

Ijraset Journal For Research in Applied Science and Engineering Technology
AI-ACCIDENT-EYE
Authors: Mayuresh Kulkarni, Anuj Jadhav, Anjali Kotgire, Prof. T. G. Hampe
DOI Link: https://doi.org/10.22214/ijraset.2024.64716
Certificate: View Certificate
Abstract
Due to the sheer rise in vehicle accidents, there is an increasing demand for effective early vehicle crash detection and alert systems. We propose a vehicle crash detection system with sophisticated components such as raspberry pi, sensors, APIs, web browser automation and communication modules to improvise vehicle crash detection performance. The existing concept presents extreme Gradient Boosting, a Machine Learning approach for identifying accidents utilizing a set of real time data. Working on this method considering single dataset such as upstream and downstream averages, results in a lower efficiency. While most existing vehicle crash detection systems depend on single modal data, our proposed vehicle crash detection system uses an ensemble machine learning model based on multi modal data such as accelerometer, gyroscope, and shock sensor data. In order to verify that an accident has happened, a message is sent to the user, if the user does not respond to the call within 30 seconds, our detection system immediately conveys the exact location of the accident occurred to the nearest hospital within 82 seconds via voice message. Also another voice message enclosing the information about the location of the accident along with the hospital name will be sent to the trusted person specified by the user. The experimental results indicate that the proposed vehicle crash detection system performs significantly better than single classifiers. With the help of this application, we preserve the state of humanity and generate harmony in our society.
Introduction
I. INTRODUCTION
Vehicles play a significant role in global transportation. Every day, there are numerous examples of traffic accidents worldwide. A car runs into another car, a pedestrian, an animal, or another stationary object like a structure or tree., to cause a traffic collision, sometimes referred to as an automobile accident, car crash. Traffic accidents frequently cause monetary costs to society and the environment, as well as physical damage injured, disabled, or killed parties. Road travel is the most dangerous situation that people regularly confront, but the number of fatalities from such incidents receives less public attention than that of other, less frequent types of accidents disaster
The Vehicle Collision Detection and Alert System using Deep Learning is one such solution that uses deep learning algorithms to detect and prevent vehicle collisions. This system employs object detection algorithms, such as You Only Look Once (YOLO), to identify the presence of vehicles on the road.
Vehicle collision detection and alert systems using data science are innovative technologies that aim to lessen the amount of road accidents by leveraging the power of data analytics and machine learning. These systems use a combination of sensors, cameras, and other data sources to collect and process real - time data on vehicle movements, speed, and proximity to other objects on the road.
The data is then analyzed using advanced algorithms and statistical models to identify potential collision scenarios and alert drivers or autonomous systems to take appropriate actions to avoid accidents.
II. LITERATURE SURVEY
1) Yeong-Kang Lai, Chu-Ying Ho, Yu-Hau Huang, Chuan-Wei Huang , Yi-Xian Kuo, and Yu-Chieh Chung Department of the Electrical Engineering, National Chung Hsing University, Taichung , Taiwan, R.O.C yklai@dragon.nchu.edu.tw
In this paper, we demonstrate and evaluate a method to perform real-time object detection with unmanned vehicle using the state of the art, MobileNets, with object detection algorithm running on an NVIDIA Jetson TX2, an GPU platform targeted at power constrained mobile applications that use neural networks under the hood. This, as a result of comparing several cutting edge object detection algorithms. Multiple evaluations we present provide insights that help choose the optimal object detection configuration given certain frame rate and detection accuracy requirements. We propose how this setup running on-board a unmanned vehicle can be used to process a video feedback during emergencies in real-time, and feed a decision support warning system using the generated detections.
2) Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D., Wang, W., Weyand, T., ... & Adam, H. (2017). “Mobilenets: Efficient convolutional neural networks for mobile vision applications.” arXiv preprint arXiv:1704.04861. J. Clerk Maxwell, A Treatise on Electricity and Magnetism, 3rd ed., vol. 2. Oxford: Clarendon, 1892, pp.68–73..
This paper presents the automated waste classification using deep learning techniques, which addresses limitations of traditional waste management method. The paper reviews significant improvements by Convolutional Neural Network (CNN), which includes models like Faster R-CNN and ResNet-50, which had improved classification accuracy and also enabled real-time processing. It also discusses object detection algorithms like YOLO and SSD which improves detection capabilities. Additionally, it also highlights importance of engaging citizen through real-time waste classification system for promoting waste disposal. The study demonstrates transition from the conventional approaches to cutting-edge deep learning methods, indicating future advancements should prioritize mobile-based system to promote public awareness in waste classification.
3) N. Dalal and B. Triggs. “Histograms of oriented gradients forhuman detection.” In Computer Vision and Pattern Recognition,2005. CVPR 2005. IEEE Computer Society Conferenceon, volume 1, pages 886 893. IEEE, 2005.
Liu et al. (2021) had presented the deep learning framework for waste classification and management, which addressed challenges of urban waste. The authors deferred traditional sorting methods and insisted for use of Convolutional Neural Network (CNN), to automate waste classification, highlighting the accuracy over conventional methods. By using extensive dataset and various preprocessing methods, the classification accuracy improves a lot with CNN based approach. However, the paper also has limitations like it’s reliance on specific dataset that don’t fully represent diversity of types of waste in various geographical regions. The results focus on potential for integrating the deep learning technologies into waste management system to improve efficiency and recycling processes, which calls for further research to look into these limitations and explore real-world applicability.
IIII. METHODOLOGY
The methodology of AI-ACCIDENT EYE using the YOLO (You Only Look Once) algorithm for accident detection involves several key steps, from data preparation to model deployment. Here is an outline of the typical process:. The following steps were undertaken:
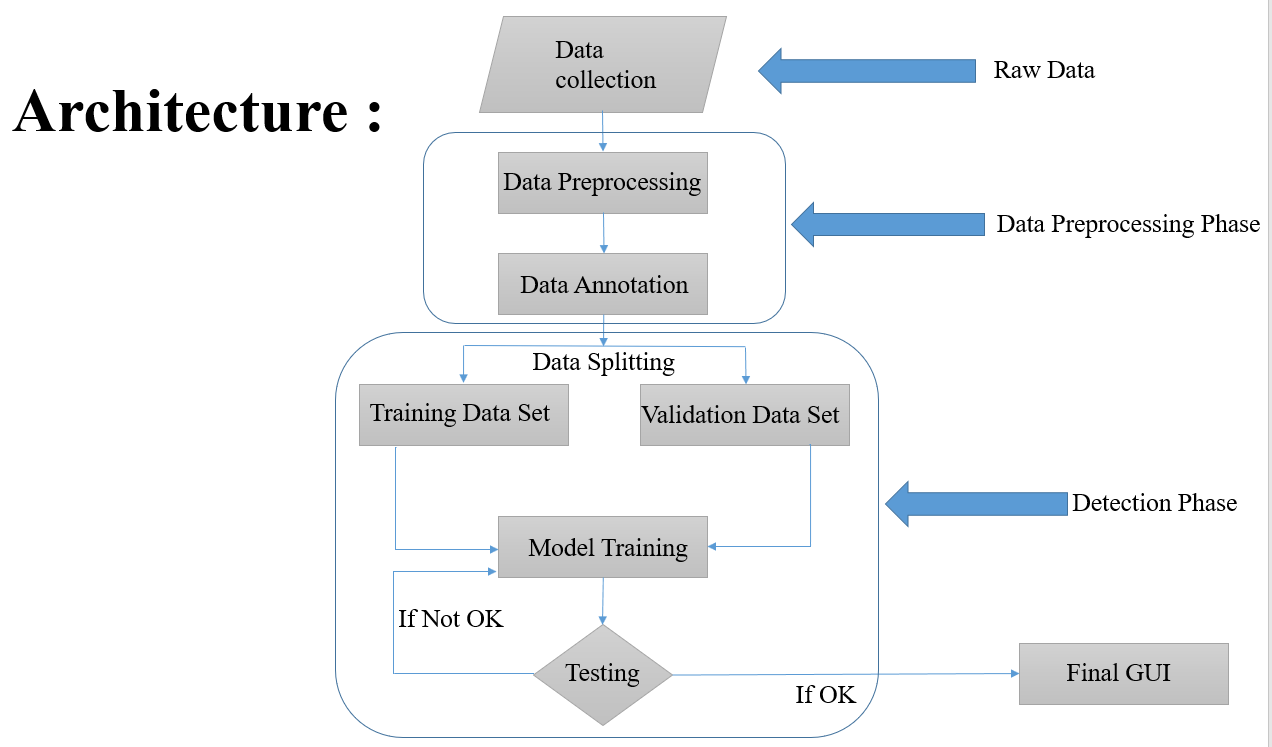
- Data Collection: The process starts by gathering relevant raw data from various sources, which serves as the foundation for model development.
- Data Preprocessing: The raw data is cleaned and transformed to remove inconsistencies, noise, and irrelevant information, ensuring the data is suitable for analysis.
- Data Annotation: The preprocessed data is labeled to create a supervised learning environment. This step is crucial for models that require labeled data to learn patterns and make predictions.
- Data Splitting: The annotated data is split into two subsets: the Training Data Set for learning and the Validation Data Set for evaluating the model's performance and avoiding overfitting.
- Model Training: The model is trained using the training data, learning the underlying patterns and relationships between the input data and the labels.
- Testing and Validation: The trained model is tested on the validation dataset to assess its performance. If the model fails to meet desired accuracy or performance metrics, it is sent back for additional training and tuning.
- Detection Phase: Once the model is validated successfully, it is deployed in the detection phase where it can make predictions or classifications on new, unseen data.
- Final GUI Integration: The trained model is integrated into a graphical user interface (GUI) to provide an interactive platform for users to access and utilize the model's detection capabilities in real-time.
IV. SYSTEM ARCHITECTURE
The architecture shows a machine learning process, starting with Data Collection of raw data. It undergoes Preprocessing and Annotation, preparing it for use. Next, the data is split into Training and Validation Sets for model development. The Model Training phase is followed by Testing to ensure accuracy. If the model is not satisfactory, it goes through more training. Once approved, it enters the Detection Phase and is integrated into a Final GUI for end-users. The workflow emphasizes iterative improvement and validation before deployment.
Conclusion
In conclusion, This system enhances road safety and emergency response, making travel smoother and reducing risks on the road. By utilizing AI and ML, it significantly improves traffic management and public safety.
References
[1] Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D., Wang, W., Weyand, T., ... & Adam, H. (2017). “Mobilenets: Efficient convolutional neural networks for mobile vision applications.” arXiv preprint arXiv:1704.04861. J. Clerk Maxwell, A Treatise on Electricity and Magnetism, 3rd ed., vol. 2. Oxford: Clarendon, 1892, pp.68–73. [2] S. Ioffe and C. Szegedy. Batch normalization: “Acceleratingdeep network training by reducing internal covariate shift.” arXiv preprint arXiv:1502.03167, 2015. [3] P. Viola, M. J. Jones, and D. Snow. “Detecting pedestriansusing patterns of motion and appearance.” In null,.IEEE, 2003, page 734. [4] P. Felzenszwalb, D. McAllester, and D. Ramanan. “A discriminativelytrained, multiscale, deformable part model.”In Computer Vision and Pattern Recognition, 2008. CVPR2008. IEEE Conference on, pages 1–8. IEEE, 2008. [5] N. Dalal and B. Triggs. “Histograms of oriented gradients forhuman detection.” In Computer Vision and Pattern Recognition,2005. CVPR 2005. IEEE Computer Society Conferenceon, volume 1, pages 886 893. IEEE, 2005. [6] P. Doll´ar, R. Appel, S. Belongie, and P. Perona. “Fast featurepyramids for object detection.” IEEE Trans. Pattern Anal. Mach. Intell., 2014.
Copyright
Copyright © 2024 Mayuresh Kulkarni, Anuj Jadhav, Anjali Kotgire, Prof. T. G. Hampe. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET64716
Publish Date : 2024-10-21
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online