

Ijraset Journal For Research in Applied Science and Engineering Technology
Cross-Correlation Driven Aerial Image Segmentation: Leveraging Multi-Scale Features and Edge Information
Authors: K. Subha, B. Gokul, D. Kamal Navas, K. Yashwin
DOI Link: https://doi.org/10.22214/ijraset.2024.61574
Certificate: View Certificate
Abstract
Semantic segmentation of remote sensing images is crucial for interpreting these large, rich in information scenes and our study introduces a new method for segmenting remote sensing imagery (RSI) when faced with limited training data and imbalanced classes. Our approach utilizes a unique potential function that merges information from both super pixel segmentation and edge detection. This combination allows the model to effectively analyze features at various scales and reduce the influence of potential errors in super pixel segmentation. Furthermore, the inclusion of edge details extracted via the Sketch token algorithm refines object boundaries, yielding more accurate segmentation results. This work offers a promising solution for achieving reliable interpretation of RSIs in scenarios with limited training data.
Introduction
I. INTRODUCTION
Remote sensing satellite image is an efficient means of obtaining geospatial information and data. Compared with traditional aerial photography, it has unique advantages. Remote sensing satellites have a large monitoring area and can transmit, process, and dynamically monitor data in real time. The most important thing about research on remote sensing images of urban areas is how to effectively segment and extract architectural objects in the images. The use of remote sensing satellite technology for urban image segmentation has become an important means of planning cities and studying urban areas. How to obtain building information accurately and dynamically has arisen the interest of researchers. However, due to the wide variety of buildings together with complex and changeable image backgrounds, building image segmentation has always been a thorny problem. Semantic segmentation predicts the semantic labels for each pixel in an image.
Semantic segmentation of high resolution remote sensing images (HRSI) is the cornerstone of remote sensing interpretation. It is of great importance in many fields, such as mapping, navigation, land resource management, etc. [1] [2] [3]. Specifically, land cover maps depict local and overall landscape conditions, from which environmental change trends can be obtained. Semantic segmentation can be used to assess urban development and estimate the impact of natural disasters. Since remote sensing technology has advanced, HRSI with more complex pixel representation have become more readily available. Semantic segmentation is more crucial and challenging for HRSI. Traditional semantic segmentation methods rely on expert experience and complex human-designs. Moreover, the segmentation performance relies on the accuracy and suitability of manually designed features. With robust feature modelling capabilities, deep learning technology has become an effective method used for semantic segmentation of HRSI, and researchers have applied deep learning technology to this operation. Specifically, a convolutional neural network (CNN) has been widely used in semantic segmentation and achieved satisfactory results. To further enhance the accuracy of semantic segmentation, researchers focus on both contextual information fusion and the refinement of segmentation results.
To achieve contextual information fusion, several network variants are proposed to enhance contextual aggregation. PSPNet developed spatial pyramid pooling to acquire a rich, multi-scale context. The Deep lab series utilized the atrous spatial pyramid pooling (ASPP) to gather contextual clues, which consisted of parallel atrous convolutions with different dilated rates. GCN removed the pooling in the network and developed a large decoupling convolution kernel to extract features. The large convolution kernel can obtain a large receptive field and is beneficial to the capture of long-range contextual information. However, the above methods fail to model the global contextual dependencies across an entire image [4] [5] [6]. Recently, self-attention mechanisms commonly used in natural language processing (NLP) have been widely used for visual tasks with exciting results. Wang et al. first proposed self-attention to capture global dependencies. Developed DANet to model non-local dependencies in position and channel dimensions.
Instead of calculating self-attention at each point, EAMNet utilized the expectation-maximization iteration manner to learn a more compact basis set, and then carried out self-attention. To model spatial long-range dependencies, CCNet proposed recurrent a criss-cross attention module. Yuan et al. developed OCNet with interlaced sparse self-attention. The above methods show that the self-attention operation is an effective way to capture global dependencies.
For the refinement of segmentation results, the current semantic segmentation network uses several strategies. One is to obtain the high-level semantic information gradually via down-sampling and then integrate the features of various levels through the decoder to recover the details. For example, Long et al. proposed fully convolutional networks (FCNs) that restored the original image size by incorporating the low-level features and high-level features. Seg-Net retained the index of the maximum position when pooling, and the index was reused when up sampling. U-Net adopted skip-connections to connect shallow layers and deep layers. RefineNet utilized a Laplacian image pyramid to explicitly model the available information during down sampling and predictions from coarse to fine [12] [15]. Another potential strategy is to learn semantic information while maintaining high resolution feature maps. For example, HRNet proposed a parallel structure backbone network, which maintained high resolution characteristics during the entire process. Additionally, several networks refine the segmentation edges to obtain more precise semantic segmentation results. Gated-SCNN deconstructed the edge information from the regular features and used a shape branch to focus on semantic boundary information. SegFix proposed a post processing method to refine the boundaries of semantic segmentation results. ERN developed the edge enhancement structure and the loss function used to supervise the edge to enhance the segmentation accuracy.
II. LITERATURE SURVEY
Yuansheng Hua [1] stated convolutional neural networks (CNNs) for very high-resolution images requires a large quantity of high-quality pixel-level annotations, which is extremely labor-intensive and time consuming to produce. Moreover, professional photograph interpreters might have to be involved in guaranteeing the correctness of annotations. To alleviate such a burden, we propose a framework for semantic segmentation of aerial images based on incomplete annotations, where annotators are asked to label a few pixels with easy-to-draw scribbles.
Irem Ulku and Erdem Akagndz [2] suggested automatic semantic segmentation for trees using satellite and/or aerial images. Still, several challenges can make the problem difficult, including the varying spectral signature of different trees, lack of sufficient labelled data, and geometrical occlusions. In this article, we address the tree segmentation problem using multispectral imagery. While we carry out large-scale experiments on several deep learning architectures using various spectral input combinations, we also attempt to explore whether hand-crafted spectral vegetation indices can improve the performance of deep learning models in the segmentation of trees.
Wenjie Liu and Wenkai Zhang [3] mentioned semantic segmentation in aerial images has become an indispensable part in remote sensing image understanding for its extensive application prospects. It is crucial to jointly reason the 2-D appearance along with 3-D information and acquire discriminative global context to achieve better segmentation. However, previous approaches require accurate elevation data (e.g., nDSM and Digital Surface Model (DSM)) as additional inputs to segment semantics, which sorely limits their applications. On the other hand, due to the various forms of objects in complex scenes, the global context is generally dominated by features of salient patterns (e.g., large objects) and tends to smooth inconspicuous patterns (e.g., small stuff and boundaries).
S. Girisha and Ujjwal Verma [4] discussed about aerial videos has been extensively used for decision making in monitoring environmental changes, urban planning, and disaster management. The reliability of these decision support systems is dependent on the accuracy of the video semantic segmentation algorithms. The existing CNN-based video semantic segmentation methods have enhanced the image semantic segmentation methods by incorporating an additional module such as LSTM or optical flow for computing temporal dynamics of the video which is a computational overhead. The proposed research work modifies the CNN architecture by incorporating temporal information to improve the efficiency of video semantic segmentation.
Siyu Liu and Jian Cheng [5] detailed about semantic segmentation for unmanned aerial vehicle (UAV) remote sensing images has become one of the research focuses in the field of remote sensing at present, which could accurately analyze the ground objects and their relationships. However, conventional semantic segmentation methods based on deep learning require large-scale models that are not suitable for resource constrained UAV remote sensing tasks. Therefore, it is important to construct a light-weight semantic segmentation method for UAV remote sensing images. With this motivation, we propose a light-weight neural network model with fewer parameters to solve the problem of semantic segmentation of UAV remote sensing images. The network adopts an encoder-decoder architecture.
Wenjie Liu and Yongjun Zhang [6] discussed about semantic segmentation of remote sensing (RS) image is a hot research field. With the development of deep learning, the semantic segmentation based on a full convolution neural network greatly improves the segmentation accuracy. The amount of information on the RS image is very large, but the sample size is extremely uneven. Therefore, even the common network can segment RS images to a certain extent, but the segmentation accuracy can still be greatly improved. The common neural network deepens the network to improve the classification accuracy, but it has a lot of loss to the target spatial features and scale features, and the existing common feature fusion methods can only solve some problems.
III. RELATED WORK
A. Problem Statement
Semantic segmentation of remote sensing images involves classifying each pixel in an image according to its land cover or land use category. Traditionally, deep convolutional neural networks (CNNs) with full supervision have been used for this task, achieving impressive results. However, this approach requires a vast amount of pixel-level ground truth data for training, which is laborious and expensive to generate. To address this challenge, we propose a novel model that can effectively perform semantic segmentation with limited training data.
B. Convolutional based Image Segmentation
Backgrounds in remote sensing images can be cluttered and visually intricate. Objects within the image can vary greatly in size. The image may contain a large number of small objects that are difficult to segment accurately. The foreground (objects of interest) may occupy a much smaller area compared to the background. Many existing models primarily focus on capturing contextual information and neglect these specific challenges. The SPANet model addresses these issues by introducing two key components.
Convolution tackles the problems of complex backgrounds and large-scale differences by expanding the receptive field of the network through cascaded atrous convolutions. This decoder incorporates spatially adaptive convolutions to improve the model's ability to handle numerous small objects and extreme foreground-background imbalance. SPANet achieves superior performance compared to several prevalent methods on benchmark datasets. However, there is still room for improvement in terms of reducing the number of parameters and improving inference speed.
???????C. Drawbacks of Existing System
Existing methods may struggle to extract objects from complex and densely populated areas if they rely heavily on initial segmentation steps. Directly fusing features from shallow and deep layers can lead to suboptimal segmentation results. Complex backgrounds with rich details can still pose difficulties for existing methods. Some models may not fully leverage global and local knowledge about building structures. Inability to effectively capture features at different scales using convolution kernels of varying sizes can hinder performance.
???????D. Cross-Correlational Learning
Enhanced Vision Representation Learning utilizes a multiscale convolutional kernel approach to efficiently capture features at different scales. It avoids the drawbacks of processing multiple images at different resolutions or introducing a large number of parameters with fixed-size kernels. We incorporate deformable convolution within the Vision Representation Learning model to further expand the receptive field and improve feature extraction. To recover the original image size after processing, we employ a deconvolutional network instead of a fully connected layer. This allows for efficient up sampling of feature maps. CCL addresses the challenges associated with complex backgrounds and limited information in shallow feature maps.
CCL incorporates a local attention mechanism that focuses on the relationships between a specific pixel and its surrounding neighbours. This allows the model to prioritize relevant spatial details within the image, crucial for accurate segmentation, especially around object boundaries. CCL effectively combines high-level semantic features (extracted from deep layers) with low-level spatial details (captured by shallow layers). This fusion process leverages the strengths of both feature types, resulting in more robust and accurate segmentation. It overcomes the limitations of simply fusing features from different layers, which can introduce noise and redundancy. At the core of CCL lies a cross-correlation operation. This operation calculates the correlation between different feature maps, capturing the interdependence between features across channels. This allows the model to exploit the relationships between different aspects of the image data, leading to a more comprehensive understanding of the scene. By incorporating these elements, CCL effectively addresses the limitations of existing methods in handling complex backgrounds, small objects, and the need for information exchange across feature channels
???????E. Advantages of Proposed System
The enhanced Vision Representation Learning module with multiscale convolutional kernels allows the model to handle complex models more effectively, leading to better overall performance. By combining deformable convolution with Vision Representation Learning, the model overcomes the limitations of standard convolutions. This leads to improved feature extraction accuracy for category recognition, particularly for small and intricate objects, without introducing additional computational burden. The Cross-Correlation Learning module tackles the challenge of small object segmentation. It expands the receptive field of low-level feature maps, enabling the model to capture more precise semantic information from these smaller objects. The model dynamically assigns weights to different feature channels during training. This process amplifies relevant features crucial for segmentation while suppressing irrelevant information, leading to a more focused and efficient learning process. The use of multiscale features ensures the model captures information at various scales within the image. This comprehensive feature extraction significantly improves the accuracy of target object detection within the remote sensing imagery.
IV. IMPLEMENTATION
Cross-correlation model use techniques that involves comparing a target image with a reference image to identify similarities between them. By sliding the reference image across the target image and computing a similarity metric at each position, it's possible to identify regions in the target image that match the reference image. This process can be used in various image processing tasks to enhance dense connections to improve the semantic information capture ability and also solves the multiscale problem of optical remote sensing images. Improves the performance of the model by modeling global information dependencies.
A. Image Representation
First, both the target image and the reference image need to be represented in a suitable format for processing. Typically, images are represented as matrices or tensors where each element represents a pixel value. The dimensions of the matrices correspond to the height and width of the images, and for color images, there are typically multiple channels (e.g., red, green, and blue).
B. Define the Reference Image
In the context of image segmentation, the reference image serves as a template or filter that we want to match within the target image. The size and content of this reference image depend on the specific segmentation task and the features we are trying to detect.
C. Cross-Correlation Operation
The cross-correlation operation involves sliding the reference image (kernel) over the target image and computing a similarity metric at each position. This is often achieved using convolution operations. For each position, the dot product between the pixels of the reference image and the corresponding pixels in the target image patch is computed. This dot product represents the similarity between the two patches.
D. Similarity Metric
Various similarity metrics can be used, with the choice depending on the specific application and requirements. Common similarity metrics include sum of squared differences (SSD), normalized cross-correlation (NCC), and sum of absolute differences (SAD). Normalized cross-correlation is often preferred as it is less sensitive to changes in lighting conditions and image contrast.
E. Thresholding and Segmentation
Once the cross-correlation operation is performed, the resulting similarity map needs to be thresholded to identify regions of interest. Thresholding involves setting a threshold value and classifying pixels as belonging to the object of interest if their similarity score exceeds this threshold. The threshold value can be determined empirically or through techniques such as Otsu's method for automatic threshold selection.
 ???????
???????
Conclusion
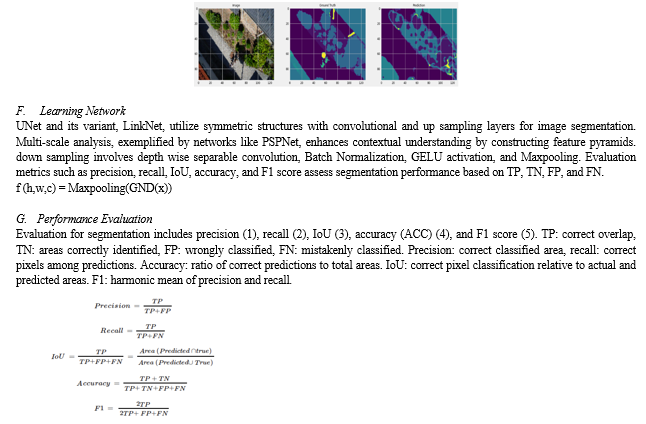
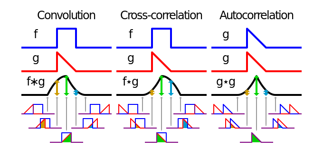
A. Conclusion Proposed a multi-objective semantic segmentation algorithm based on an enhanced U-Net network to improve the recognition accuracy of diverse ground objects in the transportation facility construction area. Firstly, a sample dataset of transportation facility construction scenes based on remote sensing images is constructed. To address the problem of a limited number of image samples that contained target objects and an imbalanced distribution of the various training samples, this paper introduces a virtual data augmentation technique. This method aims to augment the number of training samples and balance the distribution of the various training samples. At the same time, the recognition accuracy of the model is improved by using transfer learning. B. Future Works Cross-Correlation Learning (CCL) demonstrates promising results for semantic segmentation of remote sensing images with limited training data, there\'s always room for exploration. Standard cross-correlation captures dependencies between different feature maps. Investigating the use of autocorrelations within a single feature map can be an interesting direction. Autocorrelation can reveal inherent self-similarity patterns within a feature map, potentially leading to a deeper understanding of the image content and improved feature representation. This could be particularly valuable for tasks like segmenting repetitive textures or homogeneous regions frequently encountered in remote sensing imagery (e.g., forests, water bodies). Currently, CCL utilizes a fixed kernel size for the cross-correlation operation. Exploring learnable correlation kernels could be a promising avenue. These learnable kernels would allow the model to dynamically adapt the correlation operation based on the specific image content. This could potentially lead to more nuanced capture of feature dependencies and improve segmentation accuracy, especially for complex scenes with varying object sizes and textures. Our current architecture utilizes CCL as a single module. Investigating a hierarchical approach with multiple autocorrelation layers stacked together is an interesting direction. Each layer could operate at a different spatial scale, progressively capturing long-range and short-range dependencies within the image data. This hierarchical structure could potentially lead to a more comprehensive understanding of the image\'s spatial relationships and enhance the segmentation performance. A potential future direction is to combine the power of autocorrelations with attention mechanisms. Attention mechanisms focus on specific regions of the image based on their relevance to the segmentation task. By incorporating autocorrelations within the attention modules, the model could not only focus on relevant image regions but also leverage the inherent self-similarity patterns within those regions, potentially leading to even more precise and robust segmentation results. These future research directions, leveraging autocorrelations, hold promise for pushing the boundaries of remote sensing image segmentation, particularly when dealing with limited training data.
References
[1] M. M. Nielsen, \"Remote sensing for urban planning and management: The use of window-independent context segmentation to extract urban , . [2] K. Nogueira et al., \"Exploiting convnet diversity for ooding identica- Sep. , . [3] G. Passino, I. Patras, and E. Izquierdo, \"Aspect coherence for graph-based , . [4] T. Blaschke et al., \"Geographic object-based image analysistowards a new , . [5] Q. He, X. Sun, Z. Yan, and K. Fu, \"DABNet: Deformable contextual and boundary-weighted network for cloud detection in remote sensing doi: , ., /TGRS., ., . , R. Guo et al., \"Pixel-wise classication method for high resolution remote no. , p. , , doi: , ., /ijgi, . [6] J. Wang, L. Shen, W. Qiao, Y. Dai, and Z. Li, \"Deep feature fusion with integration of residual connection and attention model for classication Art. no. , . [7] Q. He, X. Sun, W. Diao, Z. Yan, D. Yin, and K. Fu, \"Transformer- induced graph reasoning for multimodal semantic segmentation in remote , . [8] Y. Zhang, J. Zhang, Q. Wang, and Z. Zhong, \"DYNet: Dynamic con- volution for accelerating convolutional neural networks, \" CoRR, , . [9] X. Li et al., \"Semantic ow for fast and accurate scene parsing, \" in Proc. [10] R. Niu, X. Sun, Y. Tian, W. Diao, Y. Feng, and K. Fu, \"Improving semantic segmentation in aerial imagery via graph reasoning and disentangled doi: , ., /TGRS., ., . , K. He, X. Zhang, S. Ren, and J. Sun, \"Delving deep into rec- tiers: Surpassing human-level performance on imagenet classica- doi: , ., /ICCV., ., . [11] Y. Liu, B. Fan, L. Wang, J. Bai, S. Xiang, and C. Pan, \"Semantic labelling in very high resolution images via a self-cascaded convolutional neural , . [12] L.-C. Chen, Y. G. Zhu, F. P. Schroff, and H. Adam, \"Encoder-decoder with atrous separable convolution for semantic image segmentation, \" in Proc. [13] S. Girisha et al., \"Semantic segmentation of UAV videos based on temporal , [14] J. Li, Y. Zhao, J. Fu, J. Wu, and J. Liu, \"Attention-guided network for , . [15] M. Pai, V. Mehrotra, U. Verma, and R. M Pai, \"Improved semantic segmentation of water bodies and land in SAR images using generative , . [16] A. Rangnekar, N. Mokashi, E. Ientilucci, C. Kanan, and M. J. [17] H. Wang, W. Wang, and J. Liu, \"Temporal memory attention for video semantic segmentation, \" , arXiv:, ., . , J. Wang, Y. Zhang, J. Lu, and W. Xu, \"A framework for moving target de- tection, recognition and tracking in UAV videos, \" in Proc. Affect. Comput. [18] J. Zhu et al., \"Urban trafc density estimation based on ultrahigh- , J. F. Galarreta, N. Kerle, and M. Gerke, \"UAV-based urban structural damage assessment using object-based image analysis and semantic rea- , . [19] F. Nex, D. Duarte, A. Steenbeek, and N. Kerle, \"Towards real-time building no. , , Art. no. , . [20] S. Liu, C. He, H. Bai, Y. Zhang, and J. Cheng, \"Light-weight attention se- mantic segmentation network for highresolution remote sensing images, \" ,
Copyright
Copyright © 2024 K. Subha, B. Gokul, D. Kamal Navas, K. Yashwin. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61574
Publish Date : 2024-05-04
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online