

Ijraset Journal For Research in Applied Science and Engineering Technology
Automatic Detection of Pedestrian Crossing Platform using Congestion Monitoring
Authors: Mahalakshmi V, Dr. Manjunath S
DOI Link: https://doi.org/10.22214/ijraset.2023.55178
Certificate: View Certificate
Abstract
One of the primary problems faced globally is the amount of traffic on the roads and the number of pedestrian accidents. The risk when crossing or walking on roads in urban and rural regions with significant traffic is a major factor in these incidents. A novel idea is put forth to avert such situations. Using congestion monitoring, automatic detection of pedestrian crossing platforms. An IR (Infrared) sensor module is used to continuously monitor pedestrian and traffic congestion. When there are more pedestrians on the road, the traffic light for automobiles turns red, allowing pedestrians to cross at the zebra crossing. In the proposed system, we are counting the packed pedestrians at the signal point and performing congestion monitoring of the pedestrian and vehicle count, which will be sensed by IR Infrared Sensors. This technique guarantees pedestrian crossing safety and prevents drivers from flouting the law, which could cause accidents.
Introduction
I. INTRODUCTION
Urban infrastructure that is intended to guarantee the safe and effective flow of pedestrians across roadways must include pedestrian crossings. Pedestrian crossings, also known as crosswalks, offer defined locations where people on foot can cross streets and roads, placing a priority on their safety and convenience.
By minimizing conflicts between people and motor vehicles, pedestrian crossings improve pedestrian safety. They are essential to fostering walkability, promoting active transportation, and guaranteeing equal access for pedestrians of all ages and abilities. Near facilities with a lot of foot activity, like schools, parks, shopping malls, and public transportation hubs, pedestrian crossings are especially important.
Around 12 percent of all accidents include pedestrians each year, resulting in 59,000 injuries and 4,000 fatalities. Due to a rise in pedestrian traffic, metropolitan regions are seeing more accidents than rural ones. Transportation planning necessitates the use of bike lanes and walkways for the safety of both pedestrians and vehicles. A labor-intensive and inefficient option would be to hire people to count pedestrians at different times and locations throughout the day, which is virtually impossible. We must investigate automated methods that allow us to count the number of vehicles and detect pedestrians
- Collection of data on bicycle and pedestrian traffic that is affordable and necessary for transportation planning.
- Letting cars know when there are pedestrians around to prevent accidents
A technique that works well for alerting systems might not be appropriate for calculating the volume of pedestrian traffic. The goal of this thesis is to offer a practical, affordable method of counting pedestrians to help with transportation planning. The term "pedestrian" refers to all standing, wheelchair-bound, and skateboard users. The thesis sought to build an automated system for the accurate, efficient, and cost-effective collecting of data on pedestrian and bicycle traffic. Only if an automated counting system gives a pedestrian count with at least 85% accuracy may it be used on a large scale. Among the widely used methods, computer vision-based algorithms can count objects with an accuracy of 85%. A zone-based solution employing an Auto scope camera and a vision-based form detection approach using a low-cost camera are both being examined for the task of detecting and counting pedestrians. Using a traffic camera, which is commonly used for vehicle surveillance, is the first method. The internal software's setup is changed to meet the needs for pedestrian counts. The vision-based approach to shape detection looks for pedestrian shapes in images and makes judgments using cutting-edge machine learning algorithms. The thesis's perspective includes a comparison of the two methods for counting pedestrians in terms of precision, expense, and deployment simplicity. Obstacles to detecting pedestrians include human articulations, as well as weather, lighting, and other external ambient factors. Finding pedestrians in a variety of positions, viewpoints, and attire is really challenging. With movements in arbitrary directions and many entry and exit points within a frame, pedestrian traffic is very erratic.
A significant difficulty is presented by occlusion, which is defined as concealment from view. To get clear pictures of pedestrians, the camera used to provide the detection algorithm input needs to be mounted at the right height and angle. When designing a detection algorithm, it is important to take into account the camera position, shadows, and changing lighting conditions.
II. LITERATURE SURVEY
- N. Diazet al. (2018), developed an autonomous traffic light system using PIR sensor and Raspberry Pi, based on the PIR sensor (passive infrared sensor) the microcontroller control lighting of the traffic intersection based on the times that programmed with Python code which sends a signal to the microcontroller when in the traffic light the PIR sensors detect IR radiation. The Raspberry pi was programmed using the Python, the structure built with several parts: Python Code, Circuit Schematic, simple design of the traffic light, and printed circuit board [1].
- A. H. Akoum (2017), designed a system in which flter method was used, this method flter the image only show the vehicles and separate all waste, after that display the number of cars in the image. According to the number of boxes that detected around the vehicles it gives the number of vehicles, the web browser used as a graphical user interface, many future improvements can be used to the counting vehicles, tracking and detection system can be expanded to real-time live video [3].
- M. M. Elkhatib and A. S. Alsamna (2019), designed a system consists of two part of implementation; frst, to control traffic light more effective using embedded system and image processing and second used wireless and Bluetooth connection from android application to control traffc light signals, using image processing and embedded system, the system capable to detect the number of vehicles simultaneously in each lane, the green light will be longer where there are more cars in one lane than the other, in this method as a system controller, they used Arduino and for detection and counting cars used C++ environment and OpenCV library [6].
III. EXISTING SYSTEM
Based on Candidate generation, the first step in pedestrian detection, involves the identification of potential pedestrians and the generation of candidates in the form of images. The earliest pedestrian identification techniques were Doppler Effect-based techniques, which involved signal wave transmission. Presently, most candidate generation techniques are based on computer vision and require the processing of pixelated images. Vision-based methods are appropriate for counting purposes since they address some of the disadvantages of Doppler Effect based techniques. The following sections outline the principles behind some candidate generation methods.
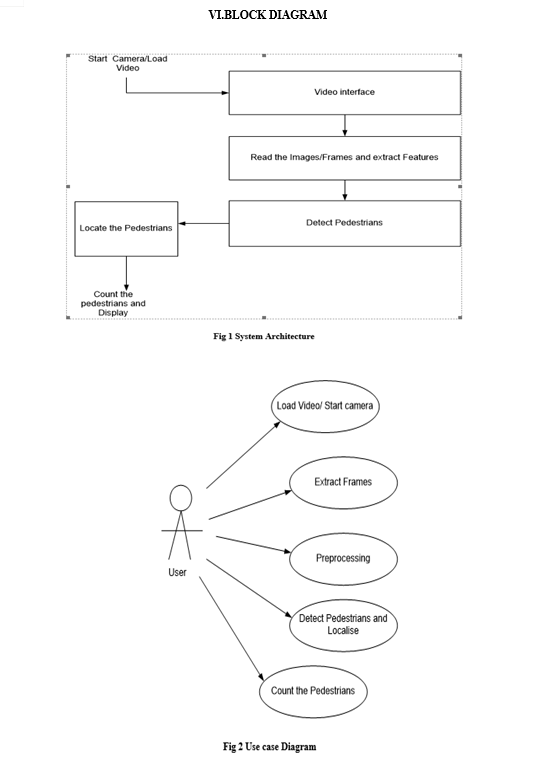
IV. PROPOSED SYSTEM
Proposed Work is to build a Pedestrian Detector for images and videos using OpenCV. Pedestrian detection is a very important area of research because it can enhance the functionality of a pedestrian protection system in Self Driving Cars.
We can extract features like head, two arms, two legs, etc, from an image of a human body and pass them to train a machine learning model. After training, the model can be used to detect and track humans in images and video streams. However, OpenCV has a built-in method to detect pedestrians. It has a pre-trained HOG (Histogram of Oriented Gradients) + Linear SVM model to detect pedestrians in images and video streams.
A. Advantages
- Works in real time and for loaded videos also.
- Accuracy of detecting pedestrian is more.
V. HARDWARE AND SOFTWARE REQUIREMENTS
- CPU: Intel 2.1GHZ
- Memory: 4GB
- Disk: 100 GB
- Display: 14inch
- Coding: Python
- Platform: python 3.7 and above
- Tool: Spyder
- OS: Windows 7
- Libraries: TensorFlow, keras, opencv

Conclusion
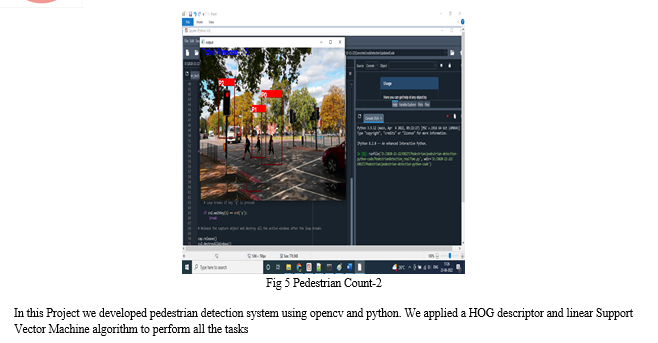
In this project we have developed pedestrian detection system using opencv and python. We applied a HOG descriptor and linear Support Vector Machine algorithm to perform all the tasks. And taking the video we detect the pedestrians and count them. Based on the threshold based on the pedestrian count we do control the signals.
References
[1] N. Diaz, J. Guerra, and J. Nicola. “Smart Traffc Light Control System”. In: 2018 IEEE 3rd Ecuador Tech. Chapters Meet, ETCM 2018, 2018. [2] I. Santos-González, P. Caballero-Gil, A. Rivero-García, and C. Caballero-Gil. “Priority and collision avoidance system for traffc lights”. Ad Hoc Networks, vol. 94, pp. 101931, 2019. [3] A. H. Akoum. “Automatic traffc using image processing.” Journal of Software Engineering and Applications, vol. 10, no. 9, pp. 765-776, 2017. [4] H. Joo, S. H. Ahmed and Y. Lim. “Traffc signal control for smart cities using reinforcement learning”. Computer Communications, vol. 154, pp. 324-330, 2020. [5] A. Dumka and A. Sah. Smart Ambulance Traffc Management System (SATMS)-a Support for Wearable and Implantable Medical Devices. Elsevier Inc., Amsterdam, 2020. [6] M. M. Elkhatib and A. S. Alsamna. “Smart Traffc Lights using Image Processing Algorithms”. In: 2019 IEEE 7th Palestinian International Conference on Electrical and Computer Engineering, pp. 1-6, 2019. [7] E. L. H. Imad. “Proposed Solutions for Smart Traffc Lights using Machine Learninig and Internet of Thing”. In: 2019 International Conference on Wireless Networks and Mobile Communications, pp. 1-6, 2019. [8] L. F. P. Oliveira, L. T. Manera and P. D. G. Luz. “Smart Traffc Light Controller System”. In: 2019 Sixth International Conference on Internet of Things: Systems, Management and Security, pp. 155- 160, 2019. [9] T. A. Kareem and M. K. Jabbar. Design and Implementation Smart Traffic Light Using GSM and IR. pp. 1-5, 2018. [10] M. B. Natafgi, M. Osman, A. S. Haidar and L. Hamandi. Smart Traffic Light System Using Machine Learning”.In: 2018 IEEE International Multidisciplinary Conference on Engineering Technology, pp. 1-6, 2019. [11] M. Z. Ismail, A. Z. A. Lutf and M. A. M. Roslan. “Smart traffc light for emergency vehicle by using arduiono”. AIP Conference Proceedings, vol. 2129, pp. 1-6, 2019. [12] Andreas, C. R. Aldawira, H. W. Putra, N. Hanafah, S. Surjarwo and A. Wibisurya. “Door security system for home monitoring based on ESp32”. Procedia Computer Science, vol. 157, pp. 673-682, 2019. [13] J. Redmon and A. Farhadi. YOLOv3: An Incremental Improvement, 2018. [14] Y. Jamtsho, P. Riyamongkol and R. Waranusast. “Real-time Bhutanese license plate localization using YOLO”. ICT Express, vol. 6, no. 2, pp. 121-124, 2019. [15] Y. Jamtsho, P. Riyamongkol and R. Waranusast. Real-time License Plate Detection for Non-helmeted Motorcyclist using YOLO. ICT Express, Amsterdam, 2020. [16] F. Koyanagi. ESP32 With ESP-Now Protocol, 2019.
Copyright
Copyright © 2023 Mahalakshmi V, Dr. Manjunath S . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET55178
Publish Date : 2023-08-04
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online