

Ijraset Journal For Research in Applied Science and Engineering Technology
Comprehensive Survey of Autonomous Driving Systems and Advanced Technologies: Literature Review, Gap Analysis and Future Directions
Authors: Raj Awate, Amartya Pardeshi, Baljeet Singh, Pritesh Malpani, Dr. Prajakta Khadkikar
DOI Link: https://doi.org/10.22214/ijraset.2024.61360
Certificate: View Certificate
Abstract
This article presents a literature review of numerous research papers focusing around the topic ‘Development of Autonomous Driving Vehicle System’, and related works. The advent of autonomous driving technology has revolutionized the automotive industry, promising enhanced safety, efficiency, and convenience on the road. A critical aspect of autonomous vehicle development is the assessment of their performance in a controlled and risk-free environment. Virtual environments, enabled by cutting-edge technologies, offer a dynamic plat- form for rigorous testing and training of autonomous vehicles. This paper aims to study and analyze different approaches and methodologies that are implemented for the development of Autonomous Driving Systems(ADS). Some of the primary aspects that are found common in most papers are Virtual Environment, pedestrians’ safety, privacy, security, real-time data presentation, precise torque control, Reinforcement Learning, Deep Learning, Hardware-in-the-loop (HIL)- simulation, Model- in-the-loop (MIL)-simulation, etc. The sole idea of extracting valuable information from a virtual environment ensures a sense of safety as there are no humans involuntarily involved to take part in the development. However, the data extracted from the virtual environment must be highly accurate and reliable, as it will be trained and tested in real environments post deployment. Collision scenarios need to be carefully studied, for which relative positioning of vehicle and pedestrians should be taken into account, so as to examine their velocities, time to collision, and appropriately taking actions. Above all, it should be noted that the safety of human lives holds the highest priority, if a method suggests a high risk factor for a human life, then it should be either discarded, or improved.
Introduction
I. INTRODUCTION
The vision of autonomous driving, once confined to the realm of science fiction, has rapidly evolved into a tangible reality, promising to reshape the future of transportation. With the potential to enhance road safety, reduce traffic congestion, and revolutionize the concept of personal mobility, autonomous vehicles are at the forefront of technological inno- vation. However, as this transformative technology progresses, it becomes increasingly essential to ensure its robustness and reliability. Autonomous Driving System entails least human involvement, in order to determine a safe path to traverse, overcome obstacles, apply brakes when necessary, and basi- cally automate the necessary aspects required to drive a car. In a specific context, AVs, also referred to as self-driving, driver- less, or robotic cars, are automobiles capable of autonomous driving and navigation, devoid of human control. They achieve this through the utilization of sensing technologies like radar, the Global Positioning System (GPS), and computer vision, coupled with control systems, i.e., sensors. In a broader sense, as outlined by the National Highway Traffic Safety Admin- istration (NHTSA), AVs encompass vehicles where at least one critical safety control function, such as steering, accelera- tion/deceleration, or braking, is executed without direct human input. These vehicles exhibit varying levels of automation, aiming to either assist or entirely replace human drivers by assuming full control of the vehicle. Furthermore, we delve into the development of accident and road obstacle notification models, essential for enhancing the safety and reliability of autonomous driving systems. These models are designed to proactively identify and respond to potential hazards, whether they be other vehicles, pedestrians, or unexpected obstacles on the road. In this process, the user’s personal data, such as facial image data, car name plates, contact information, etc. might be vulnerable, as it is subject to get leaked. It is necessary to avoid this leakage, and maintain security while transmitting notifications over the network. Some of the essential features that come into play in Autonomous Driving systems are listed below,
- Autonomous Vehicle (AV): A self-driving or driverless vehicle capable of navigating and operating on roads with- out human intervention.
- Artificial Intelligence (AI): The technology that enables autonomous vehicles to perceive and interpret their surroundings and also make intelligent decisions based on the data present
- LIDAR (Light-Detection and Ranging Lidar): A remote sensing technology that uses laser light to measure distances and create detailed 3D maps of the environment.
- Radar: A sensor that uses radio waves to detect objects and their distances from the vehicle, often used for object detection and tracking.
- Cameras: Visual sensors that capture images and video to provide information about the vehicle’s surroundings
- Sensor Fusion: The process of integrating data from multiple present sensors (e.g., LIDAR, radar, cameras) to create a comprehensive view of the environ- ment.
- GPS (Global Positioning System): A satellite-based navigation system used for determining the vehicle’s position and route planning.
- HD Maps: High-definition maps that provide detailed information about road geometry, lane mark- ings, and other important features for autonomous vehicles.
- V2X Communication: Vehicle-to-Everything(V2E) communi- cation, including V2V (vehicle-to-vehicle) and V2I (vehicle- to-infrastructure), which enables vehicles to communicate with each other and with infrastructure for improved safety and traffic management
- Path Planning: The process of gen- erating a safe and efficient path for the autonomous vehicle to follow, considering the environment and traffic conditions.
- Obstacle Detection and Avoidance: Technologies and algorithms that enable the vehicle to detect and avoid obstacles and potential collisions.
- Deep Learning(DL): A subset of machine learning(ML) that uses artificial neural networks to process complex data, often used in perception and decision- making for autonomous vehicles.
- Reinforcement Learning: A type of machine learning where the system learns through trial and error, receiving rewards or penalties for its actions.
- Ethics and Safety: The ethical and safety considerations related to autonomous driving, including decision-making in critical situations
- Regulations and Standards: Government regulations and industry standards that govern the development and operation of autonomous vehicles.
- Simulation and Testing: The use of virtual environments and testing facilities to assess the performance and safety of autonomous vehicles.
- Ride-Sharing and Mobility Services: The integration of au- tonomous vehicles into ride-sharing and mobility-as-a-service platforms.
- Liability and Insurance: Legal and insurance considerations in the event of accidents or failures involving autonomous vehicles.
These terms provide with a comprehensive overview of the key concepts and technologies associated with autonomous driving.
II. LITERATURE SURVEY
TABLE I
|
Sr. No |
Name of Paper |
Author |
Current State |
Desired State |
|
1 |
Deep Learning(DL) Algorithm using Virtual Environment Data for Self Driving Cars |
Juntae. Kim, Geun Young Lim, Bokyeong Kim, Youngi Kim,Changseo k Bae. |
Does not consider the possibility of V2V and V2P collisions. |
It is expected to calculate the risk factor , and apply brakes according ly. |
|
2 |
A study on building a ‘Real-Time Vehicle Accident and Road Obstacle Notification Model’ using AI CCTV. |
Chaeyoung Lee, Hyomin Kim, Sejong Oh, Illchul Doo. |
Image data is sent to users within 5 km radius, due to this personal sensitive data like facial images, car name plates, etc. might get leaked. |
Framewo rk should be built such that the privacy of users is ensured. |
|
3 |
Enhancing Autonomous Vehicle Lateral Control: A Linear Complementar ity Model- Predictive Control Approach |
Ning Ye, Duo Wang, Yong Dai. |
Integration of electric steering system into vehicle dynamics for better and precise torque control. Wet roads, temperatures, etc. are not considered. |
Conditio ns such as wet roads can significan tly affect the torque control due to inconsiste ncy in friction, so it is essential to update the constraints |
|
4 |
Probabili stic Semantic Mapping for Autonomou s Driving in Urban Environme nts |
Hengyua n Zhang, David Paz , Qinru Li ,Shashank Venkatram ani, Hao Xiang and Henrik I. Christensn. |
Generates only static components of the environment Due to this, the map may get out-dated very soon. . |
This paper aims to achieve accurate map generation. An efficient algorithm that extracts recently updated information must be formulated. |
|
5 |
Improvin g the Performanc e of Autonomou s Driving through Deep Reinforcem ent Learning |
Akshaj Tammewa , Nikita Chaudhari, Bunny Saini , Divya Venkatesh, Ganpathiraj u Dharahas , Deepali Vora , Shruti Patil, Ketan Kotecha and Sultan Alfarhood. |
The concept of Reinforceme nt Learning (RL) aids to implement autonomous driving in dynamically changing environments . |
It works best in really brief training periods. However, if a DQN is properly trained with ε-decay, it yields consistent results, indicating the possibility of much better performance over extended training times. |
|
6 |
SLAV- Sim: A Framework for Self- Learning Autonomou s Vehicle Simulation |
Fumiko Ohori, Hiro zumi Yamaguchi Takeshi Matsumura and Satoko Itay |
It exploits the individual movement patterns of AGVs and uses artificial intelligence methods to capture individual parts and trajectories and feed RSSI from access points |
SLAV- Sim allows you to adjust reward and punishment rates based On initial results and add new scenarios, as shown in previous work on similar simulators. |
|
7 |
Machine- Learning- Based Access Point Selection(AP S) Strategy for Automated Guided Vehicles in Smart Factories |
Fumiko Ohori , Hirozumi Yamaguc hi, Satoko Itaya and Takeshi Matsumur a |
One of the challenges is to ensure minimal communica tion downtime during the connection change process to enable effective monitoring and control of AGVs. |
It leverages the unique movement patterns of AGVs and uses machine learning techniques to collect RSSI position, trajectory and orientation data from access points. |
|
8 |
Design of a Collaborative Vehicle Formation Control Simulation Test System |
Zhijing Xu, Pengren Ding, Yuqiog Zhang, and Fangze Tu. |
Solve one of the most difficult problems in self-driving cars – testing complex scenarios for self- driving applications . |
This system facilitates data exchange between hardware systems, reproduces and evaluates the algorithmic operation of devices in laboratory conditions. |
|
9 |
Research on Path Planning and Path Tracking Control of Autonomous Vehicles Based on Improved APF and SMC |
Yong Zhang, Feng Gao, Kangting Liu, and Fengkui Zhao |
APF method faces challenges like local minima and adaptability issues. Scholars enhance it with a minimum safe distance model for overtaking, minimizing route lengths. |
Attain a more streamlined, precise, and secure autonomous vehicle path planning system. This study presents an enhanced sliding mode controller incorporating error fusion derived from the mentioned SMC method. |
|
10 |
Personali zed Driving Styles in Safety- Critical Scenarios(S CS) for Autonomou s Vehicles: An Approach Using Driver-in- the-Loop (DIL)Simul ations. |
Ioana- Diana Buzdugan , Silviu Butnariu , Ioana- Alexandr a Ros,u, Andrei- Cristian Pridie and Csaba Antonya |
The challenge is to recognize individual driving styles and ensure that an autonomous vehicle adapts to them without compromising the safety and comfort of passengers. |
This method is about identifying personalize d driving styles in safety- critical scenarios through route simulations . |
|
11 |
Traffic Light Detection by Integrating Feature Fusion and Attention Mechanism |
Chi- Hung Chuang, Jung- Hua Lo Chun Chieh Lee and Kuo- Chin Fan |
Two-stage techniques were proposed in previous studies, where the traffic light area was first segmented or detected, and then additional recognition was done using the detected region. |
Traffic infractions like speeding, running red lights, parking in the incorrect place, failing to yield to pedestrians, wrong way, etc. |
|
12 |
Using a Monocular Camera for 360? Dynamic Object Instance(D OI) Segmentati on in Traffic |
Goran Oreski and Lucija Babi |
This work explores the potential applications of a front-facing monocular camera for training models that receive as input the entire view of the vehicle's surroundings as it appears in Figure 1 at inference time. |
The area under the precision- recall curve for each class is averaged to determine the mean average precision- recall (mAP). Better object detection system accuracy is indicated by a higher mAP score. |
|
13
|
Developme nt of an Autonomou s Driving Vehicle for Garbage Collection in Residential Areas |
Jeong- Won Pyo, Sang- Hyeon Bae, Sung- Hyeon Joo, Mun-Kyu Lee, Arpan Ghosh and Tae- Yong Kuc
|
To fully comprehend the surroundings surrounding the vehicle, a total of six cameras, four radars, one LiDAR, eight ultrasonic, and one real-time kinematic (RTK) sensor are positioned. |
It will be possible for us to specify the ODD for autonomous cars, configure all of the hardware and software to our specifications, and run tests
|
|
14
|
Analysis of Thermal Imaging Performa n ce under Extreme Foggy Condition: Applications to Autonomous Driving
|
Josué Manuel Rivera Velázque z,Guillau me Saint Pierre,Lo uahdi Khoudour ,Pierre Duthon , Frédéric Bernardin , Sébastie n Liandrat Sharon Fiss , Igor Ivanov a nd Raz Peleg |
Experiments within the Cerema PAVIN Fog and Rain platform were conducted to test the thermal imaging in front of foggy conditions.
|
We must examine how a group of thermal sensors perform when exposed to exceptionally foggy conditions. More precisely, we assess the thermal cameras in progressively heavier fog. |
|
15
|
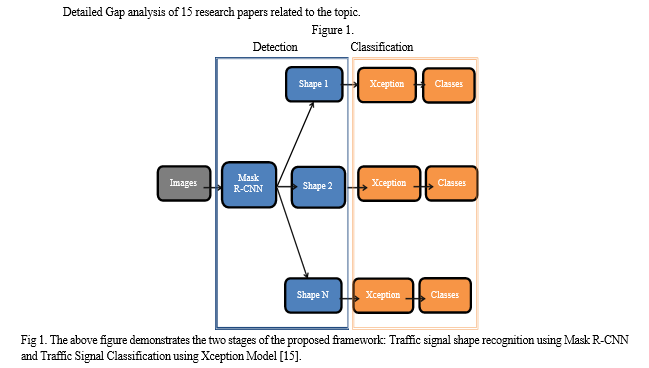
A Hierarchical Approach for Traffic Sign Recognitio n Based on Shape Detection and Image Classificat ion
|
Eric Hsueh- Chan Lu, Kuei-Hua Chang, Michal Gozdzikie wicz and Jing-Mei Ciou
|
Autonomous vehicle camera systems and Intelligent Speed Assistance (ISA) are the two primary uses of traffic sign recognition.
|
In this paper, we propose a hierarchical recognition method for Taiwan traffic signs based on image classification and object detection. of traffic signs is obtained in the second stage by utilizing the results.
|
III. METHODOLOGY
A. Autonomous Lane Change Model:
Utilizes Python Imaging library for image data collection. Implements one-hot vector for keyboard input.
Trains and tests in a virtual environment before real-life implementation.
Focuses on enabling autonomous left/right turns based on surrounding situations.
B. Collision Prevention with YOLO:
Implements YOLO algorithm for detecting abnormal road situations.
Uses AI CCTV to notify users within a 5 km radius within 5 seconds of detecting abnormalities.
Aims to prevent secondary accidents caused by vehicle-to- vehicle, vehicle-to-pedestrian, or vehicle-to-obstacle collisions.
C. Lateral Control with LCP:
Introduces a lateral control algorithm using the Linear Complementarity Problem (LCP).
Integrates an electric steering system for precise torque control and high accuracy.
Focuses on enhancing vehicle dynamics through advanced control methods.
D. HD Map Generation with Probabilistic Semantic Mapping:
Incorporates HD Map Generation for static components.
Utilizes Probabilistic Semantic Mapping, Semantic Segmentation, and Semantic Association.
Acknowledges potential limitations due to static components becoming outdated.
E. Enhancement through Deep Reinforcement Learning:
Aims to enhance autonomous driving using Deep Reinforcement Learning.
Agents learn by performing actions and receiving feedback (positive/negative) to improve behavior.
Applies the concept of rewarding desired behaviors and penalizing undesired ones.
F. SLAV-Sim: Autonomous Vehicle Simulator:
Presents SLAV-Sim, an autonomously learning vehicle simulator in Unity.
Utilizes Unity's ML Agents for computational efficiency and user-friendliness.
Allows users to create diverse road scenes and scenarios for testing autonomous vehicles.Efficient AP Selection in AGVs:
Proposes a technique for Access Point (AP) selection in
G. Autonomous Guided Vehicles (AGVs).
Anticipates future AP selections to minimize downtime.
Utilizes data on coordinates, movement directions, and signal strength for efficient AP selection.
H. Simulation Testing System:
Introduces a simulation testing system using hardware-in- the- loop simulation technology.
Integrates scenario simulation software with MATLAB for assessing algorithm performance.
Focuses on collaborative vehicle formation management scenarios.
I. Enhanced APF Algorithm:
Presents an enhanced Artificial Potential Field (APF) algorithm for autonomous vehicles.
Formulates repulsion fields to account for obstacles, road structure, and velocity.
Aims to streamline route planning and improve driving and parking smoothness.
J. Driver-in-the-Loop Simulation:
Examines driver behavior in safety-critical scenarios for autonomous vehicles.
Constructs a lifelike driving simulator on a Stewart platform.
Involves real-time simulation of an electric vehicle with user interaction using a steering wheel and pedals.
K. E-ELAN Feature Extraction:
Introduces E-ELAN, a feature extraction backbone based on CSPDarknet53 and transformer blocks.
Focuses on feature extraction in image tasks, maintaining small object details.
Utilizes a feature map pyramid and bi-fusion module for effective information processing.
L. Data Acquisition through CARLA Simulator:
Utilizes the CARLA simulator for data acquisition in autonomous driving research.
Employs front-, left-, right-, and rear-facing cameras for image capture.
Involves Mask R-CNN target creation through binary masks and class IDs for training instances.
M. Autonomous Car Steering:
Uses accelerator and brake pedals for vehicle speed adjustment.
Gathers driving data for training neural networks.
Inserts learned weight files and neural network descriptions for autonomous car steering in test mode.
N. Thermal Imaging Experiments:
Conducts experiments on a fog and rain platform to test thermal imaging in adverse conditions.
The platform includes control rooms, a tunnel, and a greenhouse for varied weather conditions.
Aims to replicate real-world or calibrated test settings using different scene components.
O. Traffic Sign Recognition:
Assembles a dataset of 11,074 photos of 23 traffic sign types in Taiwan.
Uses GoPro cameras and mobile phone cameras for image capture.
Involves manual identification and annotation using the VIA tool for Mask R-CNN preparation.
Prepares data for Xception for traffic sign recognition.
IV. FUTURE SCOPE
In the ever-evolving landscape of transportation, the future holds exciting prospects for vehicles within virtual environments and the realm of autonomy. Virtual environments are likely to play a crucial role in simulating and testing autonomous vehicles, providing a safe and controlled space for refining their capabilities. This virtual testing ground allows developers to expose vehicles to a myriad of scenarios, fine-tuning their responses to diverse and complex situations. Moreover, as technology advances, we can anticipate the integration of augmented reality (AR) and virtual reality (VR) into the driving experience, offering passengers an immersive and personalized journey. Autonomous vehicles, equipped with sophisticated sensors and AI algorithms, are set to revolutionize the way we move, enhancing safety, efficiency, and accessibility. The future envisions a transportation ecosystem where vehicles communicate seamlessly, navigate without human intervention, and contribute to a more sustainable and interconnected world. Developing a deep learning algorithm for autonomous vehicles using virtual environment data aims to predict and analyze vehicle movements under diverse weather conditions. The goal is to prevent secondary accidents, which contribute significantly to fatalities, by detecting abnormal situations and notifying nearby users. The focus extends to achieving precise torque control for autonomous driving and implementing an efficient algorithm for accurate map generation, incorporating real- time updates and considering different weather conditions.
In the realm of autonomous driving, reinforcement learning
(RL) becomes crucial, where actions and rewards guide the AI agent. Comparative analysis of RL algorithms, such as Proximal Policy Optimization (PPO) and Soft Actor-Critic (SAC), highlights their performance based on cumulative reward plots. The objective is to enhance the robustness of the algorithm under various operating conditions, including real- time weather fluctuations, thereby increasing the safety and reliability of autonomous driving.
The incorporation of camera systems has significantly advanced driver assistance systems, contributing to safer driving. Overcoming outlined constraints involves establishing a broader definition of Operational Design Domain (ODD) and leveraging Simultaneous Localization and Mapping (SLAM) technology for more precise autonomous driving, even with High-Definition (HD) maps. Options include enhancing the YOLO model with thermal images or utilizing ADASKY's proprietary software for hardware and software testing in challenging conditions, such as fog.
To further improve the proposed solution, there is a need to focus on making the model faster and less hardware- dependent. Additionally, expanding the recognition capabilities to include various traffic sign classes, numbers, Chinese characters, and composite signs can enhance the versatility and effectiveness of the autonomous driving system.
Conclusion
In conclusion, the advent of self-driving cars represents a transformative milestone in the evolution of transportation technology. This comprehensive paper has delved into various aspects of self-driving cars, encompassing the technology, benefits, challenges, and future implications of these autonomous vehicles. Self-driving cars hold immense promise in enhancing road safety, reducing traffic congestion, and providing mobility s solutions to individuals who may otherwise face limitations in traditional transportation. The technological advancements in sensor technology, artificial intelligence, and machine learning have propelled self-driving cars to the brink of widespread adoption. However, it is crucial to acknowledge that the deployment of self-driving cars is not without its challenges. Ethical dilemmas, legal frameworks, cyber security concerns, and public acceptance are just a few of the hurdles that must be surmounted. Additionally, the impact on employment in the transportation sector and potential changes in urban infrastructure must be addressed as self-driving cars become more prevalent. The realization of a world where self-driving cars coexist with traditional vehicles is on the horizon. Through continued research, investment, and collaboration, we can unlock the full potential of self- driving cars to create safer, more efficient, and environmentally sustainable transportation systems. Self- driving cars are poised to revolutionize the way we navigate the world, offering the promise of a future where mobility is not just convenient but also transformative for individuals and society as a whole.
References
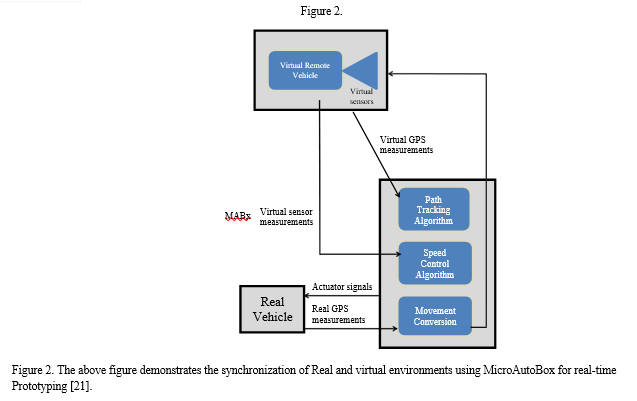
Guvenc, B.A.; Guvenc, L.; Ozturk, E.S.; Yigit, T. Model Regulator Based Individual Wheel Braking Control. In Proceedings of the 2003 IEEE Conference on Control Applications, CCA 2003, Istanbul, Turkey, 25 June 2003;Volume 1, pp. 31–36. [2] .Lenzo, B.; Zanchetta, M.; Sorniotti, A.; Gruber, P.; De Nijs, W. Yaw Rate and Sideslip Angle Control Through Single Input Single Output Direct Yaw Moment C Control. IEEE Trans. Control Syst. Technol. 2021, 29, 11124–139. [3] .Bengler, K.; Dietmayer, K.; Farber, B.; Maurer, M.; Sti ller, C.; Winner, H. Three Decades of Driver Assistance Systems: Review and Future Perspectives. IEEE Intell. Transp. Syst. Mag. 2014, 6, 6–22. [4] Wang, H.; Tota, A.; Aksun-Guvenc, B.; Guvenc, L. Real Time Implementation of Socially Acceptable Collision Avoidance of a Low Speed Autonomous Shuttle Using the Elastic Band Method. Mechatronics 2018, 50, 341–355 [5] Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A Survey of Autonomous Driving: Common Practices and Emerging Technologies. IEEE Access 2020, 8, 58443– 58469 [6] Gelbal, S.Y.; Cantas, M.R.; Guvenc, B.A.; Guvenc, L.; Surnilla, G.; Zhang, H. Mobile Safety Application for Pedestrians Utilizing P2V Communication over Bluetooth;SAE International: Warrendale, PA, USA, 2022 [7] Juntae. Kim, Geun Young Lim, Bokyeong Kim, Youngi Kim, Changseok Bae.Deep Learning(DL) Algorithm using Virtual Environment Data for Self Driving Cars. [8] Chaeyoung Lee, Hyomin Kim, Sejong Oh, Illchul Doo. A study on building a ‘Real-Time Vehicle Accident and Road Obstacle Notification Model’ using AI CCTV. [9] Ning Ye, Duo Wang, Yong Dai. Enhancing Autonomous Vehicle Lateral Control: A Linear Complementarity Model-Predictive Control Approach [10] Hengyuan Zhang, David Paz , Qinru Li ,Shashank Venkatramani, Hao Xiang and Henrik I. Christensen. Probabilistic Semantic Mapping for Autonomous Driving in Urban Environments [11] Akshaj Tammewa , Nikita Chaudhari, Bunny Saini , Divya Venkatesh, Ganpathiraju Dharahas , Deepali Vora , Shruti Patil, Ketan Kotecha and Sultan Alfarhood. Improving the Performance of Autonomous Driving through Deep Reinforcement Learning. [12] Fumiko Ohori, Hiro zumi Yamaguchi, Takeshi Matsumura and Satoko Itaya. SLAV-Sim: A Framework for Self-Learning Autonomous Vehicle Simulation. [13] Zhijing Xu, Pengren Ding, Yuqiong Zhang, and Fangze Tu. Design of a Collaborative Vehicle Formation Control Simulation Test System. [14] Yong Zhang, Feng Gao, Kangting Liu, and Fengkui Zhao. Research on Path Planning and Path Tracking Control of Autonomous Vehicles Based on Improved APF and SM. [15] Ioana-Diana Buzdugan , Silviu Butnariu, Ioana-Alexandra Ros,u, Andrei-Cristian Pridie and Csaba Antonya. Personalized Driving Styles in Safety-Critical Scenarios(SCS) for Autonomous Vehicles: An Approach Using Driver-in-the- Loop (DIL)Simulations. [16] Chi-Hung Chuang, Jung-Hua Lo Chun Chieh Lee and Kuo-Chin Fan. Traffic Light Detection by Integrating Feature Fusion and Attention Mechanism. [17] Goran Oreski and Lucija Babi. Using a Monocular Camera for 360? Dynamic Object Instance(DOI) Segmentation in Traffic. [18] Jeong-Won Pyo, Sang-Hyeon Bae, Sung-Hyeon Joo, Mun-Kyu Lee, Arpan Ghosh and Tae-Yong Kuc. Development of an Autonomous Driving Vehicle for Garbage Collection in Residential Areas [19] Josué Manuel Rivera Velázquez, Guillaume Saint Pierre, Louahdi Khoudour, Pierre Duthon , Frédéric Bernardin,Sébastien Liandrat Sharon Fiss , Igor Ivanov and Raz Peleg.Analysis of Thermal Imaging Performance under Extreme Foggy Conditions: Applications to Autonomous Driving. [20] Eric Hsueh-Chan Lu, Kuei-Hua Chang, Michal Gozdzikiewicz and Jing-Mei Ciou. A Hierarchical Approach for Traffic Sign Recognition Based on Shape Detection and Image Classification. [21] Xincheng Cao, Haochong Chen, Sukru Yaren Gelbal, Bilin Aksun-Guvenc and Levent Guvenc. Vehicle-in-Virtual-Environment (VVE) Method for Autonomous Driving System Development, Evaluation and Demonstration.
Copyright
Copyright © 2024 Raj Awate, Amartya Pardeshi, Baljeet Singh, Pritesh Malpani, Dr. Prajakta Khadkikar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61360
Publish Date : 2024-04-30
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online