

Ijraset Journal For Research in Applied Science and Engineering Technology
Automated Multi-Purpose Agriculture Robot
Authors: Vikas J. Nandeshwar, Prerna Chawla, Soham Chavan, Vedant Chavan, Sayali Chavare, Vaibhavi Chavan
DOI Link: https://doi.org/10.22214/ijraset.2023.55865
Certificate: View Certificate
Abstract
Agriculture is very important occupation of our country. Almost, all the occupations directly or indirectly are related to Agriculture. However, issues concerning agriculture have always been hindering the development of country. The only solution to this is smart agriculture by adapting to various modernizing methods of agriculture. Now, our paper discusses about the applications of Robotics in agriculture. Hence, this robot can carry out multiple tasks simultaneously such as irrigation, ploughing, spraying fertilizers, etc. And saves a lot of money for farmer also, the yields gained will be profitable. Overall, the project will definitely benefit to the farmers. The whole agricultural system works with battery and is controlled via Bluetooth technology by Bluetooth Car app. Robot can cover a large area
Introduction
I. INTRODUCTION
More than 75% of India’s population is dependent on Agriculture. Hence, it is very important field in our country. But, there is requirement of a lot of manual labour for this purpose. Also the cost of manual labor is very high and still there is a chance of human error. Hence, in order to avoid the chance of human errors and save manual labor we have developed Agriculture Robot which can accomplish almost all the tasks which a farmer can do but with a lot more efficiency and precision. The main aim of agricultural robot is applying robotic technology in agricultural field.
This robot is a device designed to take care of plants by providing them with the necessary water and nutrients they need to grow. This device is programmed to water plants automatically based on their specific needs, and it can be controlled remotely via a smartphone app or a computer.
This technology helps to save the water as it ensures that plants receives consistent and appropriate amounts of water, which can improve their overall health and growth. By reducing the need for manual labor, farmers can save money on labor costs.
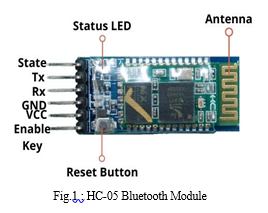
A. Bluetooth Module
HC-05 Bluetooth is a serial port convention module.HC-05 Bluetooth module was associated with the same microcontroller to set up a duplex correspondence channel amongst itself and the android advanced Mobile Phones. Normal Bluetooth works for range up to 100 m. Bluetooth 5.0 ranges up to 400 m.

II. LITERATURE REVIEW
- Rajkumar. G, A. Bagubali, “Smart Watering of Plants”: System of smart watering of plants is created for lessening manual work. By putting this system in your field or farm you not only save water but make your plants be the most effective they could be
- Niam Tamami, Ali Husein Alisary, “Design of Automatic Watering System Based on Arduino”: This paper presents a novel method for making automatic sprinklers precision with predetermined locations, designing automatically device to monitoring humidity by the soil and making a watering machine that can 2 axis watering.
- S. Madiwalar, Sujata Patil, Kaveri Ugare, “Solar Powered Autonomous Multipurpose Agriculture Robot”: The designed Robotics techniques are efficient for achieving the tasks such as automatic cultivating, seed providing, water sprinkling, insecticide spraying and Grassland wounding with the help of solar energy.
- K Srikanth, R Sindhu, M Praijatham, “ Multipurpose Autonomous Agricultural Robot ” : The Proposed system aims at designing multipurpose autonomous agricultural robotic vehicle which can be controlled through Bluetooth for ploughing, seeding and irrigation systems
A. Synthesis/Algorithm/Design/Method
- Design Of a Robot
a. Firstly, here we have to choose the plyboard of size 20*25 and connect the 4 BO (Battery Operated) motors to it with the help of glue-gun.
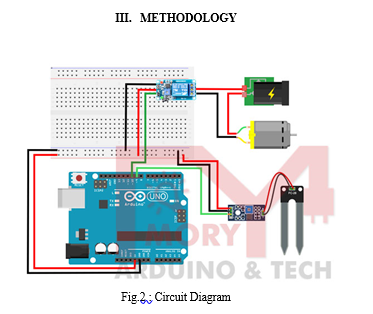
b. We also made use of Wheels, Arduino, Water Pump, HC-05 Bluetooth Module, L298N Motor Driver, Batteries, etc.
2. Assembling the Robot
a. Here, we designed the basic chassis of robot by assembling all the components.
b. We interconnected the BO Motors in pair. Input pins of 1st pair are connected to Output-1 and Output-2 of Motor Driver.
c. Likewise, another input pins of 2nd pair are connected to Output-3 and Output-4 of motor driver. Further we placed the Arduino UNO R3 board on plyboard, then 4 input pins from motor driver which are IN1,IN2,IN3,IN4 are connected to 4 Digital pins of Arduino Uno R3 which are 2,3,4,5.
3. Installation of Wireless Communication Module
a. Here, we connected HC-05 Bluetooth Module with Arduino Uno R3 to get wireless data.
b. Application which we used to control the Robot is Arduino Car.
4. Installation of Water Pump and Water Container
a. Here, Water Pump is connected to the system and water container is placed accordingly.
b. Further we attach pipes to Water Pump in order that water will flow with full force.
c. Further we attached nozzle to water pipes in order to get sprinkling of water. We connected LED and switch to the ply board.
d. At last we gave common power supply to Arduino, Motor Driver and other components.


V. Advantages
- Water Conservation: Sprinkler agriculture robots can be programmed to water crops precisely, delivering the right amount of water to each plant. This helps conserve water resources and reduces water waste, which is especially important in areas with water scarcity.
- Increased Crop Yield: Sprinkler agriculture robots can water and fertilize crops at the optimal time, which can improve crop growth and increase yield. By providing the right amount of water, crops can grow healthier and produce a higher yield.
- Labor Savings: Using sprinkler agriculture robots can significantly reduce the need for manual labor in agriculture. Instead of manual labor, the robot can do the job more efficiently, freeing up time for farmers to focus on other tasks.
- Cost Savings: Using sprinkler agriculture robots can also lead to significant cost savings over time. Farmers can save money on labor costs. Additionally, using water more efficiently can reduce water bills and save energy costs.
- Improved Safety: Remote-controlled sprinkler agriculture robots can be operated from a safe distance, reducing the risk of accidents or injuries associated with manual labor. This can be particularly important in challenging terrain or harsh weather conditions.
- Layman Handling: The mode of operation of this machine is very simple and is easy to handle.

VII. ACKNOWLEDGMENT
For this project we would like to Acknowledge our HOD Prof. Chandrashekhar M. Mahajan Sir,also our EDAI Project Guide Prof. Vikas J. Nandeshwar guided us every now & then in order to execute our project successfully.
Conclusion
The Paper aims on the design & development of the agricultural system which can plough the land, sow the seeds, water spray, pesticides spray, etc. The entire agricultural system requires only battery and controlled through Bluetooth technology. The system reduces the manual labor, helps in time management, increase the yield of crops, profit and, thus, it is really cost-efficient. Also, the yields of the crop are high and farmer can be very profitable from his business.
References
[1] Raj Kumar.G, A.Bagubali, “Smart Watering of Plants” in VitECoN,2019 [2] Niam Tamami, Ali Husein Alasiry, “Design and Development of Automatic Plant Robots with Scheduling System” at IES ,2020 [3] Sujata Patil, Shweta Madiwalar, “Solar Powered Autonomous Multipurpose Agricultural Robot”, ICIMIA, 2020 [4] K Srikanth, R Sindhu, M Praijatham, “Multipurpose Autonomous Agricultural Robot” ICECA,2017 [5] Swati D. Sambare, Belsare S.S, “Seed Sowing Using Robotics Technology,” International Journal of scientific research and management (IJSRM), 2015, Volume3, Issue5, Pages 2889- 2892, ISSN: 2321-3418. [6] Palmer Dean, “Warehouse management: Integrating the missing link”, Manufacturing Computer Solutions, vol. 8, no. 1, pp.14-16, January 2002, ISSN 1358-1066. [7] Vijay P, Rakesh K.V.N, B. Varun.” Design of A MultiPurpose Seed Sower Cum Plougher.” International Journal Of Emerging Technology and Advanced Engineering,(ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 4, April 2013). [8] Deekshitha K P, Prasanna P. “Automated Agribusiness Furrowing Seeding and Grass Cutting Utilizing Android Smartphone.” International Journal And Innovative Research in Computer and Communication Engineering, 2017, Volume. 5, Issue 4, Pages 8658-8662. [9] Avital Bechar, Clement Vigneault “Agricultural robots for field operations: Concepts and Components” BiosystemsEngineering, Volume 149, 2016, pp.94-111. [10] Belforte G, Deboli R, Gay P, RicaudaAimonino D, \"Robot Design and Testing for Greenhouse Applications\", Biosystems engineering, vol. 95, no. 3, pp. 309-321, 2006
Copyright
Copyright © 2023 Vikas J. Nandeshwar, Prerna Chawla, Soham Chavan, Vedant Chavan, Sayali Chavare, Vaibhavi Chavan. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET55865
Publish Date : 2023-09-25
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online