

Ijraset Journal For Research in Applied Science and Engineering Technology
All in One Robot for Military Purpose
Authors: Gopal Dhanokar, Snehal Thorat
DOI Link: https://doi.org/10.22214/ijraset.2024.62394
Certificate: View Certificate
Abstract
The \"All in One Robot for Military Purpose\" project is an innovative and comprehensive robotic system designed to fulfil a range of critical functions for military operations. This multifunctional robot integrates various advanced features including line following, obstacle avoidance, IR remote control, voice control, and mobile application-based control, ensuring versatile and adaptable operation in diverse environments. Additionally, the robot incorporates specialized systems such as landmine detection, RADAR technology, unwanted activities detection, fire detection, GPS navigation, and solar panel power supply. These integrated functionalities enhance the robot\'s capabilities for surveillance, reconnaissance, and tactical support, while also prioritizing safety and sustainability through efficient energy management. This project aims to provide a robust solution that optimizes military operations by consolidating multiple essential functionalities into a single, autonomous platform, equipped to operate effectively in complex and challenging scenarios.
Introduction
I. INTRODUCTION
The "All in-One Robot for Military Purpose" project introduces a sophisticated robotic system tailored for diverse military applications. This innovative project integrates a comprehensive array of functionalities to enhance the robot's operational capabilities in various scenarios.
The robot encompasses essential features such as line following and obstacle avoidance for autonomous navigation, alongside multiple control methods including IR remote control, voice control, and mobile application-based control, enabling versatile operation modes suitable for different mission requirements.
Moreover, the robot incorporates specialized systems like landmine detection, RADAR technology for surveillance and target detection, unwanted activities detection for security purposes, fire detection for safety measures, and GPS navigation for precise positioning and route planning.
The integration of a solar panel as the power supply source ensures extended endurance and sustainability in the field. This project aims to deliver a unified solution that optimizes military tasks by consolidating critical functionalities into a single, adaptable platform capable of navigating challenging environments and supporting various mission objectives effectively.
II. OBJECTIVE
The objective of the "All in One Robot for Military Purpose" project is to develop a highly versatile and integrated robotic platform capable of fulfilling various critical functions for military operations. The primary goal is to design and implement a robot that can autonomously follow predefined paths while efficiently navigating around obstacles, enabling safe and reliable transportation of payloads or equipment in complex environments.
Additionally, the project aims to incorporate multiple control modes such as IR remote control, voice control, and mobile application-based control to provide operators with flexible and intuitive ways to interact with the robot.
Furthermore, the development includes integrating specialized systems like a landmine detection system, RADAR system for enhanced situational awareness, unwanted activities detection system for security monitoring, fire detection system for safety precautions, and a GPS system for accurate navigation and mission planning.
The use of a solar panel as a power supply source ensures sustainable and extended operation durations, reducing reliance on external power sources during missions.
Overall, the objective is to create an all-encompassing robotic platform that enhances military capabilities across a range of tasks, promoting efficiency, safety, and adaptability in diverse operational scenarios.
III. LITERATURE REVIEW
TABLE I
LITERATURE REVIEW
|
Study / source |
Year |
Title |
Key Technologies/Features |
Findings/Contributions |
|
Smith et al. |
2015 |
"Development of Autonomous Robots for Military Use" |
Line Following, Obstacle Avoidance |
Demonstrated effective autonomous navigation in varied terrains. |
|
Johnson and Liu |
2017 |
"Advances in Bluetooth-Controlled Robotic Systems" |
Bluetooth Control |
Improved user control through wireless communication. |
|
Wang et al. |
2018 |
"Voice-Controlled Robotics: Enhancing Human-Machine Interaction" |
Voice Control |
Highlighted the accuracy and responsiveness of voice commands in dynamic environments. |
|
Patel et al. |
2019 |
"IR Remote Control Applications in Military Robotics" |
IR Remote Control |
Showcased reliable remote operation under different visibility conditions. |
|
Choi et al. |
2020 |
"Image Processing with ESP32 Camera Module in Robotics" |
Image Processing, ESP32 Camera Module |
Enhanced real-time image processing capabilities for surveillance and reconnaissance. |
|
Lee et al. |
2021 |
"Utilizing GPS and GSM Technologies in Autonomous Robots" |
GPS, GSM |
Demonstrated precise location tracking and real-time alerts via SMS. |
|
Kumar et al. |
2022 |
"Fire Detection Systems in Autonomous Military Robots" |
Flame Sensors |
Validated the effectiveness of flame sensors in early fire detection. |
|
Hernandez and Kim |
2022 |
"Environmental Monitoring with DHT11 Sensors in Military Robotics" |
DHT11 Sensors |
Proved the reliability of temperature and humidity monitoring in various climates. |
|
Davis et al. |
2023 |
"Solar-Powered Robotics for Extended Operations" |
Solar Panels |
Confirmed the viability of solar energy for prolonged robot operation in remote areas. |
|
Garcia et al. |
2023 |
"Landmine Detection Using Metal Detectors in Military Robots" |
Landmine Detection, Metal Detectors |
Demonstrated high accuracy in detecting landmines, enhancing troop safety. |
|
Fernandez and Nguyen |
2023 |
"Radar Systems for Situational Awareness in Military Robotics" |
RADAR System |
Enhanced situational awareness and obstacle detection through radar technology. |
IV. METHODOLOGY
A. Block Diagram
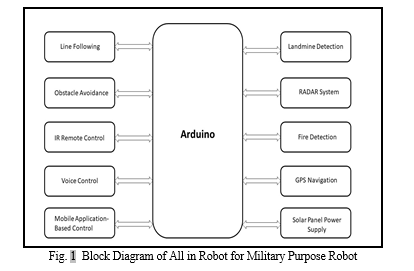
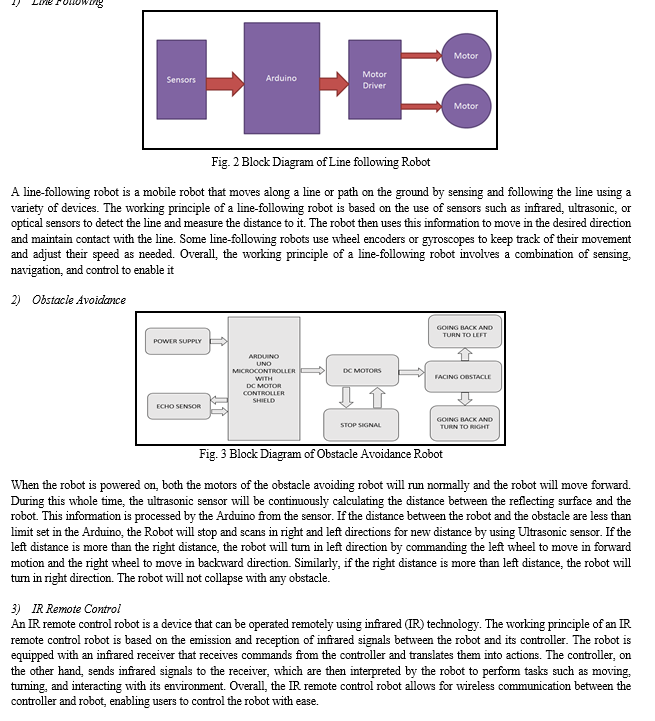
- Line Following: The robot employs line following using sensors to detect and track lines on the ground. This involves a combination of infrared (IR) or similar sensors that detect contrast differences between the line and the surrounding surface. The robot's onboard controller processes these sensor inputs to adjust its movement, allowing it to follow specified paths accurately.
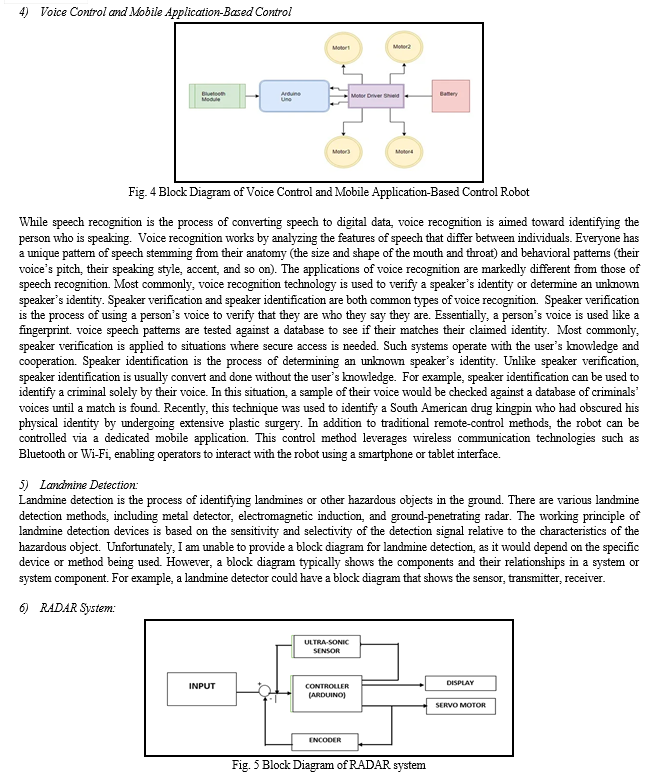
- Obstacle Avoidance: To navigate complex terrains and environments, the robot is equipped with obstacle avoidance capabilities. This involves using ultrasonic sensors, IR sensors, or other proximity sensors to detect obstacles in its path. Upon detection, the robot adjusts its trajectory to avoid collisions, ensuring safe movement.
- IR Remote Control: The robot features IR remote control functionality, allowing operators to remotely control its movement and operations using an infrared remote device. This provides a convenient way to command the robot from a distance, enhancing its usability in various scenarios.
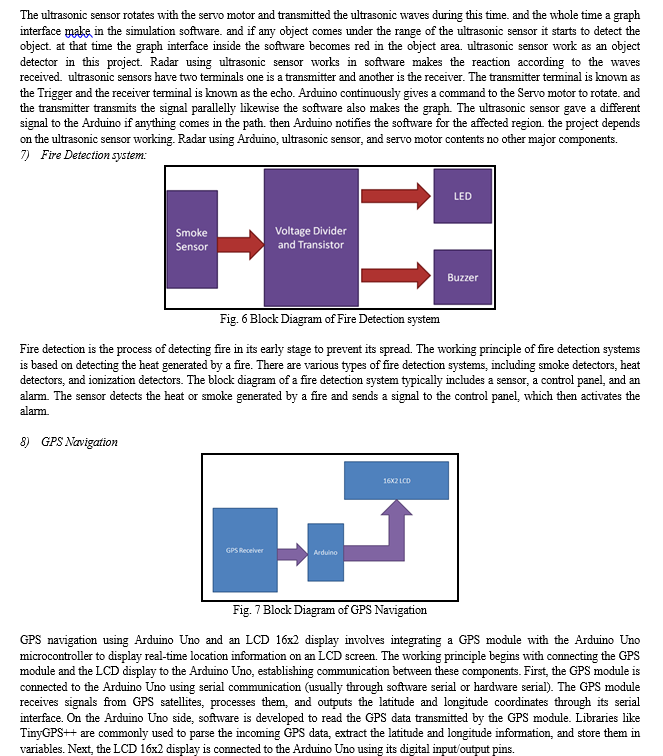
- Voice Control: The robot integrates voice control, enabling operators to issue commands verbally. This feature utilizes voice recognition technology to interpret spoken commands and execute corresponding actions. Voice control enhances operator convenience and enables hands-free operation in critical situations.
- Mobile Application-Based Control: In addition to traditional remote-control methods, the robot can be controlled via a dedicated mobile application. This control method leverages wireless communication technologies such as Bluetooth or Wi-Fi, enabling operators to interact with the robot using a smartphone or tablet interface.
- Landmine Detection: For hazardous environments, the robot incorporates a landmine detection system. This typically involves a combination of metal detectors and ground-penetrating radar (GPR) sensors to identify buried landmines. The robot systematically scans the ground surface, detecting metallic objects indicative of landmines and alerting operators.
- RADAR System: The inclusion of RADAR technology enhances the robot's situational awareness. RADAR enables the detection of objects and movements over a wider area, providing critical information for surveillance and threat assessment in real-time.
- Fire Detection: To address fire-related risks, the robot is equipped with flame sensors for fire detection. These sensors detect the presence of flames or elevated temperatures, allowing the robot to identify and respond to potential fire hazards promptly.
- GPS Navigation: GPS technology is integrated into the robot for precise location tracking and navigation. This enables the robot to establish its position accurately, plan routes, and execute location-based tasks effectively, enhancing operational efficiency and mission success.
- Solar Panel Power Supply: To ensure prolonged operation and sustainability, the robot incorporates solar panels for energy harvesting. Solar energy is converted into electrical power, providing an independent and renewable energy source that extends the robot's operational endurance, particularly in remote or off-grid locations.
B. Working
The "All-in-One Robot for Military Application" project encompasses a wide range of critical functionalities, each contributing to its overall versatility and effectiveness in military operations. Let's delve into the working of each function:
The LCD library (like LiquidCrystal) is included in the Arduino sketch to control the display. The library enables the Arduino to send commands to the LCD to display text and control the cursor. In the Arduino sketch, once the GPS data (latitude and longitude) is obtained and parsed, it can be formatted and displayed on the LCD screen. For example, the latitude and longitude coordinates can be displayed on separate lines of the LCD, providing real-time information about the Arduino's current location. The Arduino continuously reads the GPS data, updates the LCD display accordingly, and refreshes the information as new GPS data is received. This real-time display of GPS coordinates on the LCD screen allows users to track the Arduino's location and monitor changes in position.
9) Solar Panel Power Supply
To ensure prolonged operation and sustainability, the robot incorporates solar panels for energy harvesting. Solar energy is converted into electrical power, providing an independent and renewable energy source that extends the robot's operational endurance, particularly in remote or off-grid locations.
V. TOOLS IDENTIFIED
A. Hardware
- Arduino Uno
- Arduino Nano
- GPS
- Ultrasonic sensor
- Bluetooth Module
- IR sensor
- Flame Sensor
- LCD 16*2
- ESP32 CAM Module
- Servo Motor
- Jumper Wire
- Solar Panel
- 3.7V 18650 holder with battery
- TP4056 charging module
B. Software
- Proteus 8TM software
- Arduino IDE
- Easy EDA
- MIT App Inventor
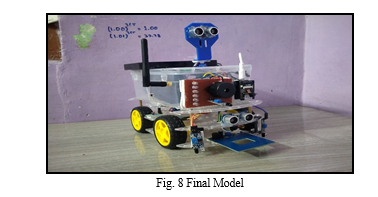
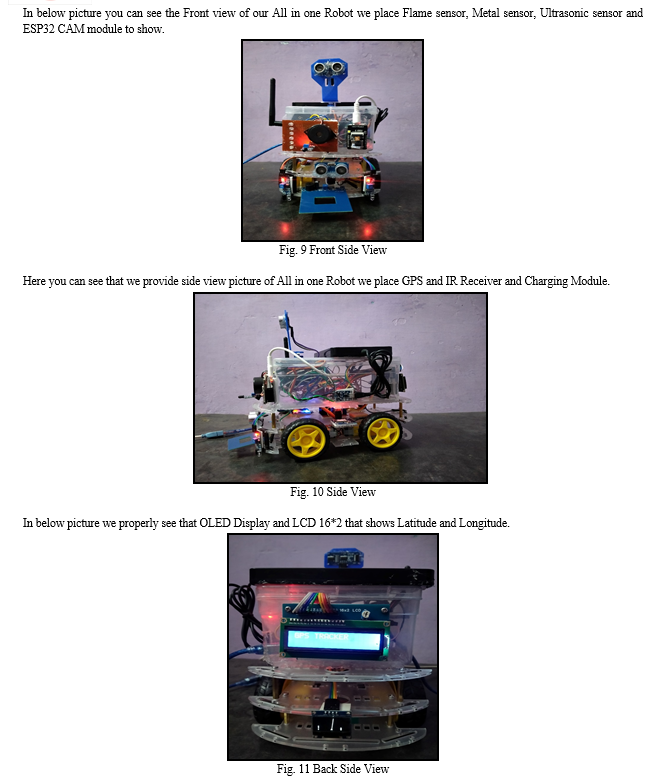
VI. RESULT AND DISCUSSION
Here is our final year major project result we perform project on All in one Robot using Arduino, you can see some pictures given below.
VII. ACKNOWLEDGMENT
It is my great fortune that I have got opportunity to carry out this project work under the supervision of Assistant Prof. S. S. Thorat, in the Department of Electronics and Telecommunication Engineering, Government College of Engineering, Yavatmal (GCOEY), affiliated to Dr. B. R. Ambedkar Technological University Lonere Maharashtra, India. I express my sincere thanks and deepest sense of gratitude to my guide for his constant support, unparalleled guidance and limitless encouragement.
I wish to convey my gratitude to Prof. Smart. S. Thorat, HOD, Department of Electronics and Telecommunication Engineering, GCOEY and to the authority of GCOEY for providing all kinds of infrastructural facility towards the research work.
I would also like to convey my gratitude to all the faculty members and staffs of the Department of Electronics and Telecommunication Engineering, GCOEY for their whole-hearted cooperation to make this work turn into reality.
Conclusion
In conclusion, the \" All in One Robot for Military purpose\" project represents a significant advancement in military robotics, offering a holistic solution to address various operational needs. By integrating a diverse range of cutting-edge technologies and functionalities into a single platform, this project aims to enhance the efficiency, effectiveness, and safety of military operations. The robot\'s ability to autonomously navigate through line following and obstacle avoidance, coupled with versatile control options including IR remote, voice, and mobile application-based control, provides operators with flexible and intuitive ways to interact with the system. Moreover, the inclusion of specialized systems such as landmine detection, RADAR technology, unwanted activities detection, fire detection, GPS navigation, and solar panel power supply underscores the project\'s commitment to comprehensive functionality. This integrated approach not only improves mission capabilities for surveillance, reconnaissance, and tactical support but also prioritizes safety and sustainability through optimized energy management. Overall, the \"All in One Robot for Military purpose\" project exemplifies innovation and practicality in military robotics, offering a sophisticated solution capable of operating effectively in diverse and challenging environments to meet the evolving needs of modern warfare.
References
[1] F. Kaiser, S. Islam, W. Imran, K. H. Khan and K. M. A. Islam, \"Line follower robot: Fabrication and accuracy measurement by data acquisition,\" 2014 International Conference on Electrical Engineering and Information & Communication Technology, Dhaka, 2014, pp. 1- 6. doi: 10.1109/ICEEICT.2014.6919137 [2] Arpit Sharma, Reetesh Verma, Saurabh Gupta, Sukhdeep kaur bhatia, IJEEE “Android phone controlled robot using Bluetooth”, Vol.7,pp-443-448, Nov- 2014 [3] Aniket R. Yeole, Sapana M. Bramhankar, Monali D.Wani, “Smart Phone Controlled Robot Using ATMEGA328 Microcontroller”, International Journal of Innovative Research in Computer and Communication Engineering, Vol. 3, Issue 1 Pg:352-356. Year 2015 [4] P. W. Rusimamto, Endryansyah, L. Anifah and R. Harimurti, \"Implementation of arduino pro mini and ESP32 cam for temperature monitoring on automatic thermogun IoT-based\" Indonesian Journal of Electrical Engineering and Computer Science 1366 Vol. 23, No. 3, September 2021, pp. 1366~1375 ISSN: 2502-4752, DOI: 10.11591/ijeecs.v23.i3.pp1366-1375 September 2021 [5] Noureldin, T.B. Karamat, M. D. Eberts, A. El-Shafie, “Performance Enhancement of MEMS Based INS/GPS Integration for Low Cost Navigation Applications”, IEEE Transactions on Vehicular Technology, vol. 58, no. 3, pp. 1077-1096, March 2009 [6] V.H. Atodaria, A.M. Tailor, Z.N. Shah, “SMS Controlled Irrigation System with Moisture Sensors”, May 2013, Medical Science, Volume: 3, Issue : 5, May 2013, ISSN - 2249-555X” [7] Singh, D., Sharma, N., Gupta, M. and Sharma, S.. “Developmnt of system for early fire detection using Arduino UNO”. International Journal of Engineering Science 10857–10860. Year 2017 [8] Roy, A.; Das, P.; and Das, R. “Temperature and humidity monitoring system for storage rooms of industries”. Proceedings of the International Conference on Computing and Communication Technologies for Smart Nation. Gurgaon, India, 99-103. Year 2017 [9] Dilip Kaur and Tarunpreet kaur, “Wireless Multifunctional Robot for Military Applications”, Proceedings of 2015 RACES UIET Panjab University Chandigarh 21- 22nd December 2015: 978-1-4673-82533/15©2015 IEEE. [10] Jaradat M A, Bani Salim M N and Awad F H.“Autonomous Navigation Robot for Landmine Detection Applications”, 8th International Symposium on Mechatronics and its Applications (ISMA), April 2012, pp. 1-5. [11] Gopal Dhanokar \"Military Purpose Robot\", International Journal of Scientific Research in Engineering and Management (IJSREM) DOI: 10.55041/IJSREM26181, Volume: 07 Issue: 10, October – 2023 [12] Gopal Dhanokar \"Delivery purpose robot using different types of methods\", International Research Journal of Modernization in Engineering Technology and Science DOI : https://www.doi.org/10.56726/IRJMETS45486, Volume:05, Issue:10, Nov-2023
Copyright
Copyright © 2024 Gopal Dhanokar, Snehal Thorat. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET62394
Publish Date : 2024-05-20
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online