

Ijraset Journal For Research in Applied Science and Engineering Technology
Automatic Seed Sowing Grass Cutting and Pesticide Spraying
Authors: Mrs. P. Sri Padma , Kalyadapu Swetha, Palsum Madhavi, Vanga Yamini, Adithi Patel
DOI Link: https://doi.org/10.22214/ijraset.2024.61606
Certificate: View Certificate
Abstract
The purpose of this project is to perform 3 major activities in the field of agriculture land and they are 1 – Automation of Seed planting mechanism, 2 – Grass cutting mechanism, and 3 – Pesticides sprayer. All these 3 mechanisms are attached to the single moving mechanism and all above said activities will be controlled through wireless communication system designed with RF modules. This is achieved with the help of a remote-control unit, the vehicle can be moved in all directions and above said mechanisms can be controlled independently. The moving mechanism is designed to move in all directions through a remote-control unit constructed with RF modules. The grass cutting mechanism attached to the main structure of moving mechanism at its front portion can be energized or de-energized through same remote. The moving mechanism contains one small liquid tanker and with the help of a small Liquid or water pumping motor attached to the tank, pesticides in the form of liquid will be sprayed. The seed plating mechanism is constructed with solenoid coil and the seeds container is vibrated automatically during delivery of seeds through the pipe.
Introduction
I. INTRODUCTION
A. Aim Of The Project
In the ever - evolving landscape of agriculture and landscaping, the demand for increased productivity, resource efficiency, and sustainable practices has never been more critical. Traditional farming and landscaping methods, reliant on manual labor, are no longer sufficient to meet the growing needs of a rapidly changing world. This project seeks to tackle head-on the challenges associated with modern agriculture and landscaping, where time, efficiency, and resource optimization are paramount. By automating these labor-intensive tasks, we aim to optimize resource utilization, reduce human error, and enhance overall productivity. Technology did not advance rapidly in the past. So they were hand-seeding and trimming plants. However, technology is evolving. So, it's no longer Sunlight is required for seeding. By leveraging technology, one may sit in a cool spot and seed while monitoring the robot's movement. Today's agricultural field necessitates the development of new agricultural operations in order to increase performance efficiency. Farmers encounter a variety of challenges in agricultural activities including as seed sowing, waste plant cutting, and weeding. Furthermore, the equipment utilized to carry out the activities is quite heavy. The labor problem arises as a result of people movement in cities. In modern agriculture and landscaping, the labor-intensive tasks of seed sowing, grass cutting, and fertilizer spraying present significant challenges in terms of time, efficiency, and resource utilization. The current methods often require manual labor, are prone to human error, and can be resource-inefficient. Therefore, there is a pressing need for the development of an innovative and automated solution that can seamlessly perform these essential agricultural and landscaping tasks. To develop an automated agricultural system capable of seed sowing, grass cutting, and fertilizer spraying. The system should intelligently navigate fields, identify suitable areas for seeding, cutting, and fertilizing, and execute these tasks with precision. Integration of sensors for soil analysis, obstacle detection, and real-time monitoring is crucial for efficient and autonomous operation, contributing to increased agricultural productivity and resource optimization.
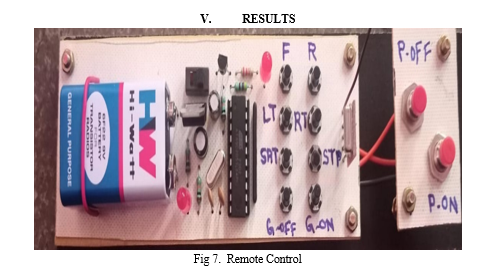
The growth or development of any nation in the world purely depends upon agricultural production. If proper machinery is used in this field, accuracy in the forming and quality in the production can be achieved. Traditional methods of sowing seeds manually and other activities like spraying the pesticides through sprinkler mechanisms, weed/grass cutting, etc. are done manually and consume a lot of time and it may not be accurate because of human errors. Therefore, this machine is designed to do the above jobs automatically. With the help of a remote-controlled unit designed with 8 control keys, entire machine movements can be controlled, the person who is operating this machine need not get down into the field, simply with the help of a handy remote-control unit, entire machine that performs various functions can be controlled from a certain distance. The conventional methods of seed planting with other activities, doing these jobs manually consumes a lot of time. In fact, the process needs to be carried out as early as possible in specific periods, especially during monsoons. To sow seeds in large areas of several acres, the process will become tedious and painful for the farmers.
To help the formers to avoid such painful activities and to complete the job in time, this kind of machine is essential for our Indian formers. In advanced countries like Russia and China, most of the formers are utilizing modern devices in their agricultural fields, which is the reason their forming growth rate is much better than our formers. In this regard, here advanced version of the prototype module is presented for the benefit of our formers. Maintaining uniformity in seed planting can increase the sowing efficiency, thereby it is essential to adapt latest agricultural machines for various applications, in this regard to overcome manual problems, and to save time, in addition to maintain accuracy, human involvement must be reduced and all these activities must left-over to the machines. The main purpose of developing this machine is to enhance the technology in the field of agriculture, to prove the theme practically this prototype module is constructed for demo purpose. It is not a real working system, but basic functions can be performed practically. The machine designed is quite useful for the large cultivated areas, since it is a prototype module, the machine is designed to plant seeds one after another in one row, but when it is converted in to engineering module, the machine can plant multiple seeds in multiple locations simultaneously. Similarly other activities also implemented simultaneously, there by many acres can be planted with seeds within less time. Entire mechanical transmission section is constructed with 4 DC motors, liquid spraying pump, solenoid coil, etc. These devices coupled with mainframe at various locations of the mechanism can perform various functions simultaneously. The entire machine along with seeds container and other mechanisms is designed to move freely in all directions through remote. With the help of 8 control keys interfaced with microcontroller in remote control unit, the machine moves in forward and reverse directions, in addition though the machine does not contain any steering mechanism it takes either left or right turns through same remote. Once the machine is positioned to plant seeds in one row, and by activating the start button from the remote-control unit, the machine starts performing its function.
II. BLOCK DIAGRAM
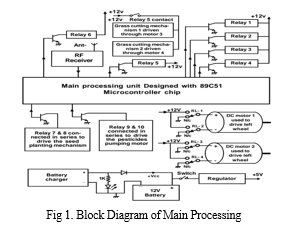
As per the block diagram the functional description begins with the Remote-control unit. This unit designed with 89c2051 microcontroller chip and programmed such that it generates 8 different command codes according to the activated control keys. These 8 control keys are interfaced with the microcontroller as input information source keys, whenever any key is activated, its corresponding digital code in the form of 8 bits data will be generated and delivered through its data output pin. In this IC, pin no. 3 is the data transmitting pin. Likewise, the chip is programmed to generate 8 different codes and depending up on the activated key the chip can identify it, because that particular key input pin will be grounded momentarily. As the processing chip is aimed to encode the data, internally it generates 8-bit code in the form of 1’s and 0’s.
The output of controller chip is fed to the input pin of RF transmitter. This device generates a high frequency of 433MHz which is used as carrier frequency, now the controller output (digital data) is fed to this high frequency as a modulated signal, this signal mixed with carrier signal and delivers through antenna. When the signal is delivered through antenna, the digital signal will be super imposed over the carrier and transmitted as modulated signal, means the carrier holds the digital code signal and carries to its destination, i.e. receiver. The receiver module receives the signal from transmitter through its antenna, demodulates the signal by which carrier will be eliminated and it is filtered to suppress the noise, with the help of a signal amplifier original signal will be strengthened and original code (Replica) will be generated as it is. Any information either in the form of analog or digital, it can be transmitted and received.
III. COMPONENTS
A. DC Motor
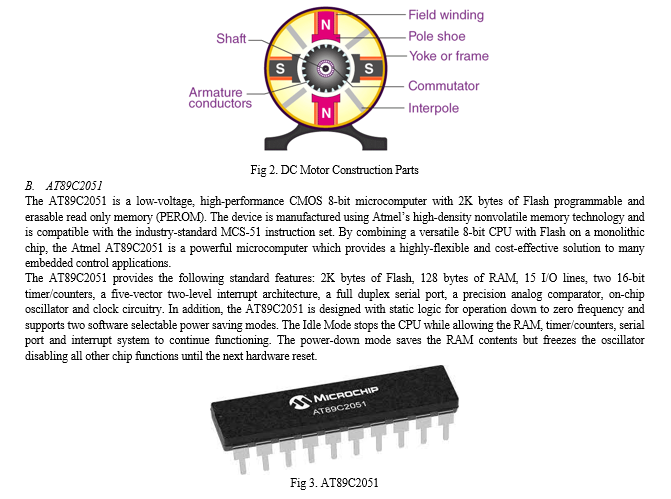
A DC motor is any of a class of rotary electrical machines that converts direct current electrical power into mechanical power. A coil of wire with a current running through it generates an electromagnetic field aligned with the center of the coil. The direction and magnitude of the magnetic field produced by the coil can be changed with the direction and magnitude of the current flowing through it. A simple DC motor has a stationary set of magnets in the stator and an armature with one or more windings of insulated wire wrapped around a soft iron core that concentrates the magnetic field. The windings usually have multiple turns around the core, and in large motors there can be several parallel current paths. The ends of the wire winding are connected to a commutator. The commutator allows each armature coil to be energized in turn and connects the rotating coils with the external power supply through brushes. We can conclude that any electric motor that is operated using direct current or DC is called a DC motor.
C. AT89C52
The AT89C52 is a low-power, high-performance CMOS 8-bit microcomputer with 8K bytes of Flash programmable and erasable read only memory (PEROM). The device is manufactured using Atmel’s high density non-volatile memory technology and is compatible with the industry standard 80C51 and 80C52 instruction set and pinout. The on-chip Flash allows the program memory to be reprogrammed in-system or by a conventional non-volatile memory programmer. By combining a versatile 8-bit CPU with Flash on a monolithic chip, the Atmel AT89C52 is a powerful microcomputer which provides a highly flexible and cost-effective solution to many embedded control applications.
D. Relay
A relay is an electrically operated switch. Many relays use an electromagnet to mechanically operate a switch, but other operating principles are also used, such as solid-state relays. Relays are used where it is necessary to control a circuit by a separate low-power signal, or where several circuits must be controlled by one signal. The first relays were used in long distance telegraph circuits as amplifiers: they repeated the signal coming in from one circuit and re-transmitted it on another circuit. Relays were used extensively in telephone exchanges and early computers to perform logical operations. A type of relay that can handle the high power required to directly control an electric motor or other loads is called a contactor. Solid-state relays control power circuits with no moving parts, instead using a semiconductor device to perform switching. Relays with calibrated operating characteristics and sometimes multiple operating coils are used to protect electrical circuits from overload or faults; in modern electric power systems these functions are performed by digital instruments still called "protective relays”. Magnetic latching relays require one pulse of coil power to move their contacts in one direction, and another, redirected pulse to move them back. Repeated pulses from the same input have no effect. Magnetic latching relays are useful in applications where interrupted power should not be able to transition the contacts.
F. LM7805 VOLTAGE REGULATOR IC
The LM7805 Voltage Regulator IC is a commonly used voltage regulator that finds its application in most of the electronics projects. It provides a constant +5V output voltage for a variable input voltage supply
Voltage regulators are very common in electronic circuits. They provide a constant output voltage for a varied input voltage. In this case the 7805 IC is an iconic regulator IC that finds its application in most of the projects. The name 7805 signifies two meaning, “78” means that it is a positive voltage regulator and “05” means that it provides 5V as output. So, our 7805 will provide a +5V output voltage. The output current of this IC can go up to 1.5A. But the IC suffers from heavy heat loss hence a Heat sink is recommended for projects that consume more current.
IV. WORKING
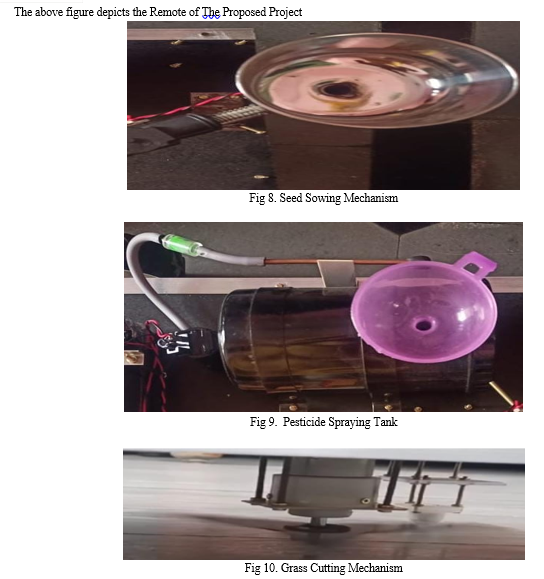
The Proposed Project requires the Keil Software to write the code. It is operated using the Remote Control. Whenever any key is pressed in the remote , the corresponding activity gets done. The signal is modulated while transmitting and demodulation happens at the receiver side. The Grass Cutting mechanism happens by rotating the blades at the down the kit. Pesticide Spraying Mechanism gets executed by spraying the water uniformly in one direction by the help of vibrating motor. Seed Sowing Mechanism gets executed by the solenoid . When the Solenoid vibrates it pushes towards itself so that there will be a free passage for dropping of seeds. The seeds gets dropped for every 30cms. The Moving Kit is designed in such a way that it can move freely in all directions.
Conclusion
In conclusion, the Automatic Seed Sowing, Grass Cutting, and Pesticide Spraying project represents a significant leap forward in agricultural automation. The automated seed sowing aspect ensures precise and uniform distribution, optimizing crop growth from the very beginning. The grass cutting feature not only maintains a neat and well-manicured field but also contributes to weed control, fostering a healthier crop environment. Additionally, the pesticide spraying functionality, guided by advanced algorithms and sensors, enables targeted and efficient pest management, minimizing environmental impact and reducing the need for excessive chemical usage. As the world is embracing the era of smart farming, the Automatic Seed Sowing, Grass Cutting, and Pesticide Spraying system stands as a testament to the potential of technology in revolutionizing the agricultural landscape.
References
[1] Danielsson, M.; Mahler, J.; Correa, C.; Goldberg, K. Linear Push Policies to Increase Grasp Access for Robot Bin Picking. In Proceedings of the IEEE 14th International Conference on Automation Science and Engineering (CASE), Munich, Germany, 20–24 August 2018; pp. 1249–1256. [2] Pantoja, S.; Dungan, P.; Guhan, P.; Sarkar, A.; Krishna, K.M. A deep reinforcement learning approach for dynamically stable inverse kinematics of humanoid robots. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, Macao, 5–8 December 2017; pp. 1818–1823. [3] Argade Pratik Pralhad1, Bhosale Swapnil Bhagwan, \"Solar powered automatic grass cutter and pesticide spreading robot\", International Research Journal of Engineering and Technology (IRJET), May -2017. [4] Jayakrishna PV S, Surya Vamsi Reddy M, Jaswanth Sai N, Susheel N, Peeyush K P “Autonomous Seed Sowing Agricultural Robot”, IEEE 2020. [5] R. Rajesh, V. Vimal Kingsley, M. Selva panda, G. Niranjan, G. Varun Harshith, “Design and Fabrication of Solar Pesticide Sprayer”, International Journal of Innovative Research in Science, Engineering and Technology May2016). [6] R. Sarath, S. Arun Kumar, Manish Kumar, R. Balaram Sai, “Solar Based Pesticide Sprayer Using Bluetooth Control”, International Journal of Electronics Engineering Volume 11, Issue 1 pp. 352-355 Jan 2019-June 2019) [7] Ranjitha B, et al (2019) Solar Powered autonomous multipurpose agricultural robot using Bluetooth /android app. In: 2019 3rd International conference on Electronics, Communication and Aerospace Technology (ICECA), pp 872–877. IEE
Copyright
Copyright © 2024 Mrs. P. Sri Padma , Kalyadapu Swetha, Palsum Madhavi, Vanga Yamini, Adithi Patel. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61606
Publish Date : 2024-05-05
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online