

Ijraset Journal For Research in Applied Science and Engineering Technology
Controlling of Induction Motor
Authors: Hima Bindhu, Srikanth , Manohar , Sai Nikhil, Mr. CH. Shravan Kumar Reddy
DOI Link: https://doi.org/10.22214/ijraset.2024.58780
Certificate: View Certificate
Abstract
This paper describes how to use an Arduino Uno to regulate the speed of an induction motor and create an energy-efficient, smooth control system. Due to their affordability and adaptability, induction motors are frequently utilized in industrial drives; nevertheless, the range of speed control available with stator control is limited. Controlling the firing angle and utilizing power electrical gadgets can help fix this issue. The goal is to use stator control to regulate the induction motor\'s speed. This hardware provides a signal to the microprocessor, which manages the power supply to the electronic devices. Through the use of an Arduino Uno to adjust the firing angle of a semiconductor power device, the motor\'s stator winding\'s terminal voltage can be controlled.
Introduction
I. INTRODUCTION
A lot of motors are employed in everyday life. An electric motor is now a required power source in many commercial and residential settings. It ranges from thousands of horsepower to fractional horsepower. There is a broad range of functions and performance requirements for these motors. The induction motor's speed is adjusted by an external resistor or DC voltage when speed variation is required. To give appropriate speed fluctuations beyond energy conservation, and to prevent the induction motor from squandering slip power through the use of a slip recovery scheme. A mix of PC hardware, programming, and mechanical components with real-time computing limitations is called an embedded system. It is intended to carry out several functions, such as accessing and managing data in a variety of electronics-based systems, electrical and electronic circuits, and kits that use embedded technology.
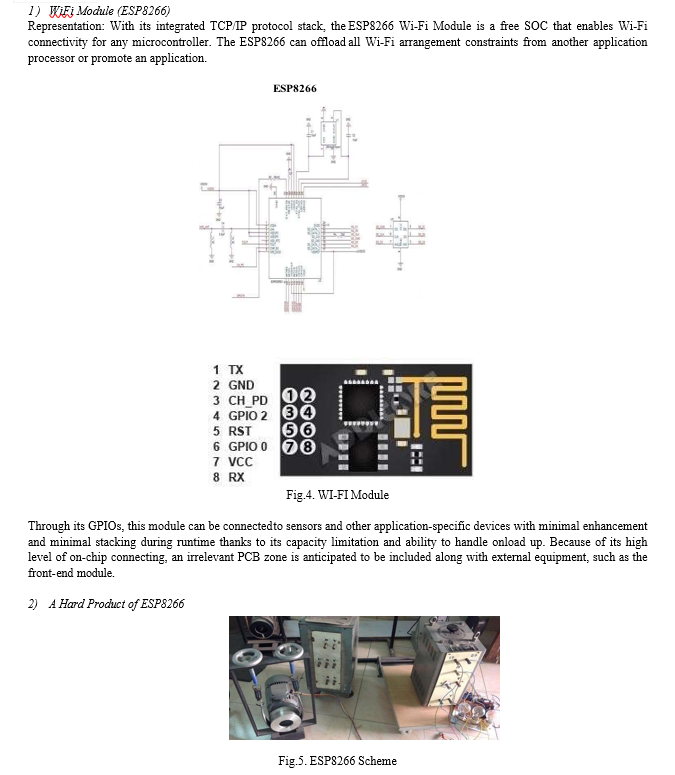
Utilization of ESP8266
Smart power plugs Home automation Mesh network Industrial wireless control, Wearable gadgets Wi-Fi location-aware gadgets Security ID labels Wi-Fi position system beacons. ESP8266 module as follows
- Vcc = 3.3V (needs around 300-400mA peak)
- Gnd = - ve ground
- CH_PD = Chip enable so always +ve
- RST = ground to reset
- GPIO0 = normally floating; however, this should be grounded when you start the update.
- GPIO2 = abnormal state
- UTXD = Tx information associate with RX on FTDI/Serial interface
- URXD = Rx information associate with TX of FTDI/Serial interface
3) Electronic Characteristics
Current Consumption: The going with current usage relies upon 3.3V supply, and 25? surrounding, using inward controllers. Estimations are done at radio wire port without SAW channel. All the transmitter's estimations rely upon 90% commitment cycle, persistent transmit mode.
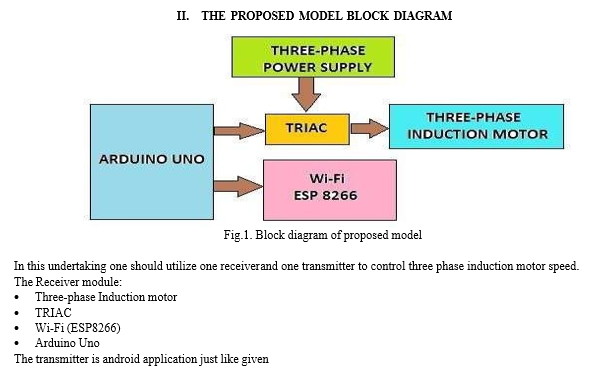
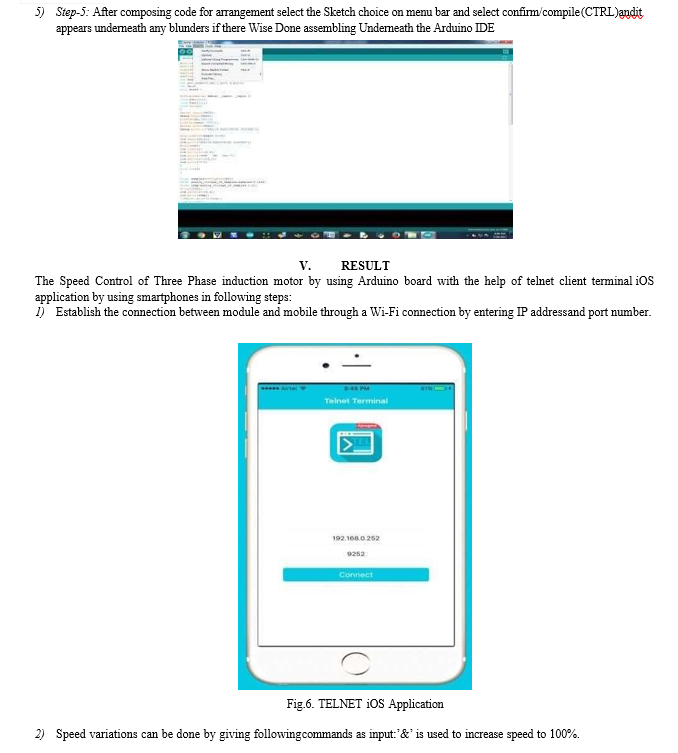
4) Three Phase Induction Motor
A Three-Phase Induction motor is basically a consistent speed motor which makes it difficult to control its speed. The speed control of induction motor is achieved by reducing the efficiency and low power factor. Interface section includes step-up transformer and motor, AC is fed to step-up transformer which converts 12 Volts to 220 Volts which drives motor. Generate two pulses at 5 and 6 pins of Arduino and send these two pulses to the input. The change in delay between the pulses is in user’s hand.
Synchronous Speed
N= 120F/P
Where, f = recurrence and P is the quantity of shafts The speed of acceptance engine is given by,
N= NS (1-S)
Where, N is the speed of the rotor of an acceptance engine, Ns is the synchronous speed, S is the slip. The torque created by three phase induction motor is given by, T=
(3/2PI NS)
X (SE2R2/R2+ (SX2))
The Speed of Induction Motor is changed from both Stator and Rotor Side. The speed control of three phase induction motor from stator side is as follows:
-
- V/f control or recurrence control.
- Changing the quantity of stator posts.
- Controlling supply voltage.
- Adding rheostat in the stator circuit.
The speed controls of three phase induction motor from rotor side are additionally named:
-
- Adding outer protection on rotor side.
- Cascade control technique.
- Injecting slip recurrence emf into rotor side.

Conclusion
Three-Phase Induction motor gives an essential and minimal effort alternative for speed control, and the start of Three-Phase Induction motor acknowledgement. It can provide efficient speed control in emergency cases. Huma effort can be reduced. Acknowledgement motors are incredible machines for application requiring extensive speed control. The ordinary working extent of a regular selection motor is bound to less than 5% slip, so the prerequisite for different speed controls rises. Torque-Speed attributes for different procedures for speed control of a Three-Phase Induction motor can be achieved and inspected by making MATLAB codes. In factor rotor protection, the most extraordinary electromagnetic torque is self- sufficient of rotor protection, thusly, when the rotor security is extended, the best electromagnetic torque is unaffected yet the speed at which it happens can be particularly controlled. In factor stator protection, increase in a repeat grow the torque-speed relation a decrease in repeat reduces the torque-speed relation of the motor, in factor stator voltage, fluctuating the terminal voltage will change the working speed yet with additionally a variety of working torque. To the extent as far as extension of speed variations, it is not critical therefore this strategy is suitable for small motors. In steady volts/hertz control, the supply voltage and the supply repeat can be changed with the ultimate goal that the proportion remains consistent the transition stays steady as well. In this way, special working zones for different paces and torques can be obtained and further varied synchronous speed can be obtained with relatively same significant torque, in this way the motor is completely utilized, likewise, there is a better way than the average extent of speed control. To achieve higher speed and torque, a lesser number of shafts is required and to achieve lower speed and torque, the number of shafts should be extended, Finally, it is prescribed that any of the speed control procedure be completed in a model. Energy can be saved and reduce energy crisis in the country.
References
[1] Maiti, S. (2008). Model Reference Adaptive Controller Based Rotor Resistance and Speed Estimation Techniques for Vector Induction Motor Drive Utilizing Reactive Power, IEEE Trans on Industry Electronics Vol. 55, pp. 594601. [2] Sen, P.C. (1990). Electric Motor Drives and Control Past, Present and Future, IEEE transactions on Industrial Electronics, vol. 37, no. 6, pp. 562-575. [3] Bose, B. K. (2002). Present day Power Electronics and AC Drivers, Prentice Hall. [4] Ho, E.Y.Y. and Sen, P.C. (1988). Decoupling Control of Induction Motor Driver, IEEE Transactions on Industrial Electronics, vol. 35, no. 2, pp. 253-262. [5] Santisteban, J. A. and Stephan, R.M., Vector Control Methods for Induction Machines: An Overview, IEEE Transactions on Education, vol. 44, no. 2. [6] Novotny, D.W. and Lorenz, R.D. (1986). Prologue to Field Orientation and High- performance AC Drives, IEEE Tutorial Course Notes [7] Blaschke, F. (1971). A New Method for the Structural Decoupling of AC Induction Machines, Conf. Rec. IFAC. [8] Yoo, B. and Ham, W. (1998). Versatile fluffy sliding mode control of nonlinear framework, IEEE Transactions on Fuzzy Systems, vol. 6, no. 2, pp. 315-321. [9] Xia, Y. and Jia, Y. (2003). Powerful sliding mode control for questionable time-postpone frameworks: a LMI approach, IEEE Transactions on Automatic Control, vol. 48, no. 6, pp. 1086. [10] Utkin, V. I. (1978). Sliding Modes and their Application in Variable Structure Systems, MIR Publishers. [11] Yildiz, C. (2008). Vector Control of AC Induction Machine Using Genetic Algorithm Based Fuzzy Controller, Department of Electrical and Electronics Engineering, K. Maras Sutcuimam University, K. Maras. [12] Mansfield, R.A. (1990). Hereditary Algorithms. [13] Goldberg, D.E. (1989). Hereditary Algorithms in Search Optimization and Machine Learning, Addition Wesley Pub. Co. [14] Gotshall, S. and Rylander, B. (2000). Ideal Population Size and The Genetic Algorithm, Proc on Genetic and Evolutionary Computation Conference. [15] Goldberg, D.E. (1989). Hereditary Algorithms in Search Optimization and Machine Learning, Addison Wesley. [16] Bose, B. K. (1997). Elite Control and Estimation in AC Drives, IECON 97 23rd International Conferences on Industrial Electronics Control and Instrumentation, vol. 2, pp. 377-385. [17] Harnefors, L. (2001). Plan and Analysis of General Rotor Flux Oriented Vector Control Systems, IEEE Transactions on Industrial Electronics, vol. 48, no. 2. [18] Sekkeli, M. Yildiz, C. and Ozcalik, H.R. (2009). Fuzzy Logic Based Intelligent Speed Control of Induction Motor Using Experimental Approach, International Symposium on innovations in intelligent systems and applications, June 29-July 1st. [19] Trzynadlowski, A. M. (2001). Control of Induction Motors, Academic Press. [20] Zadeh, L.A. (1965). Fluffy Sets. In format and Control, vol. 8, pp. 338-353. [21] Lin, C. T. and Lee, C. S. (1996). Neural Fuzzy Systems, Prentice Hall PTR. [22] Ross, T. J. (1995). Fluffy Logic with Engineering Applications, McGraw-Hill Inc. [23] Babuska, R. (1998). Fluffy Modelling for Control, Kluwer Academic Publishers. [24] Dubois, D. Lang, J. and Prade, H. (1991). Fluffy Sets in surmised Reasoning Part II: Logical Approaches, Fuzzy Sets and Syst., vol. 40, no. 1, pp. 203-244.
Copyright
Copyright © 2024 Hima Bindhu, Srikanth , Manohar , Sai Nikhil, Mr. CH. Shravan Kumar Reddy. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET58780
Publish Date : 2024-03-05
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online