

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Development Chairless Chair
Authors: Prof. M. D. Jagtap, Shinde Savta Vitthal, Jagtap Rushikesh Navnath, Nikam Ranjit Maruthi
DOI Link: https://doi.org/10.22214/ijraset.2024.59113
Certificate: View Certificate
Abstract
It is very difficult to stand and work for overall shift in the company by a worker. This will reduce the efficiency of the worker. The solution to this problem is to have a portable device which has an ergonomic design, low cost exoskeletons. In this work a mechanical ergonomics device that is designed around the shape and function of the human body, with segments and joints corresponding to those of the person it is externally coupled with. It functions as a chair whenever it is needed and is coined as Chair less Chair. Worker in industrial can wear it on legs like an exoskeleton. It locks into place and you can sit down on it. The device never touches the ground, which makes it easier to wear: a belt secures it to the hips and it has straps that wrap around the thighs. These are specially designed and part of the mechanism, but an alternate version works with any footwear and touches the ground only when in a stationary position. The user just moves into the desired pose. It will fit closely to lower part of the body as an external body part on which maximum body forces act upon. It is a cost effective product and any error in design may fail the structure which creates loss. So, these forces should be carefully analyzed during the design of structure. The best way to predict these forces during pre-manufacturing stage is to make an analysis on the structure with the help of software. This helps in estimating the stresses induced on the structure which is one of the most important criteria for evaluation of the model.
Introduction
I. INTRODUCTION
Exoskeletons are defined as standalone anthropomorphic active mechanical devices that are “worn” by an operator and work in concert with the operator’s movements. Exoskeletons are mainly used to increase performance of able-bodied wearer. (e.g. for military applications), and to help disabled people to retrieve some motion abilities. (such exoskeletons are called “active orthoses” in the medical field).
As we know, the normal motor capability of legs is crucial and important for human-being’s daily life. Legs, however, are apt to be injured in accident. And the Rehabilitation is essential for the patients to recover after leg operation. Additionally, diseases, stoke for instance, can also result in the loss of leg function. In order to regain the motor capability, the leg rehabilitation is a fundamental therapeutic approach. Basically Exoskeletons are of two types:
II. LITERATURE
In this paper we are very much interested in the wearable devices which help in increasing the efficiency of the human and decrease the rate of fatigue of human during work. The device discussed here is the passive device. This device is known as Chairless Chair which helps the wearer to work effectively at any location in a sitting posture.
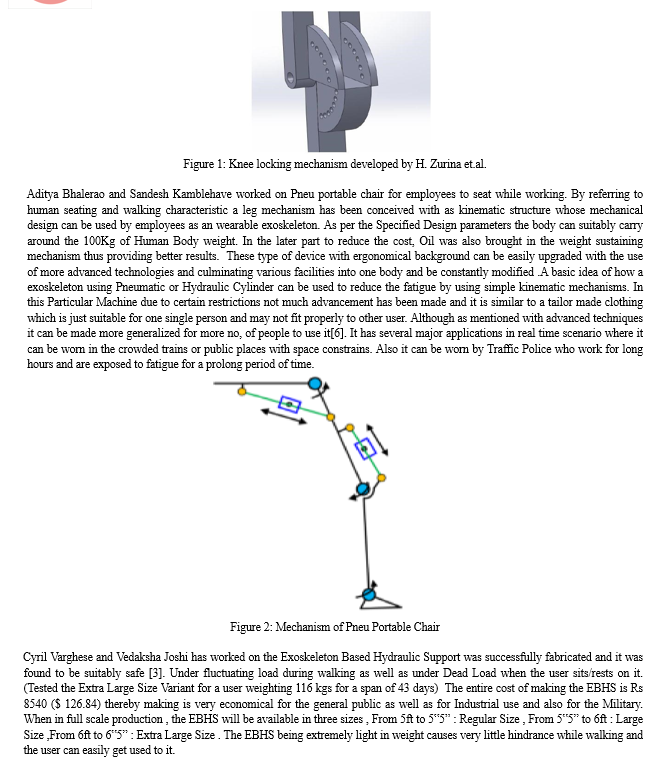
H. Zurina and A. Fatinhas worked on the Design and Development of Lower Body Exoskeleton. In his paper an attempt has been made to evaluate the possibility of using the Chairless chair that will help in increasing the energy efficiency and offer weight support when the user feels tired rather than continuously taking on the weight[2].
Other than that, in term of ergonomics, and the objectives to give comfort to user has achieved by give choices to user to choose their comfort degree level from 45° to 90°.
Apart from the benefit of his experiment it can be conclude that his design still confront with some problems that need to fix in future so that the objective to give an ergonomic chair to user can be achieved. The experiment testing has been conducted for our prototype to our group member with weight of 80kg and height around 170cm. From the result of experiment testing, it can be observed that for height and weight, the Chair less chair doesn’t give any effect in lack or over measure in its height dimension. It suit the user which prove that this chair can be wear by people from any height range. He tester were required to use the chair while do some work, it was observed that, he had difficulties in changing the degree level.

V. METRIAL SLECTION
For the exoskeleton leg we selected a lighter stronger and flexible material. Here we have selected aluminum alloy give good characteristic machinability brazeability and corrosion resistance.
Conclusion
The exoskeleton does not consumes any power for its operation. This device is eco-friendly as it does not pollute the environment. This Chairless is light in weight, mobile & reliable, easy to carry and does not require any extra space. The future work will concentrate more on making it lighter in weight and more compact.
References
[1] DESIGN AND FABRICATION OF EXOSKELETON BASED HYDRAULIC SUPPORT. Cyril Varghese, Vedaksha Joshi, Vinayak Waghmare, Ajal Nair, Albey David, International Journal of Advanced Research (2016), page no.22 [2] AISI 4140 Alloy Steel (UNS G41400), http://www.azom.com/article.aspx?ArticleID=6769, page no 2 [3] Design and Implementation of Chair Less Seating Arrangement for Industrial Workers and Farmers, Rushikesh M. Magdum Sachin M. Jadhav, GRD Journals- Global Research and Development Journal for Engineering | Volume 3 | Issue 8 | July 2018, page no-5 [4] A Review on Chairless Chair, Jaiswal Pradeepkumar, Ankit chaudhary, Gurmeet Singh, IRJET, April 2020, page no6343 [5] Design and Analysis of Lower Limb Exoskeleton, N. Siva Nagamani, V. Mohan Srikanth, IJIRST –International Journal for Innovative Research in Science & Technology| Volume 3 | Issue 12 | May 2017, ISSN (online): 2349-6010, page no 61.
Copyright
Copyright © 2024 Prof. M. D. Jagtap, Shinde Savta Vitthal, Jagtap Rushikesh Navnath, Nikam Ranjit Maruthi . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET59113
Publish Date : 2024-03-18
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online