

Ijraset Journal For Research in Applied Science and Engineering Technology
Creating a Multi-Purpose Floor Cleaning Robot
Authors: Dr. P. D. Khandait, Tejas N. Bhende, Komal R. Kalambe, Komal C. Dubey
DOI Link: https://doi.org/10.22214/ijraset.2024.59456
Certificate: View Certificate
Abstract
Traditional floor cleaners which rely on electricity; find widespread use in areas such as airports, railway platforms, hospitals, bus shelters, shopping malls, and various commercial spaces. These devices rely on electricity for operation, posing limitations on their usage. In regions like India, where power crises are prevalent, especially during summer, the effectiveness of floor cleaners is significantly hindered, particularly in bus stands. Therefore, there arises a need to develop an affordable and user-friendly battery-operated floor cleaner. This paper tries to create a multifunctional floor cleaning machine as an alternative to conventional electric models. The work includes modeling and analyzing the floor cleaner using relevant software.
Introduction
I. INTRODUCTION
Cleaning and disinfecting are really important for keeping people healthy. They also help stop bugs by getting rid of things that attract them. This makes surfaces like floors and walls stronger when they're cleaned regularly. With more people using buses and trains, the places where you wait for them can get dirty quickly. That's why bus stops and train stations need to be cleaned often. But there isn't just one way to clean everything. It depends on what tools and technology you use, and they should be easy for people to use.
Lately, robots that clean floors have become popular, especially in places where there aren't enough people to do the work. But in India, where many people don't have jobs, it's better to make cleaning machines that don't need as much work. That's why this paper deals with making a battery-operated manual floor washing machine. We want to design, create, and test this machine to make sure it works well and is easy for people to use. This way, we can help keep public places clean without needing lots of workers.
Regular floor cleaners are used a lot in places like airports, railway stations, and malls because they're important for keeping things clean and meeting government rules.
But they need electricity to work, which can be a problem in places like India where there are often power shortages, especially in summer. That's why we're working on making a floor cleaner that doesn't need electricity but a battery. We want it to clean both wet and dry messes in one go, be cheap to use, and not need much maintenance. We're using special computer programs to help design it.
II. PROBLEM IDENTIFICATION
The cleaning machine serves a crucial purpose in maintaining cleanliness across diverse environments such as hospitals, houses, auditoriums, bus seats, and public places. In today's society, both indoor and outdoor cleaning has gained significant importance, playing a pivotal role in our daily lives.
Effective waste removal is essential for our health, reducing the burden of labour. While there are numerous floor scrubbers available, the machine developed in this project stands out due to its simple construction and user-friendly design, making it accessible to anyone without the need for specialized training. This simplicity makes it particularly useful in large spaces and hospitals, significantly reducing cleaning time and associated costs.
In the contemporary era, cleaning is a fundamental necessity, and various techniques are regularly employed to clean surfaces in institutions like colleges and hospitals. The motivations for cleaning floors are multifaceted, including preventing accidents caused by slipping, enhancing floor aesthetics, removing debris and obstructions, eliminating allergens and dust, avoiding surface wear, renovating environments (such as kitchens), and maintaining an optimal grip to prevent slipping. In our project, we prioritized simplicity and cost-effectiveness by developing a mechanically operated machine with minimal electrical components. This approach ensures that the floor cleaner has a straightforward structure, making it safe and easy to use for anyone without prior training.

IV. ADVANTAGES
- The floor cleaning machine uses electricity to clean surfaces, making it easier than doing it by hand.
- It has motorized brushes and a mop, so it cleans faster and better.
- It can clean and polish at the same time using the mop, getting rid of dirt and making the floor shiny.
- It uses a special type of motor that doesn't need a lot of power.
- It doesn't cost much to keep this machine working well.
- You can easily control how much cleaning solution it uses with a valve on the machine.
- It can clean different kinds of surfaces, not just rough ones.
- You can make it even better by adding features like automatic movement.
V. APPLICATIONS
- Hospitals: Machines clean floors both dry and wet to keep them clean and germ-free.
- Computer Centers: Machines maintain a shiny surface by cleaning it regularly.
- Colleges: Machines help get rid of dust buildup on surfaces around the campus.
- Train Stations: Platforms at train stations are kept clean throughout the year.
- Malls & Auditoriums: These places use cleaning machines to keep their floors tidy.
- Theaters: Machines are used to clean floors before and after shows for a clean environment.
VI. CALCULATION
A. Consider, Room dimensions are
Length of room (Assumption) = 5.8 m (L)
Breadth of room (Assumption) = 5.5 m (B)
B. Calculating the Speed of Robot
Number of drive motors = 2
Radius of drive wheel (R) = 0.057 m
RPM of each drive motor (N) = 60 RPM
Width of the robot (W) = 0.34 m
Speed (V) = R*ω
ω = (2*π*N)/60
ω = 6.28318 ≈ 6.28 radians/second
V = 0.35 m/s
Considering efficiency of power delivered to motor = 91%
Speed delivered or Speed of Robot (Vr) = V*0.91 = 0.3185 m/s
Time taken by the robot to cover the room length once (t) = L / Vr = 5.8/0.3185 = 18.473 seconds
Number of passes required for robot to cover the entire room = Breadth of the room (B) / Width of the robot (W) = 5.5/0.34 = 16.17 passes ≈ 16 passes
Total time taken by the robot to cover the entire room = 16*18.473 = 295.568 seconds ≈ 4.92 minutes ≈ 4 minutes 92 seconds (Max).
C. Calculating Distance that can be Cleaned with Fully Charged Batteries Considering
Maximum load condition on motors, current drawn by each motor = 1000 mA = 1A.
Operating temperature = 26 °C.
Discharge rate of the battery = Discharge rate of lead acid battery at 1-hour rate = 0.79 Ah.
As the motor draws 1A current according to our consideration, total time required for the battery to get completely discharged = 46.9 minutes. Since lead acid battery shouldn’t run past 80% of its charge, leaving 20% left in the battery in order to use it for multiple cycles, time taken by the battery to discharge 80% of initial charge = 46.9*0.8 = 37.52 minutes. Since number of motors is equal to number of batteries which is equal to 2, considering each motor draws equal current of 1A from different batteries, total runtime of robot with fully charged batteries = 37 minutes 52 seconds = 2270 seconds. Distance covered by robot = Velocity of robot (Vr) x Total runtime of robot = 0.3185*2270 = 722.9 m.
VII. RESULT AND DISCUSSION
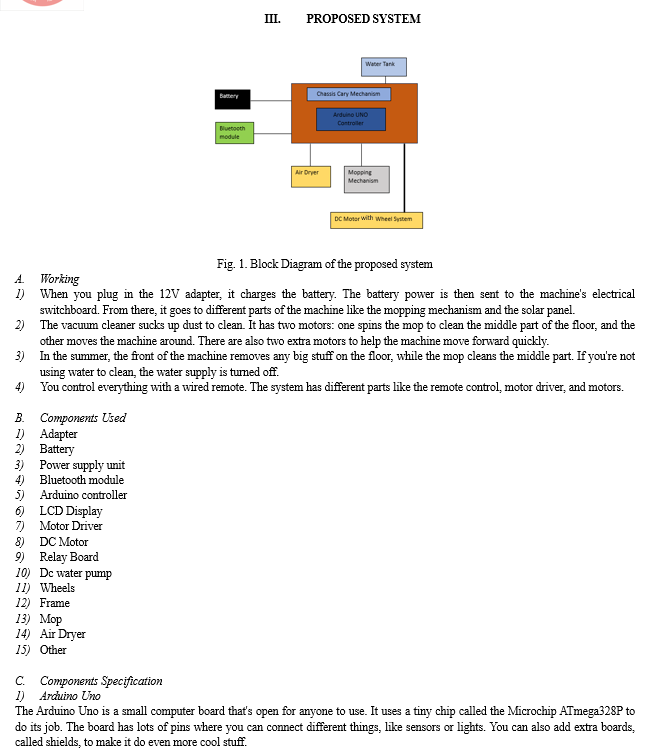
The proposed floor cleaning robot focuses on developing a smartphone-controlled multifunction floor cleaning robot capable of cleaning both typical Indian household floors and public spaces. The battery operated cleaning mechanism involves rotational mopping to ensure thorough cleaning. It follows a process of wet mopping the floor, followed by drying it, as a wet floor can lead to various issues.
To achieve this, water pumps are utilized to wet and dry the floor effectively. The cleaning process also addresses challenges posed by different types of debris encountered, ensuring proper cleaning, especially when dealing with heavier particles. Additionally, for oily surfaces, appropriate disinfectants are applied to counteract potential issues.
To ensure proper control of the machine, a wheel drive mechanism is incorporated. The control system utilizes an Arduino control board with Bluetooth communication to manage all motors and water pumps. This enables the robot to move in any direction and perform all necessary cleaning functions efficiently.
In essence, the objective is to design a portable floor cleaning machine capable of smart navigation across various floor surfaces, ensuring thorough cleaning.
A. Project Image

The new smart floor cleaning robot that you can control with your phone is a big step forward in cleaning technology. It uses Arduino and Bluetooth to make cleaning easier and more convenient for both homes and businesses. This project shows how using smart technology in everyday things can make chores easier and keep things cleaner. In the future, we can make the robot even better by improving its design and how it works, making it even better at cleaning floors.
Overall, this smart floor cleaning robot is a great solution for making floor cleaning easier and more efficient. It shows how technology can help us keep our environments clean and healthy without a lot of effort.
VIII. FUTURE SCOPE
In the future, Multifunction floor cleaning robots will undergo significant advancements, featuring longer battery life, improved cleaning efficiency, and advanced navigation capabilities. Integration with smart home systems will streamline user control and scheduling, while customization options will cater to individual cleaning preferences. Moreover, in commercial and industrial sectors, they will become essential tools for maintaining cleanliness in large spaces efficiently. With a focus on sustainability, future designs will prioritize eco-friendly materials and energy-efficient operation. Overall, the future of Multifunction floor cleaning robots is marked by enhanced performance, convenience, and environmental responsibility.
Conclusion
In the proposed paper we have introduced a floor cleaning robot designed for mopping tasks which is battery operated, aiming to address cleanliness concerns in society. The project includes various applications, including cleaning pipes, mopping surfaces for thorough floor cleaning, dust and dirt removal from roads, and implementing a pick-and-place mechanism to eliminate obstacles. This project holds significant importance for society and contributes significantly to the overall cleanliness of the country. However, there are a few areas of improvement, such as the non-detachable motor and the vibration caused by the high RPM, which can be addressed through modifications for enhanced performance. Despite these considerations, the automated floor cleaning system proves to be a successful product suitable for Indian households. The design of this automated system is versatile, allowing it to clean various remote locations effectively. Additionally, the selected motors consume minimal power, contributing to both power and cost savings.
References
[1] Prof. V. Dhopte, Karshit S. Dongre, Amey Kutarmare, Kunal Padole, Harshal Pande, Siddhesh Chaudhari, “Design of floor cleaning machine equipped with sensors and various cleaning operations”, International Research Journal of Modernization in Engineering Technology and Science, Volume:05, Issue 04 April 2023. [2] K Saravanan; E Siva Prasanna, R Satish, R Udhaya Abinesh P Anandakumar, “Automatic floor cleaning Robot” IEEE International Conference on Data Science and Information System (ICDSIS), Vol. 4, Issue 14 October 2022. [3] Raja Kumar, Md Aziz Quadri, Gautam Prasad, Gaurav Upadhyay, Anmol Kumar, Ramniwas Singh, Gaurav Kumar, “Operated flour cleaning machine”, International Journal of Research in Engineering and Innovation, Vol. 2, 06 June 2022. [4] Anju KP, Jilshida P, Sarithamol M, Thasneem P, “Smart Floor Cleaner Controlled by Raspberry Pi and Intelligent IoT”, International Journal of Innovative Research in Science, Engineering and Technology, Vol. 8, Issue 4 April 2019. [5] Sandeep. J. Meshram, Dr. G.D. Mehta, “Design and Development of Tricycle Operated Street Cleaning Machine”, Journal of Information, Knowledge And Research In Mechanical Engineering, Volume– 04, Issue- 01, Issue Oct 2016. [6] M. Ranjit Kumar1 M. Tech Student, Mechanical Engineering, “Design and Analysis of Manually Operated Floor Cleaning Machine”, Nagarjuna College of Engineering and Technology, Bangalore, India, Vol. 4, Issue 04, April-2015. [7] Mohsen Azadbakht, Ali Kiapey, Ali Jafari, “Design and fabrication of a tractor powered leaves collector machine equipped with suction-blower system”, CIGR Journal Open access at http://www.cigrjournal.org Vol. 16, No.3, September 2014. [8] Liu, Kuotsan, Wang Chulun, “A Technical Analysis of Autonomous Floor Cleaning Robots Based on US Granted Patents”, European International Journal of Science and Technology Vol. 2 No. 7 September 2013. [9] Abhishek Chakraborty, Ashutosh Bansal “Design of Dust Collector for Rear Wheel of Four-Wheeler” International Journal of Emerging Technology and Advanced Engineering, Volume 3, Issue 7, July 2013, 199216.
Copyright
Copyright © 2024 Dr. P. D. Khandait, Tejas N. Bhende, Komal R. Kalambe, Komal C. Dubey. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET59456
Publish Date : 2024-03-27
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online