

Ijraset Journal For Research in Applied Science and Engineering Technology
Automated Car: Intelligent Maneuver
Authors: Dr. T. Kameswara Rao, Eswar Venkata Durga Rao Challa, Venkata Naidu Donapati, Sri Gayathri Pragna Gudipudi, Madhu Babu Chilaka, Sri Ram Chandra Rao Dhavaleswarapu
DOI Link: https://doi.org/10.22214/ijraset.2024.59226
Certificate: View Certificate
Abstract
Automated vehicles are rapidly evolving to meet the demands of modern transportation systems, aiming for enhanced safety, efficiency, and user experience. Autonomous vehicles are also a big part of these technologies. The most important action of a driver has to do is to follow the lanes on the way to the destination. This research presents Intelligent Maneuver, a sophisticated framework integrating four key functionalities crucial for automated car navigation: object avoidance, traffic light detection, self-parking, and lane detection. Leveraging advanced computer vision techniques and sensors fusion our framework enables vehicles to navigate complex urban environments autonomously.
Introduction
I. INTRODUCTION
The project, aptly named "Intelligent Maneuver," represents a significant stride in this direction, integrating cutting-edge technologies to create a car with autonomous capabilities. The key Functionalities that focus of the proposed work is on four pivotal functionalities are: A. Object Avoidance [6],[8] with sensors, allows it to detect and respond to obstacles in real-time. Whether it's a pedestrian crossing the road or an unexpected roadblock. B. Self-Parking System [4] can identify available parking spaces, and seamlessly parks itself. C. Lane Detection [2], [7] with the help of advanced line detection algorithms are employed to identify the lanes precisely. D. Traffic light detection identify signals and then suitable actions are performed briskly.
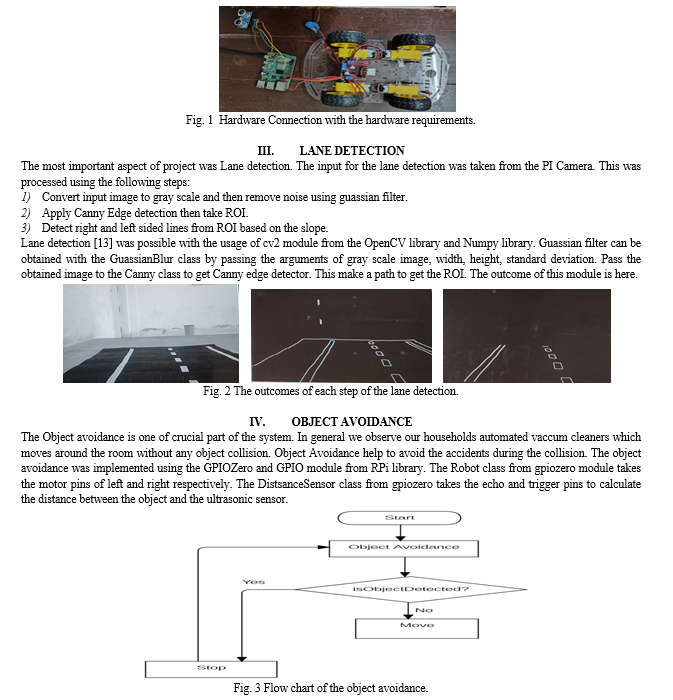
II. HARDWARE DESIGN
A. Hardware Modules
- Raspberry PI (4B Model)
- Ultrasonic Sensors
- Jumper Cables (all types)
- Car Chassis
- 4 wheels with Motors connected
- Motor Driver (L293N)
- Power Bank, LEDs
- PI Camera module
B. Hardware & Software Description:
- Raspberry PI (4B Model): It acts as a computer which is debit card sized. It has a quad core processor of 64 bit. It has inbuilt camera module. It has in built Bluetooth facility for connection of remote device. It consists 8GB of LPDDR4 RAM along with Gigabit Ethernet and USB.
- Ultrasonic Sensors: It is also called as a Distance Sensors. It is used to find distance between vehicle and an object in front of it. The Ultrasonic Sensor passes echo signal and receive trigger after the object was found. Using this signals the Ultrasonic sensors find the distance.
- PI Camera module: It is camera that used to take high defined photographs as well as Videos. It is used to detect the traffic light and the Lane Detection.
- Debian Buster OS: It is a new version of the Raspbian. This makes a way for less security breach. It allows the user to comfortable in security.
- Python: It is a strong programming language i.e., Object Oriented Programming Language. It consists vast number of libraries which provide wide opportunities to build the models. These built-in modules make a way for shorten the implementation for the programmer.
- GPIO Library (RPi.GPIO): It is used to collect the input from the connected devices and process it then to perform the certain actions based on the process.
- OpenCV: It is an openly available resource to process on the video stream and photographs. It is majorly used in vast sectors for classifying the images in to different formats. The OpenCV has large number of built-in functionalities to process quickly with minimum number of statements.

VII. ACKNOWLEDGMENT
It is impossible for developing without these great inventions of raspberry PI, Ultrasonic Sensors and other components. All the resources played a crucial role in making a successful prototype. Python had an outstanding open-source libraries which led to make on more computations and processing with it for future safety. I would like to thank all other people who show cased all their willingness and alertness in designing and processing of this system successfully.
Conclusion
In this project paper, we worked on the prototype model which focuses on the Object Avoidance, Traffic Light detection, Lane Detection, Self-Parking system. This complete prototype helpful to process all the pivotal functionalities in to the car. This system showed that it requires less energy usage and more time saver. It provides wide safer journey to all the users. System helps in increasing the mobility for the elderly and disabled people. Project provides safe transportation and helps in reducing the road accidents.
References
[1] Gurjashan Singh Pannu, Mohammad Dawud Ansari, Pritha Gupta, Design and Implementation of Autonomous Car using Raspberry Pi, International Journal of Computer Application, 9 March 2015. [2] A.A.M. Assidiq, Othman O. Khalifa, Md. Rafiqul Islam, Sheroz Khan, Real time lane detection for autonomous vehicles, IEEE Xplore, 2008 [3] Broughton School of Motoring, Parallel Parking [4] Abhirup Khanna, R. A. (2016). IoT based Smart Parking System, International Conference on Internet of Things and Applications (IOTA) (p. 5). Pune: IEEE. [5] Avgan, U Balkan, Tuna Unlusoy, Y. Samim. (2004). Design and Control of a Self Parking Model Car [6] Lohit Ujjainiya and M. Kalyan Chakravarthi, Raspberry – pi based cost effective vehicle collision avoidance system using image processing, ISSN 1819-6608 ARPN Journal of Engineering and Applied Sciences Vol.10, No.7, April 2015. [7] Joel C. McCall &Mohan M. Trivedi, Video-Based Lane Estimation and Tracking for Driver Assistance: Survey, System, and Evaluation, IEEE Transactions on Intelligent Transportation Systems, vol. 7, no. 1, March,2006, pp. 20-37. [8] Fayaz Shahdib ,Md. Wali Ullah Bhuiyan, Md. Kamrul Hasan, Hasan Mahmud, (2013), Obstacle Detection and Object Size Measurement for Autonomous Mobile Robot using Sensor, International Journal of Computer Applications(0975–8887) Volume66–No.9,March2013. [9] Milton Hooper, Driving 101: Parking [10] S. Mafrica, A. Servel, and F. Ruffier, Towards an automatic parking system using bio-inspired 1-D optical flow sensors, 2015 IEEE Int. Conf. Veh. Electron. Safety, ICVES 2015, no. November, pp. 96–103, 2016. [11] Mohit Patil, R. S. (2014). Smart Parking System Based On Reservation . International Journal of Scientific Engineering and Research (IJSER) , 6. [12] Raivo Sell, Anton Rassolkin, Mairo Leier, Juhan-Peep Ernits, Self-driving car ISEAUTO for research and education, 2018 19th International Conference on Research and Education in Mechatronics (REM) June 7-8, 2018, Delft, The Netherlands. 978-1-5386-5413-2/18/$31.00 ©2018 IEEE. [13] Ziqiang Sun, Vision Based Lane Detection for Self-Driving Car, 2020 IEEE International Conference on Advances in Electrical Engineering and Computer Applications (AEECA)
Copyright
Copyright © 2024 Dr. T. Kameswara Rao, Eswar Venkata Durga Rao Challa, Venkata Naidu Donapati, Sri Gayathri Pragna Gudipudi, Madhu Babu Chilaka, Sri Ram Chandra Rao Dhavaleswarapu. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET59226
Publish Date : 2024-03-20
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online