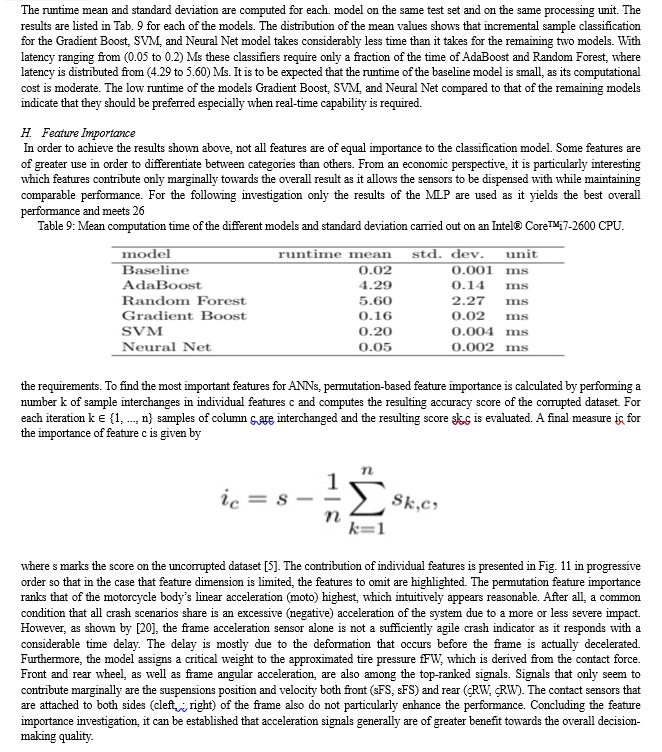
A fact that is particularly convenient, as accelerometers are among the most widely used sensors. In contrast, position and velocity signals do not contribute equally as much. This also serves as a potential explanation for the prolonged mean decisional delay that is observed in grazing accidents for all five models. Since in grazing accidents, the induced (negative) acceleration is not as pronounced as in other types of accidents, the acceleration-dominant classifiers fail to respond in due time. This forfeit, however, is admissible since it implies that severe accidents with more pronounced acceleration are reliably detected.
IX. DESIGN CONSIDERATIONS FOR AIRBAG SYSTEMS
Size and Placement The effectiveness of airbag systems in motorcycle safety depends largely on their size and placement within the rider’s gear. Frontal airbag modules, for example, must be strategically positioned to provide adequate coverage for the rider’s chest, abdomen, and spine while avoiding interference with other protective gear such as helmets and body Armor. Manufacturers carefully design airbag vests and jackets to ensure optimal placement and coverage of airbag modules. This often involves conducting extensive testing and evaluation to determine the most effective configuration for protecting vital body parts while minimizing bulk and discomfort for the rider. Additionally, the size and shape of airbag modules must be carefully tailored to accommodate a wide range of rider sizes and body types. Adjustable straps and fasteners allow riders to customize the fit of their airbag gear for maximum comfort and protection. Deployment Speed Another important design consideration for airbag systems is deployment speed. In the event of a crash, airbags must inflate rapidly to provide immediate protection for the rider. Delayed deployment or slow inflation can significantly reduce the effectiveness of airbag systems and increase the risk of injury. Manufacturers employ various mechanisms and inflation systems to ensure rapid deployment of airbag modules.
Some systems utilize compressed gas cartridges or pyrotechnic actuators to inflate the airbags within milliseconds of a crash, while others rely on mechanical triggers or electronic sensors to initiate inflation. Regardless of the deployment mechanism used, the goal is to ensure that airbag systems activate quickly and reliably in the event of an accident, providing riders with immediate protection when they need it most. Durability and Reliability Durability and reliability are essential considerations in the design of airbag systems for motorcycle safety gear. Motorcycle riders often encounter challenging environmental conditions, including exposure to heat, cold, moisture, and debris. Airbag vests and jackets must withstand these conditions while maintaining their effectiveness and performance. Manufacturers use high-quality materials and construction techniques to ensure the durability and reliability of airbag gear. Reinforced stitching, abrasion-resistant fabrics, and impact-resistant materials are commonly used to enhance the structural integrity of airbag vests and jackets, ensuring they can withstand the rigors of daily use. Additionally, regular maintenance and inspection are essential to ensure the continued reliability of airbag systems. Riders should follow manufacturer guidelines for care and maintenance, including checking for signs of wear or damage, replacing expired components, and servicing the inflation system as needed.
X. TESTING AND EVALUATION OF AIRBAG SYSTEMS
- Crash Simulation Tests Crash simulation tests are a crucial component of the testing and evaluation process for airbag systems in motorcycle safety gear. These tests involve replicating real-world crash scenarios in controlled environments to assess the performance and effectiveness of airbag systems under various conditions. During crash simulation tests, researchers use advanced computer modelling and simulation software to recreate the dynamics of motorcycle crashes, including factors such as vehicle speed, impact angle, and surface conditions. Crash test dummies equipped with sensors and data recording devices are used to measure the forces experienced by the rider and assess the performance of the airbag system. By subjecting airbag systems to simulated crash scenarios, researchers can evaluate their ability to deploy rapidly, inflate to the correct pressure, and provide adequate protection for the rider’s body. This allows manufacturers to identify any design flaws or performance issues and make improvements before bringing the product to market.
- Impact Force Measurements In addition to crash simulation tests, impact force measurements are used to evaluate the effectiveness of airbag systems in reducing the severity of injuries sustained by motorcycle riders. These measurements involve quantifying the forces experienced by the rider’s body during a crash and comparing them to established safety standards and guidelines. Impact force measurements are typically conducted using specialized equipment such as force plates, accelerometers, and pressure sensors. Crash test dummies equipped with these sensors are subjected to controlled impacts to simulate real-world crash scenarios, allowing researchers to quantify the forces transmitted to the rider’s body and assess the performance of the airbag system. By analysing impact force data, researchers can determine the extent to which airbag systems reduce the severity of injuries and improve overall rider safety. This information is critical for evaluating the effectiveness of airbag systems and informing future design improvements.
- Performance Analysis Performance analysis involves evaluating various metrics and parameters to assess the overall effectiveness of airbag systems in motorcycle safety gear. This includes factors such as deployment speed, inflation pressure, coverage area, and reliability under different conditions. Researchers use a combination of laboratory testing, field evaluations, and real-world crash data to analyse the performance of airbag systems in actual riding scenarios. By collecting and analysing data from a wide range of sources, researchers can gain valuable insights into the strengths and weaknesses of airbag systems and identify opportunities for improvement. Performance analysis also involves comparing the performance of different airbag systems and configurations to determine which designs offer the best combination of protection, comfort, and usability for motorcycle riders. This helps manufacturers refine their products and develop new innovations to enhance rider safety.
XI. CHALLENGES AND LIMITATIONS
- Cost and Affordability One of the primary challenges facing the widespread adoption of airbag systems in motorcycle safety gear is cost and affordability. The development and manufacturing of airbag vests and jackets require specialized materials, components, and technologies, which can drive up production costs. Additionally, the inclusion of sophisticated sensors, inflation systems, and other features further increases the price of airbag gear. As a result, airbag systems for motorcycles are often significantly more expensive than traditional protective gear such as helmets and body Armor. This high cost can be a barrier to adoption for many riders, particularly those on a tight budget or who prioritize other motorcycle accessories and equipment. To address this challenge, manufacturers are working to reduce the cost of airbag systems through advancements in materials, manufacturing techniques, and economies of scale. Additionally, some companies offer rental or leasing options for airbag gear, allowing riders to access the safety benefits of airbag systems without the upfront investment.
- User Acceptance and Adoption Another challenge facing the widespread adoption of airbag systems in motorcycle safety gear is user acceptance and adoption. Despite the proven benefits of airbag technology in reducing injuries and fatalities, some riders may be hesitant to embrace this new technology due to concerns about comfort, fit, and ease of use. Airbag vests and jackets are bulkier and heavier than traditional protective gear, which can impact rider comfort and mobility, particularly during long rides or in hot weather. Additionally, some riders may find the process of donning and doffing airbag gear cumbersome and time-consuming, leading to reluctance to wear it regularly. To overcome these challenges, manufacturers are focusing on improving the comfort, fit, and usability of airbag systems through innovative design features and materials. This includes incorporating lightweight and breathable fabrics, ergonomic designs, and adjustable straps and fasteners to enhance rider comfort and mobility. Additionally, education and outreach efforts are critical for increasing awareness and understanding of the benefits of airbag technology among motorcycle riders. By providing information and resources on the safety advantages of airbag systems and addressing common misconceptions and concerns, manufacturers can help encourage greater acceptance and adoption of this life-saving technology.
- Technical Constraints Technical constraints pose significant challenges to the widespread adoption of airbag systems in motorcycle safety gear. These constraints include limitations in sensor technology, integration with existing motorcycle systems, and compatibility with different riding styles and environments. One of the primary technical constraints is the need for reliable and responsive sensors to detect crashes and trigger the deployment of airbag systems. Current sensor technologies may not always accurately detect crashes or may be prone to false positives, leading to inadvertent inflation of airbags or failure to deploy in genuine crash scenarios. Additionally, integrating airbag systems with existing motorcycle systems, such as braking and stability control systems, can be complex and challenging. Ensuring seamless communication and coordination between different components requires sophisticated engineering and software development, which may not always be feasible or cost-effective. Furthermore, designing airbag systems that are compatible with a wide range of riding styles and environments presents additional technical challenges. Motorcycle riders engage in a variety of activities, from commuting to work to long-distance touring to offroad adventure riding, each of which presents unique safety considerations and requirements for airbag systems. Addressing these technical constraints requires ongoing research and development efforts to advance sensor technology, improve integration with motorcycle systems, and enhance the versatility and adaptability of airbag systems. Collaboration between manufacturers, researchers, and regulatory agencies is essential to overcome these challenges and accelerate the adoption of airbag technology in motorcycle safety gear.
XII. FUTURE TRENDS AND INNOVATIONS
- Advanced Sensor Technologies Advancements in sensor technology hold promise for addressing many of the technical constraints associated with airbag systems in motorcycle safety gear. Emerging sensor technologies, such as artificial intelligence, machine learning, and advanced computer vision, offer improved accuracy, reliability, and responsiveness in detecting crashes and triggering the deployment of airbags. By leveraging these advanced sensor technologies, manufacturers can develop nextgeneration airbag systems that are more intelligent, adaptive, and effective in protecting motorcycle riders. For example, sensors equipped with machine learning algorithms can learn to distinguish between normal riding behaviour and emergency situations, reducing the risk of false positives and improving overall system performance. Additionally, advancements in sensor miniaturization and integration enable the development of smaller, lighter, and more discreet sensors that can be seamlessly integrated into motorcycle gear without compromising comfort or mobility. This allows for greater flexibility in design and placement of sensors, enhancing the effectiveness and usability of airbag systems.
- Machine Learning and Predictive Algorithms (Continued) Machine learning algorithms can be trained to recognize these patterns and predict the likelihood of a crash based on various factors, such as rider behaviour, road conditions, and environmental variables. By incorporating predictive algorithms into airbag systems, manufacturers can enhance their ability to pre-emptively deploy airbags in anticipation of an imminent crash, providing riders with even greater protection. For example, predictive algorithms could analyse data from onboard sensors to detect signs of impending loss of control, such as sudden changes in acceleration, braking, or steering inputs. If the algorithm determines that a crash is likely to occur, it could trigger the deployment of airbags before the impact, potentially reducing the severity of injuries sustained by the rider. Additionally, machine learning algorithms can continuously adapt and improve over time as they are exposed to new data and real-world scenarios. This adaptive capability enables airbag systems to evolve and become more effective at detecting and responding to emerging safety threats, such as new types of crashes or changing road conditions.
- Integration with Smart Bike Systems The integration of airbag systems with smart bike systems represents another exciting trend in motorcycle safety technology. Smart bike systems, which encompass a range of connected technologies and sensors embedded within the motorcycle itself, offer opportunities for enhancing rider safety and improving the performance of airbag systems. By integrating airbag systems with smart bike systems, manufacturers can leverage real-time data from onboard sensors to enhance the functionality and effectiveness of airbag deployment. For example, sensors that monitor vehicle dynamics, such as acceleration, lean angle, and wheel speed, can provide valuable insights into the rider’s behaviour and the current operating conditions of the motorcycle. This data can be used to inform the deployment decision of airbag systems, ensuring that they activate at the optimal moment to provide maximum protection for the rider. Additionally, smart bike systems can facilitate communication between the motorcycle and other vehicles or infrastructure, enabling advanced safety features such as collision avoidance and automatic emergency braking. Furthermore, integration with smart bike systems opens up possibilities for enhanced post-crash communication and emergency response. In the event of a crash, airbag systems equipped with GPS and communication capabilities can automatically transmit the rider’s location and vital information to emergency services, enabling faster response times and potentially saving lives.
Conclusion
In conclusion, airbag systems represent a significant advancement in motorcycle safety technology, offering riders an additional layer of protection in the event of a crash. By reducing impact forces, protecting vital body parts, and preventing fatal injuries, airbag systems have the potential to save lives and improve the overall safety of motorcycle riders. Despite the challenges and limitations associated with their adoption, ongoing research and development efforts are driving innovation in airbag technology, with advancements in sensor technology, machine learning, and integration advancements in sensor technology, machine learning, and integration with smart bike systems. These advancements hold promise for further enhancing the effectiveness and usability of airbag systems, making them an indispensable tool for improving motorcycle safety in the future. As the technology continues to evolve and mature, it is essential for manufacturers, researchers, and regulatory agencies to work together to address technical constraints, overcome barriers to adoption, and accelerate the integration of airbag systems into motorcycle safety gear. By collaborating and innovating, we can ensure that airbag technology realizes its full potential in saving lives and preventing injuries in motorcycle accidents.
References
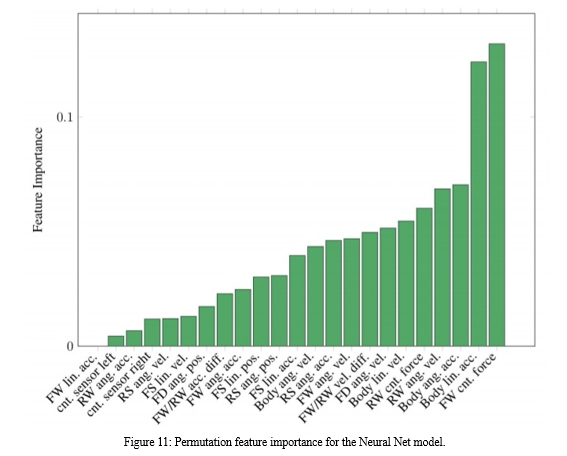
[1] Ash, K. (2001, August 25). Cover me beautiful. The Telegraph. https://www.telegraph.co.uk/motoring/motorbikes/2715117/ Cover-me-beautiful.html BMW Motored. (2000). Pressemappe BMW CI. BMW AG., 80788 München, Germany. [2] Cairns, H., (1941). Head Injuries in Motor-cyclists. The Importance of the Crash Helmet. [3] British Medical Journal, 2, 465-471. https://doi.org/10.1136/bmj.2.4213.465 Centres for Disease Control and Prevention (CDC). (1999). Morbidity and Mortality Weekly Report (MMWR). Achievements in Public Health, 1900-1999. Motor-Vehicle Safety: A 20th Century Public Health Achievement. 48(18), 369-374. Atlanta: Centres for Disease Control and Prevention. https://pubmed.ncbi.nlm.nih.gov/10369577/ [4] DE Amicus, M. (2015, December 22). The BMW CI-BMW\'s First Scooter. BMWBLOG. https://www.bmwblog. com/2015/12/22/the-bmw-ell/ [5] Department for Transport statistics (DfF). (2015a). Road Accident Statistics. Facts on Road Fatalities. June 2015. London: Department forTransport. https://assets.publishing service gov.uk/government/uploads/system/uploads/attachment data/file/448037/road-fatalities-2013-data.pdf [6] Ahmadi, H., Arji, G., Shahmoradi, L., Safdari, R., Nilasha, M., & Alizadeh, M. (2019). The application of internet of things in healthcare: a systematic literature review and classification. Universal Access in the Information Society, 18(4), 837869. doi:10.1007/s10209-018-0618-4 [7] Ahn, M., Kang, J., & Hustvedt, G. (2016). A model of sustainable household technology acceptance. International Journal of Consumer Studies, 40(1), 83-91. doi:https://doi.org/10.1111/ijcs.12217 [8] Ajzen, I. (1991). The theory of planned behavior. Organizational Behavior and Human Decision Processes, 50(2), 179-211. doi:https://doi.org/10.1016/0749-5978(91)90020-T [9] Ajzen, I., & Fishbein, M. (1973). Attitudinal and normative variables as predictors of specific behavior. Journal of Personality and Social Psychology, 27, 41-57. doi:10.1037/h0034440 [10] Al-Bashayreh, M., Almajali, D., Al-Okaily, M., Masa’deh, R. e., & Samed Al-Adwan, A. (2022). Evaluating Electronic Customer Relationship Management System Success: The Mediating Role of Customer Satisfaction. Sustainability, 14(19), 12310. Retrieved from https://www.mdpi.com/2071-1050/14/19/12310 [11] Al-Bashayreh, M., Almajali, D., Altamimi, A., Masa’deh, R. e., & Al-Okaily, M. (2022). An Empirical Investigation of Reasons Influencing Student Acceptance and Rejection of Mobile Learning Apps Usage. Sustainability, 14(7), 4325. Retrieved from https://www.mdpi.com/2071-1050/14/7/4325 [12] Al-Fuqaha, A., Guizani, M., Mohammadi, M., Aledhari, M., & Ayyash, M. (2015). Internet of Things: A Survey on Enabling Technologies, Protocols, and Applications. IEEE Communications Surveys & Tutorials, 17(4), 2347-2376. doi:10.1109/COMST.2015.2444095 [13] Alaiad, A., & Zhou, L. (2017). Patients\' Adoption of WSN-Based Smart Home Healthcare Systems: An Integrated Model of Facilitators and Barriers. IEEE Transactions on Professional Communication, 60(1), 4-23. doi:10.1109/TPC.2016.2632822 [14] Aldossari, M. Q., & Sidorova, A. (2020). Consumer Acceptance of Internet of Things (IoT): Smart Home Context. Journal of Computer Information Systems, 60(6), 507-517. doi:10.1080/08874417.2018.1543000 [15] Alsulami, M. H., & Atkins, A. S. (2016). Factors Influencing Ageing Population for Adopting Ambient Assisted Living Technologies in the Kingdom of Saudi Arabia. Ageing International, 41(3), 227-239. doi:10.1007/s12126-016-9246-6 [16] Altamimi, A., Al-Bashayreh, M., AL-Oudat, M., & Almajali, D. (2022). Blockchain technology adoption for sustainable learning. International Journal of Data and Network Science, 6(3), 983-994. [17] Atzori, L., Iera, A., & Morabito, G. (2010). The Internet of Things: A survey. Computer Networks, 54(15), 2787-2805. doi:https://doi.org/10.1016/j.comnet.2010.05.010 [18] Augusto, J. C., & Nugent, C. D. (2006). Smart Homes Can Be Smarter. In J. C. Augusto & C. D. Nugent (Eds.), Designing Smart Homes: The Role of Artificial Intelligence (pp. 1-15). Berlin, Heidelberg: Springer Berlin Heidelberg. [19] [28/04, 08:24] Shiv: [1] H. Abdi and L. J. Williams. “Principal Component Analysis”. In: Wiley Interdisciplinary Reviews: Computational Statistics 2.4 (2010), pp. 433–459. doi: https://doi.org/10.1002/wics.101. [20] F. Aloul et al. “iBump: Smartphone Application to Detect Car Accidents”. In:Computers & Electrical Engineering 43 (Apr. 2015), pp. 66–75. doi: 10.1016/j.compeleceng.2015.03.003. [21] Autoliv. Annual and Sustainability Report 2021. Autoliv Inc., Stockholm, Sweden,2022. url: https://www.autoliv.com/sites/default/files/2022-04/Autoliv_Annual_Sustainability_Report_2021_1.pdf. [22] C. M. Bishop and N. M. Nasrabadi. Pattern Recognition and Machine Learning.Vol. 4. Springer New York, NY, 2006. doi: https://doi.org/10.1117\\%2f1.2819119. [23] L. Breiman. “Random Forests”. In: Machine Learning 45.1 (2001), pp. 5–32. doi: https://doi.org/10.1023/A:1010933404324. [24] J. G. Choi et al. “Car Crash Detection Using Ensemble Deep Learning and Multimodal Data from Dashboard Cameras”. In: Expert Systems with Applications 183(Nov. 2021), p. 115400. doi: 10.1016/j.eswa.2021.115400[28/04, 08:25] Shiv: [25] N. Condro, M.-H. Li, and R. Chang. “Moto safe: Active Safe System for Digital Forensics of Motorcycle Rider with Android”. In: Int. J. Inf. Electron. Eng 2.4(2012), pp. 612–616. doi: https://doi.org/10.7763/IJIEE.2012.V2.171. [26] M. Corno et al. “On Optimal Motorcycle Braking”. In: Control Engineering Practice16.6 (2008), pp. 644–657. doi: https://doi.org/10.1016/j.conengprac.2007.08.001. [27] S. Daub. Untersuchung von Sensorkonzepten Zur Unfallerkennung von Motorr¨ adern(in German). Bachelor Thesis BSC-137. Institute for Engineering and Computational Mechanics, University of Stuttgart, 2021. [28] M. Dean et al. “Potential Crash Benefits of Motorcycle-Detecting Automatic [29] Emergency Braking Systems”. In: Proceedings of the IRCOBI Conference. IRC21-15. http://www.ircobi.org/wordpress/downloads/irc21/pdf-files/2115.pdf. Munich, Germany, 2021, pp. 39–50. [30] L. Deng. “Development of a Crash Detection Algorithm for Motorcycle Drivers [31] Using Machine Learning”. In: (2021). https://odr.chalmers.se/bitstreams/0e9f7971-105e-4afd-a49e-1335865196ab/download. [32] Destatis. “Verkehrsunf¨alle 2021 (in German)”. In: Verkehr Fachserie 8, Reihe7 (2022). https : / / www . destatis . de / DE / Themen / Gesellschaft [33] Umwelt/Verkehrsunfaelle/Publikationen/Downloads-Verkehrsunfaelle/verkehrsunfaelle-jahr 2080700217004.pdf?__blob=publicationFile.A. Engel. Airbag f¨ur motorisierte Zweir¨ader: Bericht zum Projekt 1.8903 derfahrzeugtechnischen Forschung des Bundesministers f¨ur Verkehr (in German). [34] Forschungsberichte des Bundesministers f¨ ur Verkehr, Bereich Fahrzeugtechnik ; 8. [35] Bergisch Gladbach: Bundesanst. f¨ ur Straßenwesen, 1992. [36] J. Hauser and A. Saccon. “Motorcycle Modeling for High-performance Maneuvering”. In: IEEE Control Systems Magazine 26.5 (2006), pp. 89–105. doi: http://dx.doi.org/10.1109/MCS.2006.1700047. [37] N. Haworth. “Powered Two Wheelers in a Changing World—Challenges and Opportunities”. In: Accident Analysis & Prevention 44.1 (2012), pp. 12–18. doi: https://doi.org/10.1016/j.aap.2010.10.031. url: https://www.sciencedirect.com/science/article/pii/S0001457510003258. [38] M. Hiemer. Model Based Detection and Reconstruction of Road Traffic Accidents. Karlsruhe: Universit¨atsverlag Karlsruhe, 2005. 225 pp. doi: 10.5445/KSP/1000001370. philipp.rodegast, jonas.kneifl, joerg.fehr@itm.uni-stuttgart.de. Institute of Engineering and Computational Mechanics, University of Stuttgart, Pfaffenwaldring 9, 70569 Stuttgart, Germany
Copyright
Copyright © 2024 Shivam Rupnawar, Puja Deokate, Mohit Bhandari. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61181
Publish Date : 2024-04-28
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online