

Ijraset Journal For Research in Applied Science and Engineering Technology
An Assessment of Accurate Range Estimator for Electric Vehicle Applications
Authors: Dinesh Godara, Dr. M.K. Bhaskar, Manish Parihar
DOI Link: https://doi.org/10.22214/ijraset.2024.58685
Certificate: View Certificate
Abstract
The world’s primary modes of transportation are facing two major problems: rising oil costs and increasing carbon emissions. As a result, electric vehicles (EVs) are gaining popularity as they are independent of oil and do not produce greenhouse gases. However, despite their benefits, several operational issues still need to be addressed for EV adoption to become widespread. One of the main obstacles for the acceptance of EV’s is the driver’s fear of being stranded by a depleted battery. In other words, accurate estimation of the remaining SOC is required to provide positive edge towards adoption of EV. In this work, an EV is tested for a drive line cycle of 10 Km for a trip, and key parameters such as elevation, speed, body dynamics, vehicle dimensions, on track speed have been collected. A model of EV power train is developed in MATLAB Simulink from the data logged and a static app is being developed which estimates the vehicle dynamic forces, power consumption, energy utilized for the trip, State of Charge (SOC) and remaining mileage of the vehicle.
Introduction
I. INTRODUCTION
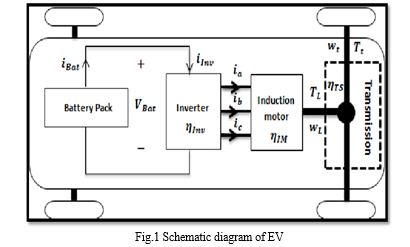
Introduction EVs are one of the most promising technologies for providing energy security and pollution reduction. One of the main obstacles for the acceptance of EVs is the range anxiety. Range anxiety is a driver’s fear of being stranded by a depleted EV battery. From a buyer’s perspective, the uncertainty of the amount of remaining battery capacity to reach the destination remains an uneasy thought. EV architecture is shown in Fig.1. The traction power for a given route needs to be calculated first and it is the sum of the vehicle potential and kinetic energy change, the aerodynamic, and the rolling resistance work. Each of these components is highly dependent on a variety of environmental and behavioural factors. From the traction power, the EV motor output power can be calculated based on the transmission gear ratio and efficiency. Finally the required battery current required by the EV is dependent on the drive system efficiencies, the traffic conditions and the accessory power losses.
The SoC of the EV battery and the vehicle range to destination at each instant of time can be estimated from the battery current required by the EV, the battery voltage, the initial SoC, battery temperature, capacity and efficiency. The proposed SoC estimation takes into account the changes in environmental and the driver’s behavioral factors and the dynamic changes of the losses in the EV components.
II. IMPLEMENTATION OF ACCURATE RANGE ESTIMATION SYSTEM
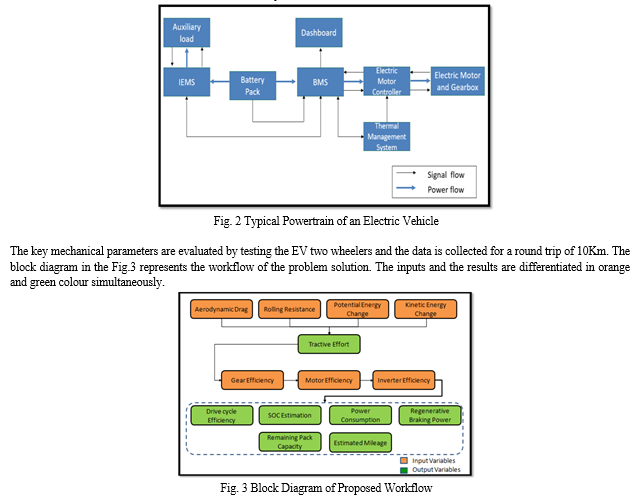
The parameters such as aerodynamic drag, rolling resistance, potential energy and kinetic energy, gear efficiency are mechanical parameters. While the motor and inverter efficiencies correspond to electrical parameters. So, the mechanical parameters are derived from the vehicle specifications and are calculated based on the track route and the velocity of the vehicle. The electrical parameters are evaluated from the data log during the trip course of the vehicle. In order to evaluate the power consumption accurately, the gradient of the track root is evaluated for a distance of 20m at regular intervals of time. The power train architecture of an EV is shown in the Fig.2. The power train consists of four main components 1} Battery pack 2) Battery management system 3) Auxiliary loads, 4) Electric motor and controller 5) Transmission system.
To evaluate the accuracy of range estimation algorithm, the validation is conducted on mathematical model-based analysis and testing basis. Initially, a two-wheeler vehicle is procured for testing over a predetermined track route of about 10 km. The trip route originated from SRS ground, Peenya Industrial area, Bengaluru to the sandal soap factor metro station, Bengaluru, and a round trip back to the origin at an elevation of 800m above sea level. The physical parameters such as, vehicle dimensions, drag coefficients and electrical power train parameters are gathered from the vehicle data sheet specifications provided by manufacturers as shown in table I. In the mathematical modelling phase, a graphical user interface otherwise known as a static app is being developed. The app consists of relevant input variables related to the physical parameters of the vehicle and the track route details. The app is developed in such a way that the range estimation is carried out once the parameters of the vehicle are loaded along with the route details. This is developed using GUIDE (Graphical User Interface Development Environment) in MATLAB.
Table I. EV Parameters
|
S. No |
Parameter |
Value |
|
1 |
Model |
Ampere Zeal |
|
2 |
Frontal Area |
0.65 sq. m |
|
3 |
Wheel Radius |
0.198 m |
|
4 |
Aerodynamic drag coefficient |
0.33 |
|
5 |
Rolling resistance coefficient |
0.0008 |
|
6 |
Rated Motor RPM |
1500 RPM |
|
7 |
Rated Motor Power |
500 W |
|
8 |
Rated Motor Torque |
20 Nm |
|
9 |
Battery Pack Voltage |
72 V |
|
10 |
Battery Pack Capacity |
2.2 kWhr |
|
11 |
Cell Type |
Lithium-ion battery |
|
12 |
Gear Ratio |
1 |
|
13 |
Air Density |
1.2754????????????3 |
|
14 |
Gravity |
9.8 ????????2 |
|
15 |
Mass |
230 Kg |
III. SIMULATION RESULTS
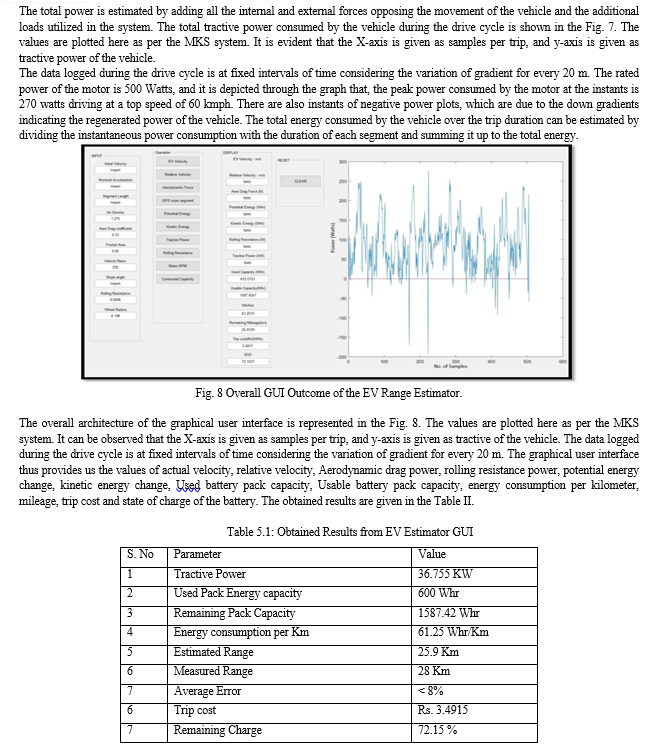
The EV drive parameters are added to the input panel, and the parameters such as speed, distance travelled, elevation, gradient, aerodynamic power, rolling resistance power, vehicle average speed as per the drive cycle, potential energy change and kinetic energy change are evaluated using the graphical user interface built. The aerodynamic power consumption of the EV using the mathematical model, over the drive cycle given in the Fig. 4. The values are plotted here as per the MKS system. It is observed that the X-axis is given as samples per trip, and y-axis is given as power consumption of the vehicle. The data logged during the drive cycle is at fixed intervals of time considering the variation of gradient for every 20 m. It can be seen that the aerodynamic drag is higher during the acceleration period with increase in velocity. The peak instantaneous power consumed by the vehicle during the drive cycle can be seen at 950 watts. The drag coefficient is considered based on the specification’s sheets of the body design.


Conclusion
The Electric Vehicles (EV) is considered to be the best alternatives for the Internal Combustion Engine Vehicles (ICEV’s). The current EV’s provide about 22% driving range when compared to that of ICEV’s. The main drawbacks in EV sector include range anxiety, lack of infrastructure, high initial investments, and inaccurate fuel estimation. Most of the EV drivers reserve 30% of the charge on the dashboard estimation due to the trust issues on the accuracy of the range estimation of production EV’s. In this work, the results obtained by simulating the mathematical model developed in the GUI are displayed. Furthermore, the graphs plotted and power consumption of EV due to various parameters are described in this work. Also, the total power consumption of vehicle during the track route is evaluated and compared with practical results obtained during the test cycle of the EV. An accurate range estimation model of EV is presented. The model is developed by extracting the gradient data at regular intervals of distance. The data logged during the drive cycle is at fixed intervals of time considering the variation of gradient for every 20 m. It can be seen that the aerodynamic drag is higher during the acceleration period with increase in velocity. This method reduced the average error of production unit range estimation by 3%. The battery power consumption is estimated considering time domain losses along the specified route along with the gradient at each interval. The drive system efficiency is assumed to be 90% considering practical considerations. The measured range after the trip is found to be 28 km, while the estimated range is 25.9 km. The SOC calculation is found to be accurate with an error less than 8% between measured and estimated values at destination.
References
[1] Moin Ahmed, Zhiyu Mao, Yun Zheng, Tao Chen and Zhongwei Chen, Electric Vehicle Range Estimation Using Regression Techniques, s. World Electr. Veh. J. 2022, 13, 105. doi.org/ 10.3390/wevj13060105. [2] Ruohan Guo and Weixiang Shen, A Model Fusion Method for Online State of Charge and State of Power Co-Estimation of Lithium-Ion Batteries in Electric Vehicles DOI: 10.1109/TVT.2022.3193735, IEEE Xplore: 25 July 2022. [3] Tianlu Dai, Boya Zhou, Yanyi Zhang, Guang Chen, Peng Liu.Rapid Evaluation Method for Accuracy of Range Estimation of Pure Electric Vehicle Range Estimation Based on CLTC-P. Research on New Energy Technology and Energy Consumption Development DOI10.1051/e3sconf/202123501035 [4] Zarin Subah Shamma, Bridger Jones, Max Clark, Carter Bailey, Mario Harper, Electric vehicle range prediction estimator (EVPRE), doi.org/10.1016/j.simpa.2022.100369 [5] Da Li, Zhaosheng Zhang, Peng Liu, Zhenpo Wang and Lei Zhang, Battery Fault Diagnosis For Electric Vehicles Based on Voltage Abnormality by Combining the Long Short-term Memory Neural Network and the Equivalent Circuit Model, DOI 10.1109/TPEL.2020.3008194, IEEE Transactions on Power Electronics [6] Man-Fai Ng, Jin Zhao, Qingyu Yan, Gareth J. Conduit and Zhi Wei Seh,Predicting the state of charge and health of batteries using data-driven machine learning. Nature Ma chi Intelligence | VOL 2 | March 2020 | 161–170 [7] Süleyman Çeven, Ahmet Albayrak and Raif Bay?r, Real-time range estimation in electric vehicles using fuzzy logic classifier. Computers & Electrical Engineering. Volume 83, May2020, 106577 doi:10.1016/j.compeleceng.2020.106577. [8] Kristen A. Severson , Peter M. Attia, Norman Jin, Nicholas Perkins, Benben Jiang, Zi Yang, Michael H. Chen, Muratahan Aykol, Patrick K. Herring, Dimitrios Fraggedakis, Martin Z. Bazant, Stephen J. Harris, William C. Chueh and Richard D. Braatz, Data-driven prediction of battery cycle life before capacity degradation, Nature Energy | VOL 4 | MAY 2019 | 383– 391 [9] Quan Ouyang, Weiji Han, Changfu Zou, Guotuan Xu, and Zhisheng Wang, Cell Balancing Control for Lithium-Ion Battery Packs: A Hierarchical Optimal Approach, DOI 10.1109/TII.2019.2950818, IEEE Transactions on Industrial Informatics [10] Yi Xie, Wei Li, Xiaosong Hu, Changfu Zou, Fei Feng and Xiaolin Tang, Novel Mesoscale Electro thermal Modeling for Lithium-ion Batteries, DOI 10.1109/TPEL.2019.2927014, IEEE Transactions on Power Electronics [11] Chaoqiang Jiang, K. T. Chau, Chunhua Liu, Christopher H. T. Lee, Wei Han and Wei Liu,Move-and-Charge System for Automatic Guided Vehicles, IEEE TRANSACTIONS ON MAGNETICS [12] D. N. T. How, M A Hannan, M. S. Hossain Lipu, K. S. M. Sahari, P. J. Ker, and K. M. Muttaqi, State-of-Charge Estimation of Li-ion Battery in Electric Vehicles: A Deep Neural Network Approach, DOI 10.1109/TIA.2020.3004294, IEEE Transactions on Industry Applications. [13] Mauro Carignano, Vicente Roda, Ramon Costa-Castelló, Luis Valiño, Antonio Lozano, And Félix Barreras, Assessment of Energy Management in a Fuel Cell/Battery Hybrid Vehicle. DOI 10.1109/ACCESS.2018.2889738.IEEE Access. [14] Jianan Zhang, Lei Zhang, Fengchun Sun and Zhenpo Wang, An Overview on Thermal Safety Issues of Lithium-ion Batteries for Electric Vehicle Application, DOI 10.1109/ACCESS.2018.2824838, IEEE Access [15] Kaveh Sarrafan, Danny Sutanto, Kashem M. Muttaqi and Graham Town, Accurate range estimation for an electric vehicle including changing environmental conditions and traction system efficiency, Faculty Of Engineering And Information Sciences - Papers: Part B [16] Chaofeng Pan, Wei Dai, Liao Chen, Long Chen, and Limei Wang. Driving range estimation for electric vehicles based on driving condition identification and forecast. AIP Advances 7, 105206 (2017)DOI:10.1063/1.4993945 [17] Joonki Hong, Sangjun Park and Naehyuck Chang, Accurate remaining range estimation for Electric vehicles, DOI: 10.1109/ASPDAC.2016.7428106, IEEE Xplore: 10 March 2016 [18] Chuang Yu and K.T. Chau Thermoelectric automotive waste heat energy recovery using maximum power point tracking, Elsevier Science Ltd. Energy Conversion and Management 50 (2009) 1506–1512. [19] K.T. Chau, Y.S. Wong, Overview of power management in hybrid electric vehicles, Elsevier Science Ltd, Energy Conversion and Management 43 (2002) 1953–1968.
Copyright
Copyright © 2024 Dinesh Godara, Dr. M.K. Bhaskar, Manish Parihar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET58685
Publish Date : 2024-02-29
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online