

Ijraset Journal For Research in Applied Science and Engineering Technology
Automatic Accident Avoidance System
Authors: Manas Srivastava , Dr. Yogesh Kumar , Dr. Rashid Ansari
DOI Link: https://doi.org/10.22214/ijraset.2024.61740
Certificate: View Certificate
Abstract
As much as road travel has improved lives for the better part it also has proposed many challenges. Along with taking lives of those if countless people it also has been an economic burden on the country, in India the cost of road travel accidents in 2019 was estimated to be 12 billion USD. Along with loss of lives, serious injuries, damage to public infrastructure and with huge financial burden on the tax payers it becomes a major in road block in the urbanization of developing countries, a lot of the steps have been taken by the government regarding this issue including awareness among the general public about using the safety features present in their respective automobile, avoiding driving under the influence of substances, regulating the manufacturing standards of automobiles so they can withstand the damage and keep the passengers safe. But these steps are primary based on the presumption on the reliable decision making of the human driver. A lot more could be achieved by devising methods for accident prevention that don’t rely on human intervention. In this project we have devised a system that works automatically using an ATmega328mp microcontroller paired with an ultrasonic distance sensor that can detect the obstacles facing the automobile and can make a decision to warn the driver and if ignored can override the control of the human driver.
Introduction
I. INTRODUCTION
As India progresses towards rapid urbanization and economic development it begins to see a surge in private vehicle ownership and road travel. However, this has left behind the pace of infrastructure development in India which still needs work from ground up. This has led to an increase in the road travel accidents across the country, many taking up lives and leaving people permanently injured. Despite the government intervention, it has been one of the leading causes of death among Indians. A much needed effort was required from the side of technologists that can apply the concepts from academic research and devise systems that prevent such accidents. This report explores the use of ATmega328p single chip based microcontroller named Arduino Uno to program and make use of its functionality of its platform and use ultrasound sensor. This project would be proof of concept for a system that is much cheaper than other industry alternatives. Due to its design this system is supposed an automated system that would remove the need for human intervention which obviously has a slower response time as compared a electronics device. As this project would be very low cost and a scaled down version it could easily be replicated and tested on a variety of different automobiles.
II. LITERATURE REVIEW
[1] Varma, A., Ashwath, A., Verma, A., Bagubali, A. and Krishnan, K.V proposed a robot capable of avoiding obstacles using Arduino UNO and Ultrasonic sensors, they’ve shown in their research using L298D motor drive IC that their robot is capable of using the concept of sonar is able to change the direction by redirecting power to their different motors of their axles. Their robot also took influences from multidirectional sensors that allowed it avoid obstacles in all directions.
[2] Madhu, Dr. Karthik Koti and K Surabhi propose a new system in which the user driving the vehicle will be registered to an android application running on a smartphone. That application will be connected to microcontroller through Bluetooth module which when the user has turned on that application will continuously monitor the system. Thus, this new system is designed to solve the problem where drivers may not be able to brake manually exactly at the required time.
III. COMPONENTS
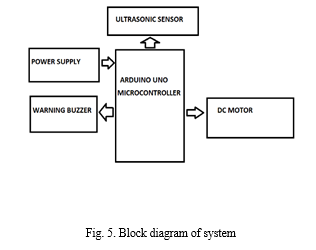
To solve the problem of accident avoidance we needed a sensor, particularly a HC-SR04 sensor which is used as an ultrasonic sensor that could actually perceive the threat in front of the automobile, which it would then transmit to the Arduino microcontroller which used the instructions written in a modified C++ and based on the case of the scenario it would raise alerts to the driver if ignored it would eventually take over the control and avoid the collision with another automobile.
HCSR04 Module-This is a C++ library used by the Arduino microcontroller to connect and operate the HCSR04 ultrasonic sensor.
Arduino IDE-The project use Arduino IDE to program the microcontroller, it offers a vast array of libraries coded in a modified version of C++.
Piezoelectric Buzzer- This buzzer is used to give indication to the user about upcoming obstacles and switching of the different stages of the system.
LED-Light Emitting Diodes are being used to give visual indication to the user about the different stages and keep them aware.
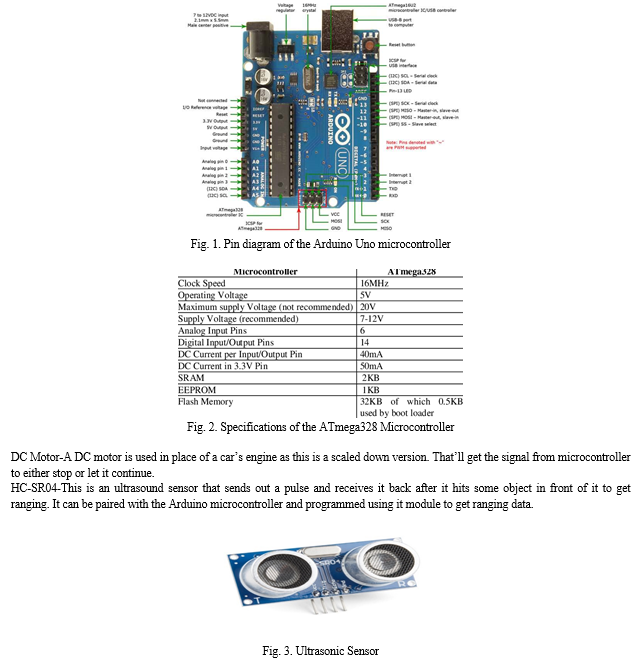
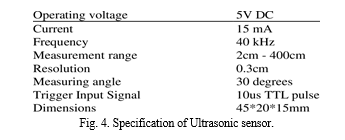
Arduino Uno Microcontroller-Arduino Uno was chosen to control the systems functions because of its flexible, low cost and low power consumption design. It is based on an ATmega328p single chip microcontroller.
IV. CONSTRUCTION
Here the ultrasonic sensor used has four pins VCC, GND, TRIG AND ECHO. The VCC pin is used to power the sensor, usually with +5V supply so it’ll be connected to the 5V pin of the Arduino Uno board. GND pin is used for grounding of the sensor so that will be connected to GND pin present in the Arduino. TRIG short for trigger is a pin used for input to start measurement by transmitting burst eight ultrasonic pulses at 40kHz by keeping this pin in HIGH state for 10us, these eight pulses help receiver in distinguishing the signal from the noise of surrounding, so this pin is connected to one of the I/O pins of Arduino for our project we’ll use 8th pin. ECHO pin is an output pin, it goes HIGH state for a particular time period which is equivalent to the duration of time the wave to returns back to the sensor and it’ll be connected to another I/O pin of Arduino we’ll use 9th pin. LEDs have two pins a longer Anode and the Shorter Cathode. Green LEDs anode will be connected to the 10th pin of Arduino and the cathode will be connected to the GND pin of the Arduino. Similarly Yellow LEDs cathode to the 11th pin and the cathode to the GND pin of Arduino. And finally Red LEDs anode to the 12th pin and cathode to the GND pin of Arduino as well. Piezo buzzers positive terminal will be connected to the 13th I/O pin of the Arduino and the negative terminal to the GND pin of Arduino. DC motor having two terminals, one of them will be connected to 1st I/O pin of Arduino and the other to GND pin of Arduino.
V. METHADOLOGY
This system is designed to make notice of objects right in front of the body of the vehicle through its sensors. The HC-SR04 ultrasonic sensor sends out a burst of 8 pulses of 40 kHz each that propagates further until it hits an object or else it comes back. When the said wave comes back without a delay it doesn’t send out a signal to the microcontroller but if the opposite happens then the controller gets the signal and then it processes it according to its programmed instructions to make the decision.
When the vehicle moves it checks it’s vicinity for obstacle, if distance between the Ultrasonic sensor and the obstacle at the front of vehicle is greater than 100cm then there will be no warning. Green color LED will glow and motor will run, indicating that obstacle is at a safe distance from the vehicle.
If the distance between the obstacle in front of the ultrasonic sensor is between 100-50cm, then yellow color LED will start blinking. This indicates the user that Obstacle is approaching. Motor will continue to run.
If the distance between obstacle and the sensor gets in between 50-20cm, then red color LED will start blinking. In addition to that a beeping sound is also be heard from the buzzer. Driver would need to respond in this situation. In spite of the warning, the motor will continue to run.
In the last stage. If the distance between the object gets to less than 20cm, the system will take control over the vehicle from the human driver and then the motor will automatically stop working, thus preventing an accident with the obstacle.
VI. APPLICATIONS
- This system can be used to scale up as a low cost model for accident avoidance systems as it uses an open source microcontroller which increases it’s functionality and cost effectiveness.
- It doesn’t use human intervention to function and that makes it a more reliable on top of an already present human driver.
- It can be scaled with other technologies to make it even more functional and featured
- The proof of concept of this experiment can be replicated easily and can be tested over and over in different conditions.
- This concept can be used in both autonomous systems and also in manned systems as these concepts are very flexible to be able to applied on variety of applications
Conclusion
The proposed system allows an automobile to make use of the sensor and allows the data collected to be processed by a single board microcontroller which can process that data according to the programmed code and be an aid to a human driver. The suggested system can be implemented at a low cost. The avoidance system also plays a key role in working without human intervention which can be an advantage in certain situations and can be a failsafe if in case a timely response isn’t able to come from the human driver, it can place itself in between the automobile. As this is a low cost proof of concept for the following technology it is crucial to remember this experiment was conducted by low cost sensors and with equipment of fairly decent margin of error. The following system can be conjoined with other systems to make a robust and fail safe system with added functionality that was otherwise not present. Especially AI, a camera connected to a single board computer having the software infrastructure to classify different images of objects can vastly increase it’s use cases. This system can also be implemented on suburban rail systems that run through high density areas where the chances of collision with a hard target or in some cases a living soft target are quite high. Accident avoidance systems are still being researched and a lot of them are in their primitive stages. A lot of research still needs to be done and for the same. Multiple approaches can also be applied to solve this problem, including the electronic avoidance systems like radars. But among all artificial intelligence has shown promise Cars are being developed with machine learning algorithms that are trained with large datasets to train the neural networks in order to fine tune the decision making of the car’s computer. These systems can be run parallel to the human driver as a convenient aid. Whereas work on the polar opposite approach has been taking place with developing systems that completely remove the need for human drivers as they are more prone in making mistakes. Work on self driving cars has been promising, as these systems are putting forward the argument on letting the computer take over the controls and let it do the decision making regarding the cars controls.
References
[1] Varma, A., Ashwath, A., Verma, A., Bagubali, A. and Krishnan, K.V., Implementation of Obstruction Avoiding Robot using Ultrasonic Sensor and Arduino UNO. [2] Madhu, Dr., Karthik Koti and K Surabhi. “VEHICLE COLLISION AVOIDANCE SYSTEM.” (2020). [3] Gururaj, Gopalkrishna. “Road traffic deaths, injuries and disabilities in India: current scenario.” The National medical journal of India 21 1 (2008): 14-20. [4] Mukhtar, A., Xia, L. and Tang, T.B., 2015. Vehicle detection techniques for collision avoidance systems: A review. IEEE transactions on intelligent transportation systems, 16(5), pp.2318-2338. [5] Seiler, Peter, Bongsob Song, and J. Karl Hedrick. “Development of a Collision Avoidance System.” SAE Transactions 107 (1998): 1334–40. http://www.jstor.org/stable/44741070 [6] Vairavan, R., Kumar, S.A., Ashiff, L.S. and Jose, C.G., 2018. Obstacle avoidance robotic vehicle using ultrasonic sensor, Arduino controller. International Research Journal of Engineering and Technology (IRJET), 5(02). [7] Chinmayi, R., Jayam, Y.K., Tunuguntla, V., Dammuru, J.V., Nadella, H., Dulla, S.S.K.A., Raja, L.S.K. and Nair, J.G., 2018, December. Obstacle detection and avoidance robot. In 2018 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC) (pp. 1-6). IEEE. [8] Ruikar, M., 2013. National statistics of road traffic accidents in India. Journal of Orthopaedics, Traumatology and Rehabilitation, 6(1), pp.1-6
Copyright
Copyright © 2024 Manas Srivastava , Dr. Yogesh Kumar , Dr. Rashid Ansari. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61740
Publish Date : 2024-05-07
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online