

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Analysis of a Mecanum Wheel
Authors: Jason Joseph, Noumaan Hawaldar, Arun Narayan, Akhil Pramod
DOI Link: https://doi.org/10.22214/ijraset.2022.45552
Certificate: View Certificate
Abstract
Robots such as Rover travel and collect data in parts of the world that are difficult to access by humans. Through innovation, the proposed project framework uses a rover as a platform for sensing devices and application-specific devices to eliminate the delay and inconvenience caused by humans, rescue teams, and research teams.
Introduction
I. INTRODUCTION
Remote locations where humans cannot work are the perfect location for the Rover, an unmanned vehicle that travels and collects data. Using a rover as one platform for sensing devices and application specific devices, and leveraging innovation to address delays faced by researchers, rescue teams, and rescuers is the project's proposed framework. A rover's main component is its Mecanum wheel, which allows it to travel in any direction. Combining individual wheel rotations on Mecanum wheels can move a vehicle in any direction. Since the rollers' sequential contact with the ground causes the mecanum wheel to move vertically and horizontally, the wheel is prone to vertical and horizontal movements. Four degrees of freedom (DOF) have been provided by the robotic arm. It is operated by an Arduino Mega 2560 R3 CPU, which receives human input through potentiometers. The arm is composed of four rotating joints and an end effector, with a servomotor providing rotational motion. The Arduino has been programmed to spin each servo motor in line with the rotation of the potentiometer shaft. The primary goal of the Mecanum wheel-based Rover is to provide cost-effective, efficient, quick, and safe information to research or rescue teams.
II. CIRCUIT DIAGRAM
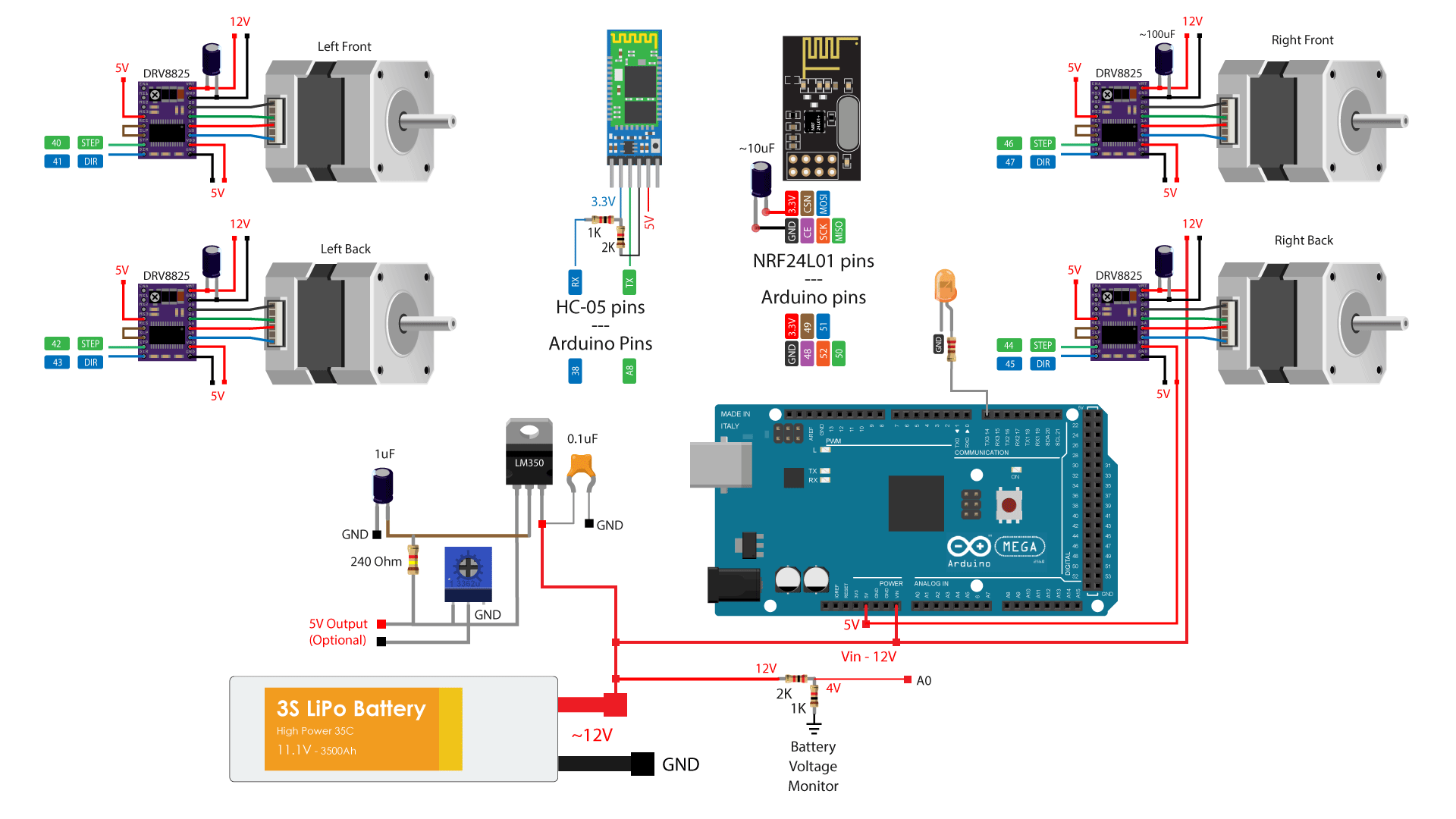
Four NEMA 17 stepper motors are controlled by four DRV8825 stepper drivers; A4988 stepper drivers might also be utilized. We utilized a 12V power source to power the steppers and the complete rover, and I used a 3S Li-Po battery with a voltage of around 12V. The NRF24L01 radio communication module is utilized, while the HC-05 Bluetooth module is used for Bluetooth connectivity. To monitor the battery voltage, a simple voltage divider is utilized, as well as an LED connection to signal when the voltage drops below 11V. A four-degree-of-freedom robotic arm has been created (DOF). The user controls it with an Arduino Mega 2560 R3 microcontroller, which collects input signals from the user through a series of potentiometers
The arm is made up of four rotating joints and an end effector, with rotary motion provided by a servomotor. The Arduino has been programmed to provide rotation to each servo motor in accordance to the rotation of the potentiometer shaft. A 5V voltage regulator capable of providing around 3A of current was also added.
III. PROPOSED METHODOLOGY
The proposed system involves using a rover as a platform for sensing devices and application-specific devices in Forklifts, Electric Cars, Factor Robots, and Amazon Delivery Robots. The primary purpose is to offer the appropriate authorities with a guide to assist them in assessing information obtained via research with the rover and establishing a rescue strategy that is cost effective, efficient, rapid, and safe for the search and rescue crew.
IV. MECANUM WHEELS
A. What exactly are Mecanum Wheels?
A Mecanum wheel is one that has rollers mounted around its circumference. Each roller revolves around an axis that makes a 45-degree angle with the plane of the disc. In compared to traditional wheels, such a design gives significant kinematic benefits for Mecanum wheels. Bengt Erland Ilon (1923-2008), the inventor of mecanum wheels.

B. Working
A Mecanum wheel is one that has rollers around the circumference. These rollers are positioned diagonally or at a 45-degree angle to the axis of rotation of the wheel. The wheel produces force diagonally when moving forward or backward. As a consequence, by turning the wheels in a precise sequence, we can leverage these diagonal forces to allow the robot to go in any direction.

C. DOF Arm
The 4-DOF robot arm features four joints that move along the x, y, and z axes, respectively, to mimic a human upper arm. The joints move four arm links to achieve the desired wrist position, which will be assembled with the hand in future applications. The components and mechanism were investigated to ensure that they matched in terms of size and capacity to raise the weight. The actuators for the four joints are 9G servo motors with predicted torque. Overall, the built robot arm demonstrated that the suggested design can meet the design criteria and move in a variety of positions in real time.

V. PROBLEM STATEMENT
The primary motivation for the development of Rover, an autonomous vehicle that drives to difficult-to-reach regions where a human cannot operate. We also employed Mecanum wheels, which can travel in any direction (horizontal, forward, backward, and so on). A (DOF) arm is used to choose and put objects or gather data, allowing humans to save as much time as possible.
VI. PCB DESIGN & ARDUINO
A. Arduino
The ATmega2560 microprocessor lies at the heart of the Arduino Mega 2560 microcontroller board. It comes with 54 digital I/O pins, 16 analogue I/O pins, 4 UARTs (hardware serial ports), a 16 MHz crystal oscillator, a USB connection, a power connector, an ICSP header, and a reset button. It comes with everything you need to get started with the microcontroller; simply connect it via USB to a computer or power it with an AC-to-DC converter or battery. Most shields built for the Uno and previous boards Accordance with part or Mini computers are compatible with the Mega 2560 board.


B. Hardware Used:

VIII. FEATURES
“The following functionalities are included in the "AI Based Rover Using Arduino.":
- Step-by-Step directions.
2. Users and devices are unlimited.
3. Planning / Saving Current routes
4. Controlling may be done with a mobile app or an RC controller.
5. Data collection is greatly hampered by the limited operational duration.
IX. FUTURE SCOPE
The field of electronics and robotics offers several opportunities for expanding current research. A variety of sensors and equipment, like as thermal cameras, heat sensors, and pressure sensors, are available on the market and might be used to enhance the rover's present capabilities. It may be utilized in industries for forklifts, electric automobiles for ambulances, and other situations when a person cannot function.
Conclusion
The primary purpose is to provide the relevant authorities with a tool to aid them in obtaining data through observation using the rover and designing a rescue strategy that is cost effective, efficient, fast, and safe for the rescue team.
References
. Ransom, O. Krömer, and M. Lückemeier, “Planetary rovers withmecanum wheels,” 16thISTVS Intl Conf, 25-28 Nov, 2008, Torino, Italy. [2] M. Popa, “Hand gesture recognition based on accelerometer sensors”, in Networked Computing and Advanced Information Management (NCM),pp.-115twelve0, 2011. [3] A. Gfrerrer. “Geometry and kinematics of the Mecanum wheel”. Computer Aided Geometric Design 25 (2008) 784-791 [4] K. E. Clothier and Y. Shang, “A Geometric Approach for Robotic Arm Kinematics with Hardware Design, Electrical Design, and Implementation,” J. Robot., 2010. [5] Mr. John J. Craig, “Introduction to Robotics: Mechanics and Control” [6] Yunan Zhang, Tao Huang. ‘” Research on a Tracked Omnidirectional and Cross-Country Vehicle”. Mechanism and Machine Theory 87 (2015) 18-44. [7] Killough, S.M., and Pin, F.G., 1994], “A New Family of Omnidirectional and Holonomic wheeled platforms for mobile robots”, IEEE Transactions on Robotics and Automation, Vol.10, No.4, pp. 480-489 [8] “Design and Control of an Omni-directional Mobile Robot”, Ioan Doroftei, Victor Grosu & Veaceslav Spinu
Copyright
Copyright © 2022 Jason Joseph, Noumaan Hawaldar, Arun Narayan, Akhil Pramod. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET45552
Publish Date : 2022-07-12
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online