

Ijraset Journal For Research in Applied Science and Engineering Technology
BLDC Motor based Air Dessert Cooler
Authors: Sanidhya Awachat, Niyanta Dadilwar, Devanshu Dhenge, Kshitij Kinake, Avish Dhamange, Bhavesh Dharmik
DOI Link: https://doi.org/10.22214/ijraset.2024.62050
Certificate: View Certificate
Abstract
This paper proposes a new position sensorless drive for brushless DC (BLDC) motors.Growing need for high productivity is placing new demands on mechanisms connected with electrical motors. The demand for low cost Brushless DC (BLDC) motor has increased in industrial applications. A simple BLDC motor control algorithm for low cost motor drive applications using general purpose microcontrollers has been created and presented in this paper. Proposed design will allow the user to rotate the motor either clockwise or counter clockwise direction. Depending on the rotor position the sensor will give response to the controller circuit. Then the controller circuit will fix the direction of current following to the stator. The design controller circuit is also implemented. The overall design consists of microcontroller circuit, logic gates, switching devices (MOSFET/BJT), BLDC motor, sensors.
Introduction
I. INTRODUCTION
Brushless DC (BLDC) motors have the advantage of higher power density than other motors such as induction motors because of having no copper losses on the rotor side and they do not need mechanical commutation mechanisms as compared with DC motors, which results in compact and robust structures. Owing to these features, BLDC motors have become more popular in the applications where efficiency is a critical issue, or where spikes caused by mechanical commutation are not allowed. A BLDC motor requires an inverter and a rotor position sensor to perform commutation process because a permanent magnet synchronous motor does not have brushes and commutators in DC motors. However, the position sensor presents several disadvantages from the standpoints of drive’s cost, machine size, reliability, and noise immunity. As a result, many researches havebeen reported for sensorless drives that can control position, speed, and/or torque without shaft-mounted position sensors.
The global energy demand increasing tremendously with faster pace, need of renewable and sustainable energy resources became important. In view of this efficient electrical systems needed with greater reliability. With increase in demand of energy in every practical sustainable environment, energy saving has become an important parameter while choosing a device for either commercial or domestic application. The energy saved at the operation of one device can be used for other device. Another important parameter for the selection of a device is the cost and level of automation of a device applicable. Cost effectiveness has proved to be important parameter even for automation needs to be reached to every user during summer air cooling systems are very much useful in reducing the room temperature. In general BLDC motors are considered high performance motors capable of delivering large amounts of torque over speed a wide speed range. Air coolers use the process of evaporation of water to cool the air when it passes through the air cooler, as some particle on the surface of the water are carried away giving the heat present in the air and thus cooling the air utilizing the simple property of the latent heat of water.
II. MODELLING OF BLDC MOTOR
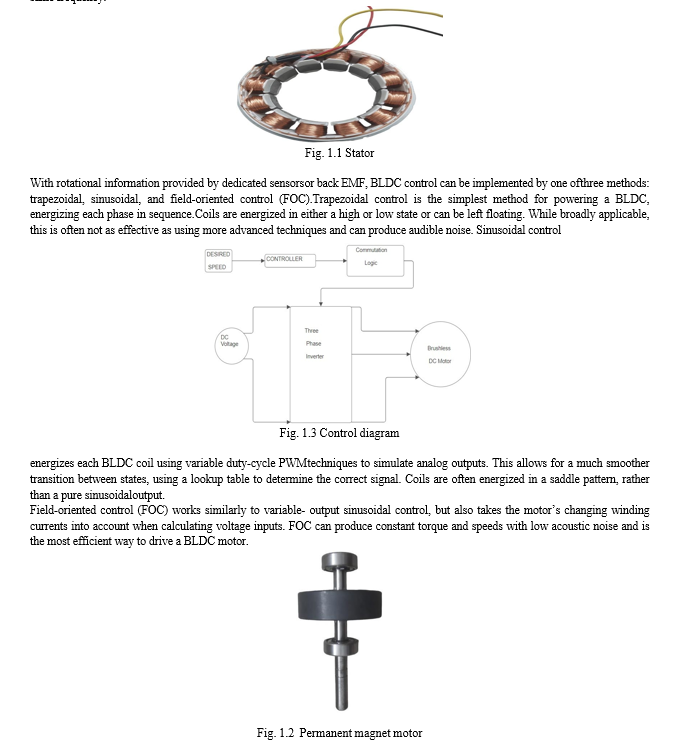
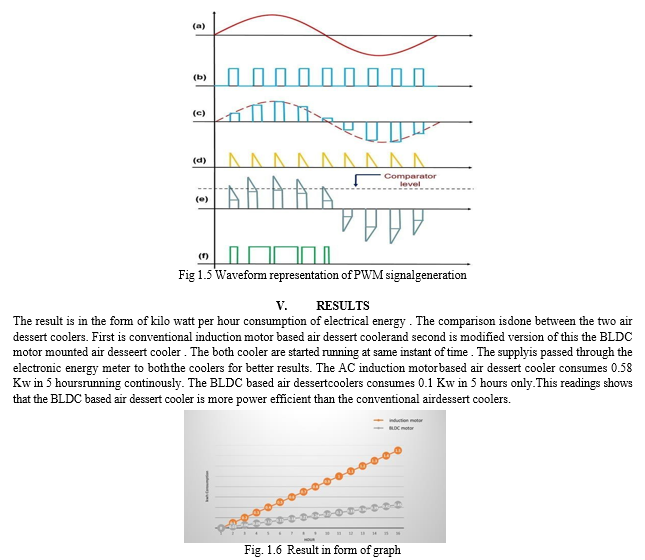
Brushless DC electric motors also known as electronically commutated motors. Primary efficiency is a most important feature for BLDC motors. Because the rotor is the sole bearer of the magnets and it doesn't require any power. i.e. no connections, no commutator and no brushes. In place of these, the motor employs control circuitry. To detect where the rotor is at certain times, BLDC motors employ along with controllers, rotary encoders or a Hall sensor. Construction of Brushless DC motor. In this motor is Brushless motor does not have any current carrying commutators. The field inside a brushless motor is switched through an amplifier which is triggered by the commutating device like an optical encoder. The layout of a DC brushless motor can vary depending on whether it is in “Out runner” style or “In runner” style. The field magnet is a drum rotor which rotates around the stator. This style is preferred for applications that require high torque and where high rpm isn’t a requirement. The stator is a fixed drum in which the field magnet rotates. This motor is known for producing less torque than the out-runner style, but is capable of spinning at very high rpm., the permanent magnets attach to the rotor. The current-carrying conductors or armature windings are located on the stator. They use electrical commutation to convert electrical energy into mechanical energy. The main design difference between a brushed and brushless motors is the replacement of mechanical commutator with an electric switch circuit.
A BLDC Motor is a type of synchronous motor in the sense that the magnetic field generated by the stator and the rotor revolve at the same frequency.
III. SWITCHED MODE POWER SUPPLY (SMPS)
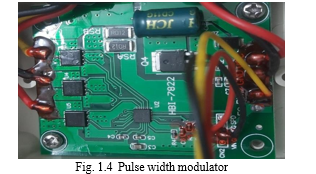
SMPS regulator converts unregulated DC input voltage to a regulated and smooth DC output voltage at different voltage levels. So that the working of SMPS is based on the Chopper principle. The block diagram of the switch mode power supply is shown in. This power supply contains a rectifier, a DC/DC converter, and a switching circuit.
Switch mode power supply provides further advantages for the isolation between the mains and human body. DC/DC converter is chopped and switched the DC voltage. This chopped voltage is then boasting very high speed, high frequency spikes are present at the output. These spikes are suppressed and the regulated voltage is obtained at the output.
A. Sensorless Drive Concept
The sensorless BLDC motor drive concept shown in Figure was chosen. The sensorless rotor position technique developed detects the zero-crossing points of back-EMF induced in the motor windings. The phase back-EMF zero- crossing points are sensed while one of the three-phase windings is not powered. The obtained information is processed in order to commutate the energized phase pair and control the phase voltage, using pulse width modulation (PWM).
B. Sensorless BLDC Motor Control
Sensorless BLDC motor control sometimes called sensorless trapezoidal control of BLDC motor uses back EMF (BEMF) for determining the location of the motor's rotor (the motor's rotating part) with respect to the motor's stator (the stationary part).
IV. PULSE WIDTH MODULATION (PWM)
The pulse width modulation is a proven effective technique that is used to control semiconductor devices. Pulse width modulation or PWM is a commonly used control technique that generates analog signals from digital devices such as microcontrollers. The signal thus produced will have a train of pulses, and these pulses will be in the form of square wave. Pulse width modulation reduces the average power delivered by an electrical signal by converting the signal into discrete parts. In the PWM technique, the signal’s energy is distributed through a series of pulses rather than a continuously varying (analogue) signal. The message signal and the carrier waveform is fed to a modulator which generates PWM signal. This pulse amplitude modulated signal is fed to the non-inverting terminal of the comparator. A ramp signal generated by the sawtooth generator is fed to the inverting terminal of the comparator. These two signals are added and compared with the reference voltage of the comparator circuit. The level of the comparator is so adjusted to have the intersection of the reference with the slope of the waveform. The PWM pulse begins with the leading edge of the ramp signal and the width of the pulse is determined by the comparator circuit. The width of the PWM signal is proportional to the omitted portion of the ramp signal by the comparator level. The figure below will help you to understand in a better way how PWM signal is generated by the comparator:) waveform. The main advantage of PWM is that power loss in the switching devices is very low. When a switch is off there is practically no current, and when it is on and power is being transferred to the load, there is almost no voltage drop across the switch. Power loss, being the product of voltage and current, is thus in both cases close to zero. PWM also works well with digital controls, which, because of their on/off nature, can easily set the needed duty cycle. PWM has also been used in certain communication systems where its duty cycle has been used to convey information over a communications channel. In electronics, many modern microcontrollers (MCUs) integrate PWM controllers exposed to external pins as peripheral devices under firmware control. These are commonly used for direct current (DC) motor control in robotics, switched-mode power supply regulation, and other applications.
References
[1] Ozturk Tosun ,Necibe Fusun Serteller , Gokhan Yalcin , “Comprehensive Design and Optimization of Brushless Direct Current Motor for the Desired Operating Conditions”, 2021 25th International Conference Electronics , DOI:10.1109/IEEECONF52705.2021.9467459. [2] Sumeet Thakur Singh, Amit Kumar Jain(Indian Institute of Technology Delhi), “Improved Direct Torque Controlled IPM Synchronous Motor using variable band 12 sector control in two level inverter”, 2016 IEEE 6th International Conference on Power Systems (ICPS) , DOI:10.1109/ICPES.2016.7584064 . [3] M. Deepak (SRM Institute of Science and Technology), “A Review of BLDC Motor: State of Art, Advanced Control Techniques, and Application”, January 2022IEEE Access 10:1-1, DOI:10.1109/ACCESS.2022.3175011. [4] Bogdan Virlan (Gheorghe Asachi Technical University of Iasi), “Design and Optimization of a BLDC Motor for Small Power Vehicles”, 2021 International Conference on Electromechanical and Energy Systems (SIELMEN), DOI:10.1109/SIELMEN53755.2021.9600327. [5] José Carlos Gamazo-Real,* Ernesto Vázquez- Sánchez, and Jaime Gómez-Gil, “ Position and Speed Control of Brushless DC Motors Using Sensor less Techniques and Application Trends” 2010; 10(7): 6901–6947ce- Pub med center 2010 Jul 19. DOI: 10.3390/s10070690
Copyright
Copyright © 2024 Sanidhya Awachat, Niyanta Dadilwar, Devanshu Dhenge, Kshitij Kinake, Avish Dhamange, Bhavesh Dharmik. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET62050
Publish Date : 2024-05-13
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online