

Ijraset Journal For Research in Applied Science and Engineering Technology
Agricultural Field Monitoring Robot: Using IoT
Authors: Padala Yeswanth Reddy, Sudharshan G, Mohith V
DOI Link: https://doi.org/10.22214/ijraset.2024.63911
Certificate: View Certificate
Abstract
The agricultural field monitoring robot is a big step forward in precision farming. It uses technology like path memorization and smart IoT to help farmers manage their fields better. The robot can move around the farm on its own, remembering where it\'s been to do tasks more efficiently later. It\'s built on a platform-Arduino car system, which is controlled via Bluetooth. The smart IoT part comes from a platform called BlynkIOT, this system gathers data in real-time, helping farmers keep track of things like crop health and environmental conditions. With these technologies combined, the robot can do things like planting seeds, watering crops, and checking their health without needing much help from humans. Overall, it\'s meant to help farmers work smarter, save money on labor, and farm in a more sustainable way.
Introduction
I. INTRODUCTION
The agricultural field monitoring robot developed with the Arduino Uno platform at its base, this robot enables path memorization through Bluetooth connectivity, performing repetitive tasks in farming operations. It is equipped with sensors that are integrated with the Blynk IoT platform, allowing real-time monitoring of soil moisture, temperature, and humidity. This data empowers farmers to make informed decisions regarding irrigation and pest control, ultimately leading to improved crop yield and quality. The combination of mobile robotics and IoT not only boosts yields but also reduces environmental impact and enhances food safety standards. By automating tasks and delivering precise data, the agricultural field monitoring robot plays a major role in promoting sustainable farming practices.
A. Background
The fusion of Internet of Things (IoT) technology and robotics within agricultural practices marks a notable progression in precision agriculture. This combination try to elevate the effectiveness, output, and ecological viability of farming activities. The project I'm engaged in amalgamates diverse technological facets—such as IoT, sensors, and robotics—to tackle assorted challenges in agriculture, notably in plant surveillance and field traversal.
B. Motivation
The primary motivation for this project is to leverage advanced technologies to solve real-world problems in agriculture:
- Efficiency: Robots can work non-stop and do things more accurately than people, like watering plants and keeping an eye on them.
- Saving money: Using robots means farmers don't need as many workers, which can cost a lot. Plus, controlling things like water and temperature precisely can save on water and electricity bills.
- Making smart choices: Sensors collect data in real-time, helping farmers make quick decisions that can keep plants healthy and boost crop yields.
- Adaptable and easy to use: These high-tech systems can be adjusted to work with different crops and farming methods, making them useful for all kinds of farms.
II. LITERATURE REVIEW
Nurzaman Ahmed, Debashis De, Iftekhar Hussain has published a paper entitled “Internet of things (IoT) for smart precision agriculture and farming in rural areas”. The paper explores how IoT technology can revolutionize farming and agriculture, especially in rural areas. It introduces the concept of smart farming, where IoT devices and fog computing are used to monitor and control agricultural environments, making farming more efficient and productive. The authors propose a scalable network architecture specifically designed for rural agriculture, which allows for real-time data collection, analysis, and management of farming operations.
This system aims to optimize resource use, improve crop yields, and reduce manual labor by automating various agricultural processes. The paper highlights the potential of IoT in transforming agriculture into a more precise, sustainable, and data-driven practice, addressing the unique challenges faced by rural farming communities.[1]
Khawla Almazrouei, Ibrahim Kamel, and Tamer Rabie has published a paper entitled “Dynamic Obstacle Avoidance and Path Planning through Reinforcement Learning”. This paper presents a detailed examination of how reinforcement learning (RL) is utilized in autonomous mobile robots for dynamic obstacle avoidance and path planning. It explores how RL techniques have advanced in navigating complex and changing environments, crucial for improving the effectiveness and safety of autonomous systems. The study reviewed 34 recent studies, focusing on how different RL algorithms perform in various scenarios and environments. The paper categorizes these studies based on their methods for obstacle avoidance and path planning, discussing factors like performance metrics, environmental complexity, and specific RL algorithms used. It also discusses challenges in this field, such as dealing with complex state spaces and balancing exploration and exploitation. The review provides valuable insights into the current capabilities and limitations of RL in autonomous navigation, highlighting the need for further research to create more reliable and efficient systems.[2]
Deepti Sehrawat, Nasib Singh Gill has published a paper entitled “Smart Sensors: Analysis of Different Types of IoT Sensors”. In this paper Overview of IoT Sensors: The paper categorizes IoT sensors into different groups based on their functionality and the types of phenomena they detect, such as temperature, chemical composition, and various environmental factors. Sensor Applications: It explores the diverse range of applications for these sensors across various industries, such as agriculture, healthcare, environmental monitoring, and industrial automation. The paper emphasizes how these sensors contribute to the development of smarter and more efficient systems. Sensor Phenomena and Characterization: The authors delve into the technical aspects of sensor operation and their integration into larger IoT systems. This includes examining their response characteristics, accuracy, and the challenges associated with deploying them in real-world scenarios. Intelligent Sensors: A significant focus is placed on the advancement of intelligent sensors, which not only collect data but also possess the capability to process and analyze data at the edge. This enhances the responsiveness and efficiency of IoT systems. Impact on IoT Ecosystems: The paper assesses the impact of advanced sensor technology on the expansion and effectiveness of IoT ecosystems, underscoring the crucial role of sensors in realizing the full potential of IoT. Future Trends: The authors discuss forthcoming trends in sensor development, such as sensor miniaturization, enhancements in energy efficiency, and the integration of artificial intelligence capabilities directly into sensor units.[3]
Arman Raj SCSE, Galgotias University, Greater Noida, India ; Vandana Sharma; Seema Rani; Ankit Kumar Shanu; Ahmed Alkhayyat; Rahul Dev Singh has published a paper entitled “Modern Farming Using IoT-Enabled Sensors For The Improvement Of Crop Selection”. This paper explores about IoT-Enabled Sensors in Agriculture: The study discusses the deployment of various IoT-enabled sensors in agricultural settings, including mechanical sensors, temperature sensors, airflow sensors, and dielectric sensors. These sensors collect data related to soil moisture, temperature, and other environmental factors that are critical for crop growth. Improvement of Crop Selection: The core objective of the research is to demonstrate how the data collected from these sensors can be analyzed to make informed decisions about crop selection. This involves choosing the most suitable crops based on the specific conditions of the soil and local climate, thereby optimizing agricultural output. Data Collection and Analysis: The paper details the methodologies used for data collection and analysis, emphasizing the role of IoT in facilitating real-time data acquisition and processing. This capability allows for dynamic adjustments in farming strategies based on current environmental conditions. Impact on Smart Farming: The research highlights the impact of IoT sensors on smart farming practices, noting improvements in efficiency, yield, and resource management. The use of advanced sensors helps in precisely assessing the needs of crops, leading to better water management, nutrient application, and overall farm management. Sociological and Environmental Considerations: The paper also touches on the sociological impacts of implementing IoT in agriculture, such as the potential changes in labor dynamics and the enhancement of sustainable farming practices. It discusses how technology can aid in achieving more environmentally friendly farming methods.[4]
III. DESIGN
A. Mechanical Design
The mechanical design of the agricultural field monitoring robot plays a crucial role in its functionality, durability, and efficiency in navigating in indoor farm field. In this section, we delve into the key aspects of the mechanical design of the Agricultural field monitoring robot.
The robot utilizes a 4WD Smart Robot Car Acrylic Chassis Kit, which offers a sturdy yet lightweight structure made from high-quality acrylic. This material choice ensures durability and ease of maintenance, which is crucial for agricultural applications. The chassis is equipped with four high-quality plastic wheels with rubber grips, each powered by a dual-shaft 100 RPM BO Gear Motor. This setup provides the robot with sufficient torque and speed to navigate different types of surfaces effectively. The robot is powered by a 2-AAA battery holder, ensuring that it has a reliable and easily replaceable power source. This choice supports extended operational periods in the field without the need for frequent recharging. The chassis design includes multiple mounting holes and a double-layer structure, allowing for easy customization with various sensors and tools. This feature is critical for adapting the robot to perform specific tasks such as soil sampling or crop monitoring. The chassis kit is designed for easy assembly and disassembly, promoting modularity. This allows for quick repairs, upgrades, and customization, adapting to different agricultural needs or experimental setups.
B. IoT Platform Design
The ESP8266 microcontroller serves as the heart of the IoT platform. It provides WiFi connectivity, allowing the robot to communicate with a central server or directly with a user interface. The platform integrates various sensors, including soil moisture sensors, to collect data relevant to farming activities. These sensors provide real-time data that is essential for precision agriculture, such as determining the optimal times for 10 watering or assessing soil health. The ESP8266 is capable of handling multiple data inputs from the sensors. It processes this data locally and can also send it to a cloud platform for further analysis, enabling decision-making based on comprehensive data analysis. The IoT platform includes a user interface, likely developed on the Blynk platform, which allows users to monitor and control the robot remotely. This interface displays real-time data, sends controls to the robot, and allows for manual override if necessary. The IoT platform is designed to be energy efficient, with power management protocols in place to ensure that the microcontroller and sensors operate optimally for extended periods. Given the outdoor and potentially remote deployment, the platform incorporates security measures to protect data transmission. It also features robust error handling and recovery protocols to ensure reliability.
C. Electronics
In this project, a comprehensive array of components was employed to achieve the required functionality. At the heart of the system is the Arduino Uno Rev3, a widely-used microcontroller board that serves as the primary control unit. To monitor environmental conditions, a DHT11 temperature and humidity sensor module was integrated, providing essential data on atmospheric conditions. Additionally, a soil moisture sensor was used to assess soil conditions, crucial for applications involving plant growth or irrigation systems. For wireless communication, the project utilized a NodeMCU ESP8266 module, which enables seamless connectivity with other devices. Mechanical movements were facilitated by a 150 RPM single shaft BO motor, which was controlled via an L293D motor driver shield. Circuit connections were streamlined using a mini breadboard and jumper cables. The system was powered by a 3.7V 1200mAh lithium-ion rechargeable cell. Precision in movement was achieved with an SG90 mini servo motor, known for its reliability in small-scale applications. Distance measurement was handled by an HC-SR04 ultrasonic sensor, which is effective in detecting objects and measuring distances up to 400 cm. For motion detection, a PIR motion sensor HCSR501 was incorporated. The project also included an HC05 Bluetooth module for additional wireless communication capabilities, and an LCD1602 display to output data and information to users. Ensure that each component's role is clearly linked to the objectives of your project, and consider adding citations or references to relevant literature to support the use of these components in your specific application.
IV. METHODOLOGY
A. Remote Control Mode Of Operation
The remote control mode flowchart is simpler and focuses on manual control. The process starts with system initialization and a check for Bluetooth connectivity. Once connected, the system waits to receive commands via Bluetooth. Upon receiving a command, the system processes it and executes the corresponding movement. After executing the movement, the system waits for the next command. This mode is suitable for scenarios where manual control is preferred, allowing the user to directly control the robot's actions via Bluetooth.
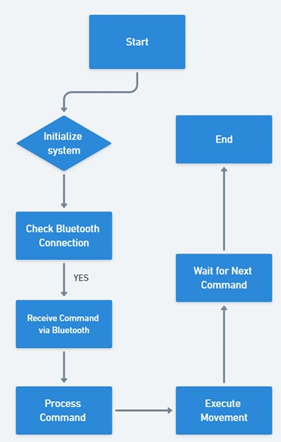
Fig. 1 Flowchart of Remote mode of operation
B. Autonomous Mode Of Operation
In the autonomous mode flowchart, the process begins with the system initialization, followed by a check for Bluetooth connectivity. If a Bluetooth connection is established, the system receives commands via Bluetooth, processes these commands, and executes the corresponding movements. The robot then uses an ultrasonic sensor to check for obstacles. If no obstacles are detected, the robot continues its movement. If an obstacle is detected, the robot executes an avoidance maneuver to navigate around it. The system also includes steps for storing and retrieving commands in/from EEPROM, which allows the robot to memorize and execute stored paths. This autonomous mode enables the robot to navigate and perform tasks with minimal human intervention, enhancing its utility in precision farming.
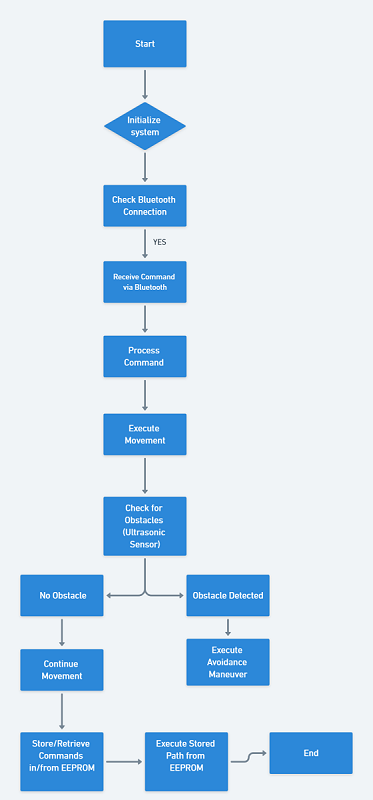
Fig. 2 Flowchart of Autonomous mode of operation
C. Iot system
The smart irrigation system's IoT component operates by integrating sensor data collection with the Blynk platform for remote monitoring and control.
Here's the process:
- Sensor Data Collection: Using an ESP8266 microcontroller, the system connects various sensors, like soil moisture sensors. The ESP8266 reads soil moisture levels through analogRead().
- Sending Data to Blynk: Collected sensor data is sent to the Blynk platform using Blynk.virtualWrite(). This transmits data to a specific virtual pin in the Blynk app. The ESP8266 communicates with the Blynk server over Wi-Fi for real time data transfer.
- Blynk App Configuration: Users configure a project interface on the Blynk platform with widgets tied to virtual pins. These widgets display real-time sensor data, enabling remote soil moisture monitoring. Widgets like gauges and charts can be added for effective data visualization.
- Manual Override and Remote Control: Users have the option to manually override the automated system and control the water pump directly from the Blynk app. By using a button widget linked to the relay's virtual pin, users can remotely turn the water pump on or off, offering flexibility in irrigation management.
- Timers and Event-Based Control: To avoid overwhelming the Blynk server with excessive data, the system employs timers to send sensor readings at controlled intervals. This strategy balances real-time monitoring with efficient data transmission.
In essence, the IoT component of the project utilizes the ESP8266 microcontroller for soil moisture data collection and communication with the Blynk platform. This setup enables real-time monitoring, automated irrigation based on soil moisture levels, and user-friendly manual control via a mobile app interface.
V. TESTING AND RESULTS
A. Testing
The sensors consistently exhibited a variance of ±3% when compared to manual moisture measurements, demonstrating high reliability. The system promptly detected and responded to artificially induced dry conditions within a span of 2 minutes. Upon detecting low moisture levels, the system initiated irrigation pump activation with an average delay of 5 seconds. The distribution of water was uniform, evidenced by post-irrigation soil moisture readings displaying consistent moisture levels across the test area. The Blynk app accurately displayed real-time data and facilitated manual override of automated settings without noticeable delay. Users seamlessly adjusted moisture thresholds and irrigation schedules through the app interface. The system operated continuously without experiencing any failures. Power consumption logs indicated efficient energy usage, with minimal power consumption by the Arduino and sensors. Throughout the test period, the system maintained stable operation without encountering resets or disconnections.
B. Results
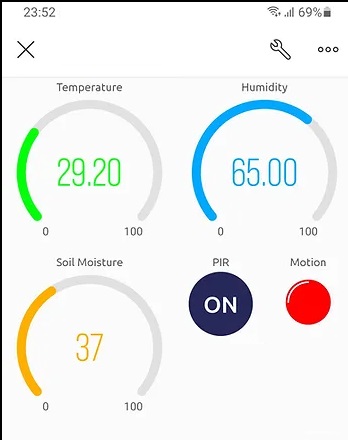
Fig. 1 Blynk interface showing reading of sensors
- The robot is able to move in agricultural indoor farming field.
- The robot is able to memorize the path in which it has travelled with a command.
- The robot is able to avoid obstacles in smart mode.
- The robot is able to measure soil moisture, humidity, temperature, and motion detection.
- The robot is able to send data from sensors to Iot platform called BlynkIot and displays soil moisture, humidity and temperature values in mobile application.
- The robot is able to detect sudden motion and send notification to mobile.
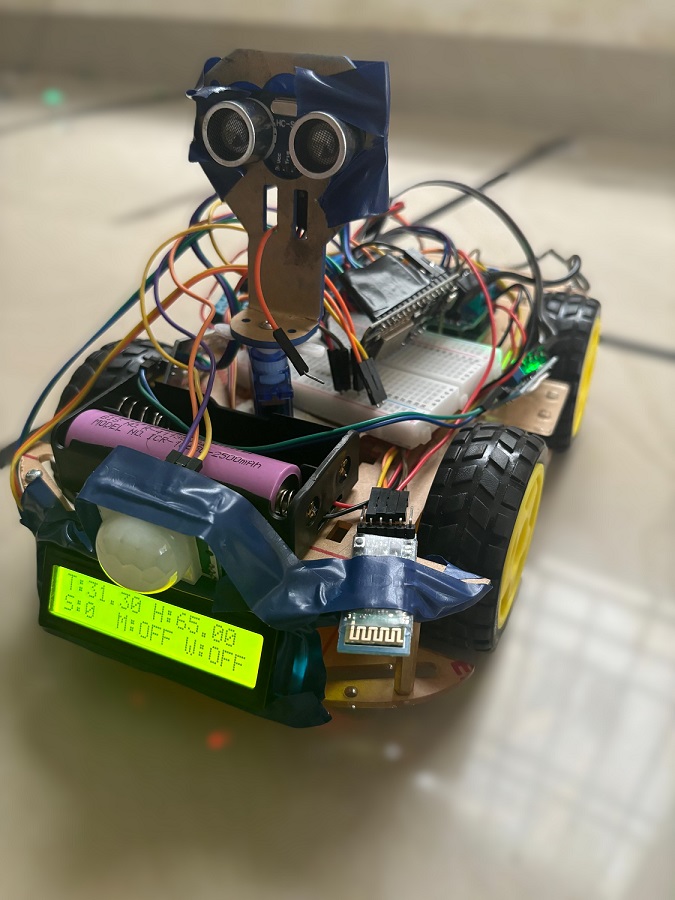
Fig. 4 Agricultural field monitoring robot
Conclusion
In conclusion, this project marks a significant advancement in the realm of smart agriculture, demonstrating the potential of IoT and robotics in enhancing efficiency, productivity, and sustainability in farming practices. The robot\'s autonomous navigation, path memorization, and intelligent interaction with its surroundings underscore the transformative impact of automation in agricultural domains. Furthermore, the successful transmission of vital environmental data to a mobile application through the Blynk IoT platform not only empowers farmers to monitor and respond promptly to their crops needs but also opens avenues for remote farm management.
References
[1] Ahmed.N, D. De and I. Hussain, \"Internet of Things (IoT) for Smart Precision Agriculture and Farming in Rural Areas,\" in IEEE Internet of Things Journal, vol. 5, no. 6, pp. 4890-4899, Dec. 2018, doi: 10.1109/JIOT.2018.2879579. [2] Almazrouei.K, I. Kamel, and T. Rabie, \"Dynamic Obstacle Avoidance and Path Planning through Reinforcement Learning,\" Appl. Sci., vol. 13, no. 8174, 2023. DOI: 10.3390/app13148174. S. Zhang, C. Zhu, J. K. O. Sin, and P. K. T. Mok, “A novel ultrathin elevated channel low-temperature poly-Si TFT,” IEEE Electron Device Lett., vol. 20, pp. 569–571, Nov. 1999. [3] Khawla Almazrouei, I. Kamel, and T. Rabie, “Dynamic Obstacle Avoidance and Path Planning through Reinforcement Learning,” Applied sciences, vol. 13, no. 14, pp. 8174–8174, Jul. 2023, doi: https://doi.org/10.3390/app13148174. [4] Raj, V. Sharma, S. Rani, A. K. Shanu, A. Alkhayyat and R. D. Singh, \"Modern Farming Using IoT-Enabled Sensors For The Improvement Of Crop Selection,\" 2023 4th International Conference on Intelligent Engineering and Management (ICIEM), London, United Kingdom, 2023, pp. 1-7, doi: 10.1109/ICIEM59379.2023.10167225. [5] Sehrawat.D and N. S. Gill, \"Smart Sensors: Analysis of Different Types of IoT Sensors,\" 2019 3rd International Conference on Trends in Electronics and Informatics (ICOEI), Tirunelveli, India, 2019, pp. 523-528, doi: 10.1109/ICOEI.2019.8862778.
Copyright
Copyright © 2024 Padala Yeswanth Reddy, Sudharshan G, Mohith V. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET63911
Publish Date : 2024-08-08
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online