

Ijraset Journal For Research in Applied Science and Engineering Technology
Combined RF-Based Drone Detection and Classification
Authors: Meeryalkar Rakesh, Dr. G. Venkata Rami Reddy
DOI Link: https://doi.org/10.22214/ijraset.2023.55928
Certificate: View Certificate
Abstract
Despite various positive uses, drones are also utilised for illegal purposes like as drug trafficking, weapon smuggling, and posing dangers to security-sensitive locations such as airports and nuclear power plants. Existing drone localisation and neutralisation solutions are predicated on the drone having previously been discovered and categorised. Despite significant progress in the sensor sector over the last decade, no viable drone detection and classification approach has been suggested in the literature. The frequency signature of the sent signal is used in this research to identify and classify drones using radio frequency (RF). Using commercial drones, we built an unique drone RF dataset and provided a comprehensive comparison of a two-stage and integrated detection and classification framework. Both frameworks\' detection and classification results are demonstrated for a single-signal and simultaneous multi-signal situation. We demonstrate that the You Only Look Once (YOLO) framework outperforms the Goodness-of-Fit (GoF) spectrum sensing framework in a simultaneous multi-signal situation, and that it outperforms the Deep Residual Neural Network (DRNN) framework in classification.
Introduction
I. INTRODUCTION
The drone business has seen considerable technical advancement. Drones are increasingly outfitted with cutting-edge (SoA) technology and sensors including GPS, LIDAR, radar, and vision sensors. These technologies make it possible for drones to serve a wide range of applications, including cinematography, farming, surveillance, and leisure activities. Drones outfitted with innovative technology offer enormous potential for inspecting damaged infrastructure, delivering emergency help, and conducting search and rescue operations in distant and inaccessible areas.
Aside from these helpful uses, drones are sometimes employed for unlawful operations that endanger public safety. Violations of public privacy, drug trafficking, weapon smuggling, bombing, and breaching security-sensitive locations such as airports and nuclear power facilities are among the criminal actions.
To counter a drone assault, many Counter Unmanned Aircraft Systems (C-UAS) have been developed, which are primarily split into two categories: hard and soft interception (kinetic or non-kinetic solution). Intercepting a drone with I a trained bird of prey, (ii) a net gun [1], (iii) a laser beam, and (iv) a weapon are among the kinetic options. Non-kinetic options include I GPS spoofing [1] and (ii) RF jamming.
Regardless of the approach adopted for any situation, the existence of a drone should be recognised and identified in advance. It is difficult to detect and categorise a drone automatically. The following are some prominent technical ways for detecting and classifying a drone: I radar detection, (ii) video detection, (iii) acoustic detection, and (iv) RF-based detection. [2] presents a detailed literature overview of the current SoA Machine Learning-based drone detection and classification employing these technologies. Researchers have recommended combining several methods [3] for UAV detection and categorization. To identify and categorise a drone, radar detection uses the backscattered RF signal. Due to the narrow radar cross section of a mini-drone, conventional radar systems will fail to detect it (RCS).
To address this issue, researchers used a multistatic radar [4] or a Frequency Modulated Continuous Wave (FMCW) radar [5], [6] to identify and categorise a Quadcopter or Multi-rotor UAV's micro-Doppler signature. [6] provides a comprehensive analysis of the detection and classification capabilities of modern SoA FMCW radars.
Researchers presented numerous drone detection techniques employing this technology in [7]-[9]. Video/image detection covers both visual and thermal detection. This approach detects drones by examining their colour, shape, and edge information [7]. The detecting approach is reliable, but it needs a line of sight (LOS) between the drone and the camera, and its performance is heavily reliant on lighting and weather conditions such as dust, rain, fog, and cloud. Furthermore, the similarity of a bird to a drone makes it more difficult for a video detector to identify. The authors of [8] used a drone's motion and trajectory information to distinguish it from a bird. [10] provides a quick outline of the frameworks capable of distinguishing a drone from a bird. The acoustic detection system detects the presence of flying drones by employing microphones to detect their sound.
II. LITERATURE REVIEW
A. A Review Of Security Threats Of Unmanned Aerial Vehicles And Mitigation Steps
Over the past decade, the usage of unmanned aerial vehicles (UAVs) for a wide variety of applications has grown tremendously. The recent commercial availability of a new generation of tiny unmanned aerial vehicles (UAVs) has highlighted the rising danger presented by these machines. This paper aims to review the security threats posed by unmanned aerial vehicles (UAVs) in areas such as terrorist attacks, illegal surveillance and reconnaissance, smuggling, electronic snooping, and mid-air collisions, as well as discuss the categories of UAV intrusions in terms of intention and level of sophistication of the operators. Mitigation measures for UAV intrusions are also discussed, with a focus on geofencing, detection systems (radar, acoustic, radio frequency (RF) emission, and electro-optical (EO) sensing), electronic defences (command link jamming and appropriation, as well as Global Navigation Satellite System (GNSS) jamming and spoofing), and kinetic defences (shooting down UAVs and net capture using interceptor UAVs).
B. Machine Learning-Based Drone Detection And Classification: State-Of-The-Art In Research
This study provides an in-depth assessment of the existing research on drone detection and classification using machine learning with several modalities. Because of the increasing growth of commercial and recreational drones, as well as the accompanying danger to airspace safety, this study topic has evolved in recent years. Radar, optical, auditory, and radio-frequency sensor devices are among the technologies addressed. The overall conclusion of this research is that machine learning-based categorization of drones seems to be promising, with several successful individual contributions. However, the majority of research is experimental, and the results of various articles are difficult to compare. A generic requirement-driven specification for the issue of drone detection and classification, as well as reference datasets to aid in assessing alternative solutions, are currently lacking.
C. An Amateur Drone Surveillance System Based On The Cognitive Internet Of Things
Drones, sometimes known as mini-unmanned aerial vehicles, are gaining popularity because to their multiple uses in communications, photography, agriculture, surveillance, and a variety of public services. However, the use of amateur drones raises a number of safety, security, and privacy concerns. To meet these issues, amateur drone surveillance has emerged as a critical but mostly neglected area. In this essay, we will first offer a quick assessment of the most recent research on amateur drone surveillance. Then, we offer Dragnet, a concept that adapts the rapidly developed Cognitive Internet of Things architecture for amateur drone surveillance. Following that, we go into the major enabling approaches for Dragnet in depth, as well as the technical obstacles and unresolved concerns. Furthermore, we provide an illustrative case study on the detection and classification of approved and illegal amateur drones, such as when an important event is taking place and only authorised drones are permitted to fly above.
D. Classification Of Loaded/Unloaded Micro-Drones Using Multistatic Radar
This letter reports early findings from a study that used multistatic radar and micro-Doppler analysis to identify and distinguish between micro-drones hovering with various payloads. Two relevant characteristics associated to the centroid of the micro-Doppler signature were found and utilised to conduct classification, with the extra advantage of employing information from a multistatic radar rather than a standard monostatic system being investigated. For the categorization of hovering micro-drones, very high performance with accuracy exceeding 90% has been achieved.
E. Detection And Classification Of Multirotor Drones In Radar Sensor Networks: A Review
A new generation of low-cost, compact unmanned aerial vehicles (UAVs) is now accessible as a result of recent technology developments. Small unmanned aerial vehicles, or drones, are allowing unprecedented uses, but new concerns are emerging as a result of their potential abuse (e.g., drug smuggling, terrorist attacks, espionage). The key issues associated with the topic of drone identification are described in this research, which include detection, potential verification, and classification. An overview of the most important technologies is offered, which in current surveillance systems are comprised of a network of geographically dispersed sensors to provide complete coverage of the monitored area. The major emphasis is on the frequency modulated continuous wave (FMCW) radar sensor, which is a vital technology because to its cheap cost, ability to function at relatively long distances, and excellent tolerance to light and weather conditions. This study presents a review of the available research on the most promising methodologies used in the various stages of the identification process, namely detection of suspected drone existence, target verification, and categorization.
III. METHODOLOGY
Deep Neural Network (DNN)-based classifiers are used to recognise and identify a drone using frequency signatures. The author created a dataset utilising three commercial drones and detected and identified them using a basic feedforward DNN. Using a Convolutional Neural Network, the author demonstrated detection, identification, and classification on the same dataset (CNN). These investigations were conducted on a small dataset, and the effect of noise on detection performance was not investigated. Furthermore, the efficacy of detection in the presence of numerous signals or interference was not studied.
A. Disadvantages
- No strong drone detection and classification methods have yet been presented in the literature.
- A lower categorization rate.
We demonstrated an RF-based drone identification method based on GoF spectrum sensing and DoA estimation using the MUSIC algorithm. The performance of feature extraction and drone signal identification utilising wideband CFAR-based energy detection is demonstrated. A DRNN architecture was used to classify drone signals. The categorization was carried out under the assumption that a signal has previously been discovered by a spectrum sensing technique. Our earlier studies did not give a full solution for drone identification and classification based on RF fingerprinting, which we address in this study.
B. Advantages
- We demonstrate that the YOLOV5 framework improves detection performance.
- Both approaches performed well in terms of detection and classification. Because the categorization is done supervised, the performance may differ in the presence of unknown or newer drone signals, as we discussed in depth in the restriction section.

C. Modules
To carry out the aforementioned project, we created the modules listed below.
- Data Exploration: Using this module, we will load data into the system.
- Processing: Using this module, we will read data for processing.
- Splitting Data Into Train & Test: Using this module, data will be divided into train & test.
- Model Generation: Using this module, we will build the model - YOLOV5,DRNN. Algorithms accuracy calculated.
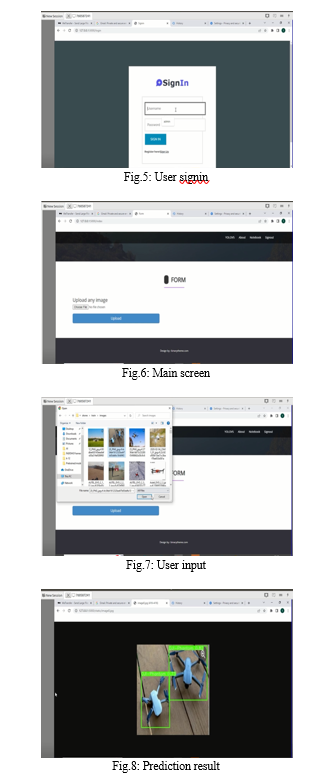
- User Signup and Login: Using this module will result in registration and login.
- User Input: Using this module will result in prediction input.
- Prediction: The final predicted value will be presented.
IV. IMPLEMENTATION
A. Algorithms
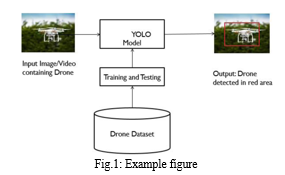
YOLOV5: YOLO, which stands for "You Only Look Once," is an object identification technique that splits pictures into grids. Each grid cell is in charge of detecting items inside itself. Because of its speed and precision, YOLO is one of the most well-known object detection techniques. The YOLOv5 Architecture as a Convolutional Neural Network Scheme (CNN). The BackBone, Neck, and Head are the main components. CSPNet is used in the BackBone to extract features from the photos used as input images. The Neck is used to create the pyramid feature.
DRNN: A deep residual network (deep ResNet) is a sort of specialised neural network that aids in the handling of more complex deep learning tasks and models. It has attracted a lot of attention at recent IT conferences and is being explored for use in deep network training. Deep residual networks, such as the famous ResNet-50 model, are convolutional neural networks (CNNs) with 50 layers. A Residual Neural Network (ResNet) is a kind of Artificial Neural Network (ANN) that builds a network by stacking residual blocks on top of each other.

Conclusion
In this research, we used two phases and integrated detection and classification algorithms to conduct drone signal detection, spectrum localization, and classification. We employed GoF sensing for detection and the DRNN framework for classification in the two-stage method. To conduct the integrated drone RF signal identification, spectrum localization, and classification, the YOLO-lite framework was rebuilt from the ground up. A comprehensive performance comparison of both strategies is provided using a unique drone dataset created specifically for this research. Both approaches performed well in terms of detection and classification. Because the categorization is done supervised, the performance may differ in the presence of unknown or newer drone signals, as we discussed in depth in the restriction section. In the future, we will study unsupervised situations since we are interested in establishing a robust framework that can recognise and categorise any drone signals regardless of the dataset used to train it.
References
[1] D. Sathyamoorthy, “A review of security threats of unmanned aerial vehicles and mitigation steps,” J. Defence Security, vol. 6, no. 1, pp. 81–97, 2015. [2] B. Taha and A. Shoufan, “Machine learning-based drone detection and classification: State-of-the-art in research,” IEEE Access, vol. 7, pp. 138669–138682, 2019. [3] G. Ding, Q. Wu, L. Zhang, Y. Lin, T. A. Tsiftsis, and Y.-D. Yao, “An amateur drone surveillance system based on the cognitive Internet of Things,” IEEE Commun. Mag., vol. 56, no. 1, pp. 29–35, Jan. 2018. [4] F. Fioranelli, M. Ritchie, H. Griffiths, and H. Borrion, “Classification of loaded/unloaded micro-drones using multistatic radar,” Electron. Lett., vol. 51, no. 22, pp. 1813–1815, 2015. [Online]. Available: https://ietresearch.onlinelibrary.wiley.com/doi/abs/10.1049/el.2015.3038 [5] J. Drozdowicz et al., “35 GHz FMCW drone detection system,” in Proc. 17th Int. Radar Symp. (IRS), 2016, pp. 1–4. [6] A. Coluccia, G. Parisi, and A. Fascista, “Detection and classification of multirotor drones in radar sensor networks: A review,” Sensors, vol. 20, no. 15, p. 4172, 2020. [Online]. Available: https://www.mdpi.com/1424- 8220/20/15/4172 [7] Z. Zhang, Y. Cao, M. Ding, L. Zhuang, and W. Yao, “An intruder detection algorithm for vision based sense and avoid system,” in Proc. Int. Conf. Unmanned Aircr. Syst. (ICUAS), 2016, pp. 550–556. [8] S. R. Ganti and Y. Kim, “Implementation of detection and tracking mechanism for small uas,” in Proc. Int. Conf. Unmanned Aircr. Syst. (ICUAS), 2016, pp. 1254–1260. [9] R. Stolkin, D. Rees, M. Talha, and I. Florescu, “Bayesian fusion of thermal and visible spectra camera data for mean shift tracking with rapid background adaptation,” in Proc. IEEE SENSORS, 2012, pp. 1–4. [10] A. Coluccia et al., “Drone-vs-bird detection challenge at IEEE AVSS2019,” in Proc. 16th IEEE Int. Conf. Adv. Video Signal Based Surveillance (AVSS), 2019, pp. 1–7.
Copyright
Copyright © 2023 Meeryalkar Rakesh, Dr. G. Venkata Rami Reddy . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET55928
Publish Date : 2023-09-29
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online