

Ijraset Journal For Research in Applied Science and Engineering Technology
Assistive Orthosis for Paralysis People Using 3d Printing Model
Authors: S. Praveena, S. Jaisonprabu, M. Makilnath , P. Jothiprakash
DOI Link: https://doi.org/10.22214/ijraset.2024.61247
Certificate: View Certificate
Abstract
The Monoplegia is a one type of paralysis. The Monoplegia patients do not do the regular Elbow Extension and Flexion activities, because weakens muscle movements, mainly due to nerve damage. This orthosis is used to externally assist patients elbow extension and flexion movements. An elbow extension and flexion assist orthosis is automatic functioning system. When the patient is shaking the fingers, vibration sensor detects the vibration and the device is extending the hand by using Linear actuator and flexion is also done by a same procedure. The prototype is design in 3d printing model which was a make the design lightweight as much possible. Consider incorporating a user-friendly control interface that allows the patient to adjust the level of assistance or control the device based on their comfort and needs. Implement safety features to prevent sudden or unintended movements that could cause discomfort or injury .Design the orthosis to be easily adjustable to accommodate different arm sizes and shapes. Allow for customization based on the individual\'s specific range of motion and strength. efficient and lightweight power source, considering the need for mobility and comfort. Optimize the battery life to ensure the device can be used throughout the day without frequent recharging. Ensure that the materials used in the 3D printing model are durable, hypoallergenic, and lightweight .Pay attention to the ergonomic design to maximize comfort during prolonged use. Develop a comprehensive user training program to help patients become familiar with the device and optimize its use. Ensure that the design complies with relevant medical device regulations and standards to guarantee safety and efficacy. Collaborate with healthcare professionals, therapists, and end-users to gather feedback and make continuous improvements to the design. Thus the prototype will help to recover as soon as possible from the monoplegia condition.
Introduction
I. INTRODUCTION
Monoplegia and hemiplegia are common neurological symptoms in patients presenting to the emergency department as well as outpatient department. Monoplegia refers to weakness of one limb (either arm or leg) and hemiplegia refers to weakness of one arm and leg on the same side of body (either left or right side).There are a variety of underlying causes for monoplegia and hemiplegia. The causes differ in different age groups. The causes also differ depending on the onset, progression and duration of weakness. Therefore, one needs to adopt a systematic approach during history taking and examination in order to arrive at the correct diagnosis. Appropriate investigations after these would confirm the diagnosis.The aim of this chapter is to systematically look at the differential diagnosis of monoplegia and hemiplegia.
II. SOFTWARE COMPONENTS
A. Ultimaker Cura
Cura is an open source slicing application for 3D printers. It was created by David Braam who was later employed by Ultimaker, a 3D printer manufacturing company, to maintain the software
B. Software Requiremnets
Windows Operator :8/10/11
Bit Operator System: A 64-bit operating system updated to the latest version Graphics: An OpenGL 4.1 compatible graphics card for 3D layer view Display :A display resolution of 1920 x 1080
Processor: An Intel Core 2 or AMD Athlon 64 processor or higher Hard Disk:600 MB or More Ram :4GB or More
???????C. Technical Specifications
Ultimaker Cura works by slicing the user’s model file into layers and generating a printer- specific g-code.
Once finished, the g-code can be sent to the printer for the manufacture of the physical object. The open source software, compatible with most desktop 3D printers, can work with files in the most common 3D formats such as STL, OBJ, X3D, 3MF as well as image file formats such as BMP, GIF, JPG, and PNG.
???????D. Design Of Elbow Model
In K-means algorithm, it is recommender to pick the optimal K, according to the Elbow Method.
However all the tutorials explain the elbow method in these 4 steps:
a. Run K-means for a range of K's
b. Calculate the Sum of Squares of the distances from the cluster mean
c. Plot a curve of the SSD over K's
d. Visually pick the K at the elbow.
Elbow length in mm = Tan(Elbow Angle/2) X Elbow Radius in mm
For 90° Long Radius elbows, center to end dimension given in dimension tables of ASME B16.9 is same as radius of elbow. This is because Tan(90/2) i.e. Tan 45 is 1.Normally custom elbow angles from 45 degree to 90 are cut from 90 degree standard elbow. But for custom elbow angles smaller than 45 degree, elbow is normally cut from existing standard 45 degree elbow. Center to end dimension given in dimension tables for 45 degree elbow must be divided by Tan(22.5) to get elbow radius for standard 45 degree elbow. Then we can use above formula to get elbow angle for custom degrees
E. Aurdino IDE
The latest IDE for Windows is bundled with Java Virtual Machine 8u32. Java 8 runs on the following Windows versions:
- Windows 8 (Desktop)
- Windows 7
- Windows Vista SP2
- Windows Server 2012 (64-bit)
- Windows Server 2008 R2 SP1 (64-bit)
Java 8 requires a Pentium 2 266 MHz processor and 128 MB of RAM. Hard Disk: 600 Mb of free disk space .
III. HARDWARE COMPONENTS
A. ARDUINO UNO
Arduino UNO is a low-cost, flexible, and easy-to-use programmable open-source microcontroller board that can be integrated into a variety of electronic projects. This board can be interfaced with other Arduino boards, Arduino shields, Raspberry Pi boards and can control relays, LEDs, servos, and motors as an output.
???????B. Relay
- Flash Memory - 32 KB (of which 2KB used by bootloader)
- SRAM - 2 KB
- EEPROM - 1 KB
- Clock Speed - 16 MHz
Relays are electrically operated switches that open and close the circuits by receiving electrical signals from outside sources.
???????C. Linear Actuator
A linear actuator changes the rotational motion of a motor into a straight line. Conventional electric motors move in a circle, while linear actuators move forward and backward. The push and pull action allows the device to slide, tip, and lift items with the push of a button.
???????D. Vibration Sensor
Vibration sensors are used to measure the vibration or oscillatory motion of equipment or systems. They are useful in all industries wherever there is a possibility of vibration and need to monitor the same for improved asset performance.
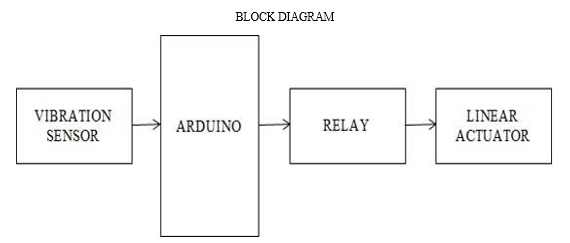
IV. EXPERIMENTAL SETUP AND PROCEDURE FOR PROPOSED SYSTEM a)EXPERIMENTAL SETUP AND PROCEDURE
Here we are using ARDUINO as the controller. So, the input and output units are interfaced
with the ARDUINO. The Vibration Sensor interfaced with Arduino. The Arduino is connected through the Relay.Power supply is interfaced with the Relay. Linear actuator also connected in the Relay. Linear actuator is the output of the system. An elbow extension and flexion assist orthosis is automatic functioning system. When the patient is shake the fingers, vibration sensor detect the vibration and the device is extend the hand by using Linear actuator and flexion is also done by same procedure. This orthosis will help to recover the patients and do regular activities as soon as possible.
V. RESULT
This orthosis is used for monoplegia patients. To support for the Monoplegia patients Elbow Extension and Flexion movements, To provide regular activities for patients, To help the patient in Rehabilitation and when the patients continuously use the orthosis, will recover from the disease as soon as possible.
Conclusion
Fifteen million individuals worldwide experience a paralysis each year with 50,000 of these cases occurring in Canada. Monoplegia is a type of paralysis, It patients does not do the regular Elbow Extension and Flexion activities, because weakens muscle movements, mainly due to nerve damage. This orthosis is used to externally assist patients elbow extension and flexion movements. An elbow extension and flexion assist orthosis is automatic functioning system. The prototype is a lightweight, this orthosis which can be made relatively easily and is potentially concealed under clothing.The device is placed on the elbow of the patient. When the patient shakes their fingers or palm, the vibration sensor is sense the vibration. This vibration is taken to input of the device. Then the input is send to arduino and control the electronic switches.It provides elbow extension and flexion for the Monoplegia patients and also act as physiotherapy equipment. When the patient continuously use this device can be provides regular activities and recovery as soon as possible. In future will developed AI based orthosis. It consists of EEG systems and EMG systems.
References
[1] Megalingam, R.K., Manoharan, S.K., Mohandas, S.M., Reddy, C.P.K., Vijay, E., Naveen, [2] P.N.V.K. and Chandrika, D., 2023. Wearable Hand Orthotic Device for Rehabilitation: Hand Therapy with Multi-Mode Control and Real-Time Feedback. Applied Sciences, 13(6), p.3976. [3] Chen, Z.H., Yang, Y.L., Lin, K.W., Sun, P.C. and Chen, C.S., 2022. Functional assessment of 3D-printed multifunction assistive hand device for chronic stroke patients. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 30, pp.1261-1266 [4] Degerli, Y.I., Dogu, F. and Oksuz, C., 2022. Manufacturing an assistive device with 3D printing technology–a case report. Assistive Technology, 34(1), pp.121-125. [5] Degerli, Y.I., Dogu, F. and Oksuz, C., 2022. Manufacturing an assistive device with 3D printing technology–a case report. Assistive Technology, 34(1), pp.121-125. [6] Thorsen, R., Bortot, F. and Caracciolo, A., 2021. From patient to maker-a case study of co- designing an assistive device using 3D printing. Assistive technology, 33(6), pp.306-312. [7] Schwartz, J.K., Fermin, A., Fine, K., Iglesias, N., Pivarnik, D., Struck, S., Varela, N. and Janes, W.E., 2020. Methodology and feasibility of a 3D printed assistive technology intervention. Disability and Rehabilitation: Assistive Technology, 15(2), pp.141-147. [8] Akinniyi, O.T., Ayodele, K.P., Komolafe, M.A., Olaogun, M.O., Owolabi, D.G., Fajimi, M.A., Macaulay, M. and Ogunba, K.S., 2022, April. A Low-Cost Orthosis Using a Compliant Spring Mechanism for Post-Stroke Hand Rehabilitation. In 2022 IEEE Nigeria 4th International Conference on Disruptive Technologies for Sustainable Development (NIGERCON) (pp. 1-4). IEEE. [9] Xu, J., Meeker, C., Chen, A., Winterbottom, L., Fraser, M., Park, S., Weber, L.M., Miya, M., Nilsen, D., Stein, J. and Ciocarlie, M., 2022, May. Adaptive Semi-Supervised Intent Inferral to Control a Powered Hand Orthosis for Stroke. In 2022 International Conference on Robotics and Automation (ICRA) (pp. 8097-8103). IEEE. [10] Oroya, J., Oroya, D. and Huamanchahua, D., 2021, December. Design a hand orthosis to aid post-stroke patients with hemiplegia. In 2021 IEEE 12th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON) (pp. 0752-0757). IEEE. [11] Tran, P., Jeong, S., Herrin, K.R. and Desai, J.P., 2021. Hand exoskeleton systems, clinical rehabilitation practices, and future prospects. IEEE Transactions on Medical Robotics and Bionics, 3(3), pp.606-622. [12] Oroya Barreto, J.A., Oroya Barreto, D.D. and Huamanchahua Canchanya, D.M., 2021. Design a hand orthosis to aid post-stroke patients with hemiplegia. [13] Wee, J., Shank, T.M., Castro, M.N., Ryan, L.E., Costa, J. and Rahman, T., 2019, June. Elbow flexion assist orthosis for arthrogryposis. In 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR) (pp. 494-498). IEEE. [14] Yurkewich, A., Hebert, D., Wang, R.H. and Mihailidis, A., 2019. Hand extension robot orthosis (HERO) glove: development and testing with stroke survivors with severe hand impairment. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 27(5), pp.916-926. [15] Shimizu, Y., Kadone, H., Kubota, S., Ueno, T., Sankai, Y., Hada, Y. and Yamazaki, M., 2019. Voluntary elbow extension-flexion using single joint hybrid assistive limb (HAL) for patients of spastic cerebral palsy: two cases report. Frontiers in neurology, 10, p.2. [16] Megalingam, R.K., Vijay, E., Naveen, P.N.V.K., Reddy, C.P.K. and Chandrika, D., 2019, April. Voice-based hand orthotic device. In 2019 International Conference on Communication and Signal Processing (ICCSP) (pp. 0496-0500). IEEE. [17] Murugesan, D., Sivadas, K., Keerthana, M., Shalini, S. and Vijayan, S., Hemogluco Analyser for Clinical and Diagnostic Purposes in Diabetic Patients. [18] Mudhivarthi, B.R., Shah, P., Sekhar, R., Murugesan, D. and Bhole, K., 2023, July. Cybernetic Technologies in Industry 4.0. In 2023 14th International Conference on Computing Communication and Networking Technologies (ICCCNT) (pp. 1-6). IEEE. [19] Shylla, D., Shah, P., Sekhar, R. and Murugesan, D., 2023, July. Embedded Systems in Industrial Automation 4.0. In 2023 14th International Conference on Computing Communication and Networking Technologies (ICCCNT) (pp. 1-6). IEEE. [20] Dodia, A., Shah, P., Sekhar, R. and Murugesan, D., 2023, May. Smart sensors in industry 4.0. In 2023 4th International Conference for Emerging Technology (INCET) (pp. 1-6). IEEE. [21] Murugesan, D., Jagatheesan, K., Shah, P. and Sekhar, R., 2023. Fractional order PI?D? controller for microgrid power system using cohort intelligence optimization. Results in Control and Optimization, 11, p.100218.
Copyright
Copyright © 2024 S. Praveena, S. Jaisonprabu, M. Makilnath , P. Jothiprakash. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61247
Publish Date : 2024-04-29
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online