

Ijraset Journal For Research in Applied Science and Engineering Technology
Connected Robotics for Intelligent Surveillance: An IOT Approach
Authors: Dr. Mrs. Jyotsna Gawai, Kalyani Lakhade, Ruchika Patil, Ritik Meshram
DOI Link: https://doi.org/10.22214/ijraset.2024.59311
Certificate: View Certificate
Abstract
The robot employs the HTTP Communication protocol, enabling users to access live video streaming from the OV2640 camera through a standard web browser. The web interface includes intuitive directional buttons for seamless control, allowing users to command the robot to move left, right, forward, and backward. The locomotion of the robot is achieved through two DC motors integrated with a Robot chassis and an L293D motor driver module. This paper presents the development and implementation of an innovative IoT-based Surveillance Robot designed for remote control, utilizing a Wi-Fi module and a smartphone interface. The portable espionage robot integrates cutting-edge technology, featuring an AI Thinker ESP32-CAM module with an ESP32-S processor, an OV2640 camera, motor drivers, and a robust chassis with two moving wheels. The ESP32-CAM allows the capture and storage of images on a microSD card, facilitating efficient data management. The real-time video feed is transmitted wirelessly to the user\'s smartphone over a Wi-Fi infrastructure, providing a live-streaming experience. This wireless surveillance robot finds applications in various scenarios such as war fields, disaster management, and beyond, showcasing its versatility in remote monitoring and reconnaissance tasks.
Introduction
I. INTRODUCTION
Given the complexity of geology, non-continuities, andtheir impact on stress distribution, underground mines are more accident-prone. The proposed robotic system aims to mitigate unexpected accidents and existing dangers, providing a safer working environment for miners and reducing life and financial threats. This paper highlights the crucial factors influencing safety in underground mines, such as area constraints, environmental pollutants, geology complexities, and inadequate lighting. Additionally, it introduces a wirelessly operated surveillance robot, equipped with a camera, motor drivers, and IoT capabilities, designed for espionage purposes.
In the mining industry, the safety of workers is a paramount concern due to the direct engagement of a significant workforce, high investment and operational costs, uncertainty in mining units, and the inherent dangers of mining operations. While open-pit mines benefit from better safety conditions with ample light and fresh air, underground mines pose heightened risks, necessitating synchronous monitoring and alarm systems.
Analyzing accidents in Iranian underground mines reveals that fatalities often result from harmful gas leakage, falling objects, and inadequate use of safety gear such as helmets. To address these challenges, this paper proposes an innovative solution – an IoT and vision-based robot designed to measure harmful gases, monitor temperature and humidity, and detect altitude and atmospheric pressure. The system wirelessly transmits evaluated data to a developed software interface hosted on Thingspeak server.
II. INFO OF DC – MOTOR
An electric motor is an electrical machine that converts electrical energy into mechanical energy. Most electric motors operate through the interaction between the motor's magnetic field and electric current in a wire winding to generate force in the form of rotation of a shaft. Electric motors can be powered by direct current (DC) sources, such as from batteries, motor vehicles or rectifiers, or by alternating current (AC) sources, such as a power grid, inverters or electrical generators. An electric generator is mechanically identical to an electric motor, but operates in the reverse direction, converting mechanical energy into electrical energy. We are using 30 RPM DC geared motor
A. Features of DC MOTOR
- Inexpensive: DC motors are relatively inexpensive, making them a great option for budget-minded hobbyists.
- Versatile: DC motors can be used to power a variety of robot components, including wheels, actuators, and sensors.
- Easy to Find: DC motors are widely available, so you should be able to find one at your local hobby store or online.
- Easy to use: DC motors are relatively easy to use, even for beginners. They can be controlled using a variety of methods, including simple switches, potentiometers, and servo controllers.
If you are looking for a reliable and affordable motor for your next mobile robot project, a DC motor is a great option.
III. BRIEF OF ESP32-CAM
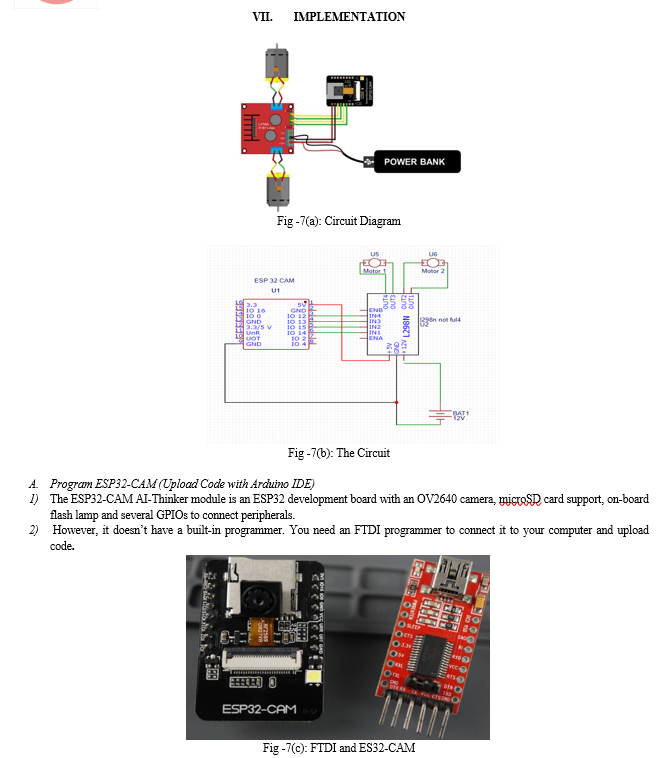
The ESP32-CAM is a compact and cost-effective development board/module that combines the power of the ESP32 microcontroller with an integrated 2MP camera. Developed by Espressif Systems, this versatile module is designed for applications ranging from IoT projects to surveillance systems [1].
A. Advantages of ESP32-CAM
- Affordability: Cost-effective, making it accessible for budget-conscious projects.
- Compact Size: Small form factor for easy integration into various projects.
- Integrated Camera: Onboard 2MP camera allows for image and video capture.
- Connectivity: Built-in Wi-Fi and Bluetooth enable seamless communication with other devices and networks.
- Community Support: Active community of developers, providing resources, tutorials, and support.
B. Applications of the ESP32-CAM
- Home Security: The ESP32-CAM can be used to create a home security system that can detect motion and send alerts to your phone.
- Pet monitoring: The ESP32-CAM can be used to monitor your pet's activity and send alerts if they leave a specific area.
- Weather Station: The ESP32-CAM can be used to collect weather data, such as temperature, humidity, and air pressure.
- Plant Watering System: The ESP32-CAM can be used to automatically water your plants based on the weather conditions.
- IoT Sensor Network: The ESP32-CAM can be used to create a network of sensors that can collect data about the environment.
IV. INFO OF LITHIUM BATTERY
Lithium-ion batteries are another popular type of batteries that are used in the Uninterruptible Power Supply (UPS) designs. These batteries are commonly used in portable electronic devices. These are low maintenance batteries having high energy density, small size and light weight which makes them suitable for use in most of the portable devices. But, due to high energy density in comparison to the weight and volume of the Li-ion Battery, there are also some safety concerns while charging the Li-ion batteries. Before designing a charger circuit for these batteries, let us first understand charging methods and topologies involved in charging Li-ion batteries. Also, precautions required in handling, storing and disposing of these batteries are must to know.
A. Charging of Li-ion Batteries
There are different charging methods for charging any battery –
- Constant voltage charging (abbreviated as CV charging )
- Constant current charging (abbreviated as CC charging )
- Constant current-Constant voltage charging (CC-CV Charging)
B. Charging Topologies for Li-ion Batteries
- Switching Regulators
The Switching Regulators step-up and step-down the input supply voltage to the desired voltage level. The switching regulators (like transistors) continuously switches between their ON and OFF state. So they spend quite less time in high dissipation state which reduces power dissipation of the system. This improves the efficiency of the switching regulator as compared to a linear regulator. Therefore, designing the charger by this topology increases the system efficiency. But this topology requires comparatively costlier electronic components as well as have a complex circuitry involved in the system design.
2. Linear Regulator
A Linear regulator is used for maintaining a constant voltage at the output. The regulator act like a variable resistor which maintains the steady voltage at the output by continuously dissipating the heat. This decreases the overall efficiency of the system. So in this topology, a linear regulator is used for charging the battery. The efficiency of this charger is comparatively less but it is simple to design and have low cost
V. PROPOSED METHODOLOGY
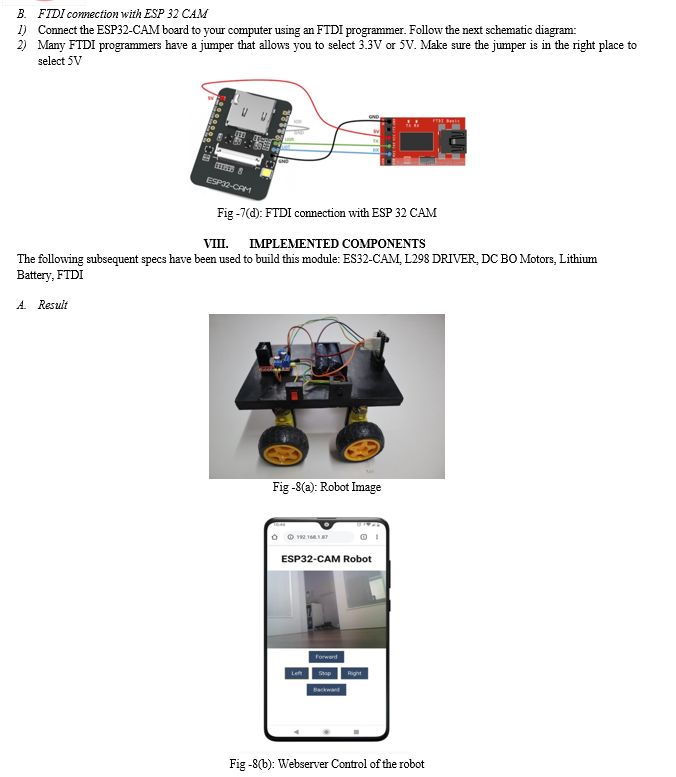
We use in our project the system with the sensors on the robot with a camera. For this ESP32 cam is used which is connected to the WiFI network so we can access the robot online. And when we put the ip address on the browser we can see the camera vision which is live and having the control buttons on the same page. By that we can control the motion of the robot. And as well as the data from the sensors are transferred to the Thingspeak server and we can see the graph.
Block diagram shows the parts we are using in this project.

VI. LITRATURE REVIEW
[1] Integrated iot based design and android operated multi purpose field surveillance robot for military use, 1 m.ashokkumar, 2dr.t.thirumurugan department of electronics and communication engineering christ institute of technology pondicherry, india, multi-purpose field surveillance robot has been successfully designed, constructed and integration tested using the best available resources. This multipurpose robot can be deployed in war fields for military use. The robots successfully detect metal and toxic gases so the robot instead of humans can be put to detect a dangerous item. Our robot prototype employs wi-fi technology hence it has wide range of operation and can cover better distance.
[2] Design and fabrication of surveillance robot using Rocker bogie mechanism tejas bamne*1, siddhi jadhav*2, shrutika borkar*3, shailesh kokare*4, mr. Pravin alone*5, international research journal of modernization in engineering technology and science, this project climbs the obstacles or ride on the abnormal surface with the help of such a rocker -bogie mechanism serves our objective because of its nature of allowing flexibility in linkages when wheel climb or goes from the abnormal road surface. Hence this mechanism does not need an extra suspension arrangement. Also, the wireless wi-fi mini camera which is connected to the free mini camera app configured. The avrecording of the camera can be seen in that app. The camera also has motion detection and night vision. Also, this project is budget-friendly.
[3] Portable surveillance robot using iot , k. Rajkumar1, c. Saravana kumar2, c. Yuvashree3, mr. Senthil murugan in our project, the robot is designed to move by our command and also by its own according to the command given by the program It leads easy process without interaction of humans. This project is very much useful in the places where a human cannot go into the places like canals, smoke-oriented caves and it will be very much useful in such situations. [4] Internet of robotics things in smart domain : Applications and challenges, laura romeo , antonio petitti , roberto marani and annalisa milella, this survey has been mainly focused on those ior t-based systems within the industrial and production fields. Iort issues and challenges have been deeply analyzed, showing the increasing need .
 ???????
???????
Conclusion
We can control the robot with the help of laptop/mobile manually. Automatic monitoring can also be done. Our proposed robot is small in size thus manoeuvrings into area where human access is impossible. Wireless technology is one of the most integral technologies in the electronics field. This technology is used to serve our project as supreme part of surveillance act. This provides highly efficient and cost-effective robot that replaces human work and reduces human labour and performing monitoring works in a well effective manner. This system displays the evaluated data on a developed software through wireless data transmission hardware on Things peak server. Regarding the complexity of geology, the structure of present non-continuities, and their direct influence on the type of stress distribution, the underground mines are more accident-prone. Unexpected accidents and existing dangers in underground mines could provide a stressful and dangerous workplace for workers and operational facilities that impose considerable life and financial threats. It is a very affordable surveillance system which consumes small space for operation. It overcomes the problem of limited range surveillance by using the concept of IOT. We can control the robot with the help of laptop/mobile manually. Automatic monitoring can also be done. Our proposed robot is small in size thus maneuvering into area where human access is impossible. Wireless technology is one of the most integral technologies in the electronics field. This technology is used to serve our project as a supreme part of surveillance act. This provides highly efficient and a cost effective robot that replaces human work and reduces human labor and performing monitoring works in a well effective manner. A. Future Scope 1) IoT based Surveillance Robot can be used for disaster management sites. 2) IoT based Surveillance Robot can be used on uneven terrain. 3) IoT based Surveillance Robot can be used for archaeologist sites for survey. 4) ESP 32 CAM can be mounted on various kinds of robot body for customized applications.
References
[1] Prof. Yayati shinde, Shantanu chandane, akash mandave, shweta nehete, Prerna vishe, International research journal may-2021. The seed sowing machine is a key component of agriculture field. high precision pneumatic planters have been developed for many verities of crops, for a wide range of seed sizes, resulting to uniform seeds distribution along the travel path , in seed spacing. [2] Ammar A.M. AI- Talib , Yap Chee Xiam, Aim Atiqa, Nor Fazilah Abdullah, UCSI University, 56000 Kuala Lampur, Malaysiya , 9 Feb 2023. determined the effects of different seeding technique and machines and also different rates of oilseed rape application on seeding emergence plant establishment and final grain yield. [3] Jeonghyeon Pak, Jeongeun Kim, Yonghyun Park, Hyoung IL Son (Senior Member, IEEE) 7 May 2022. concludes that bullock drawn planters are becoming necessity for sowing as the skilled workers for sowing are almost diminishing. Planting distance and plant population are crucial factors in maximizing the yields of crops. [4] Ghalib Ahmed Tahir, Chu Kiong Loo (Senior member ,IEEE) 20 March 2020. another agricultural researcher determined the effects of different seeding technique and machines and also different rates of oilseed rape application on seeding emergence plant establishment and final grain yield [5] Ayan Dutta, Swapnoneel Roy, O. Parrick Kreidl, Ladislau Boloni, 13 Dec 2021. [6] R. Joshua, V. Vasu and P. Vincent “Solar Sprayer - An Agriculture Implement”, “International Journal of Sustainable Agriculture” 2 (1): 16-19, 2010 ISSN 2079- 2107 [7] Mahesh. R. Pundkar and A. K.Mahd - Sowing Machine: Review International Journal of Engineering and Social SciencVolume3,Issue3, Pp-68-74. [8] Laukik P. Raut, Smit B. Jaiswal and Nitin Y. Mohite, Design, development, and fabrication of agricultural pesticides. With weeder, International Journal of Applied Research and Studies, 2013. [9] Ramesh and H. P. Girish Kumar, Agriculture Seed Sowing Equipment: A Review, International Journal of Science, Engineering and Technology Research, 2014, Volume 3, Issue 7, Pp-1987-1992 [10] Pranil V. Sawalakhe, Amit Wandhare, Ashish Sontakke, Bhushan Patil, Rakesh Bawanwade and Saurabh Kurjekar, Solar Powered Seed Sowing Machine, Global Journal of Advanced Research, Vol-2, Issue4, Pp-712-717 [11] Sridhar H .S Development of Single Wheel Multi-Use Manually Operated Weed Remover, International Journal of Modern Engineering Research, 2013.
Copyright
Copyright © 2024 Dr. Mrs. Jyotsna Gawai, Kalyani Lakhade, Ruchika Patil, Ritik Meshram. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET59311
Publish Date : 2024-03-22
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online