

Ijraset Journal For Research in Applied Science and Engineering Technology
Review on Design and Development of Four Directional Fire Protection System
Authors: Dr. P. G. Mehar, Ashutosh Sarang Kale, Ajay Prakash Agre, Shreyash Sunil Nagare, Ajay Vasant Shende, Ankit Nandkishor Bure
DOI Link: https://doi.org/10.22214/ijraset.2024.58654
Certificate: View Certificate
Abstract
The Development of an autonomous Four-directional fire-fighting robot has long been approaching. The creation of such equipment makes it possible to rescue people and property more quickly with less fire damage. As professionals, it is our responsibility to design and evaluate fire extinguishers and extinguishers. For this project we created a solar powered feature for uninterruptible power supply. Wireless controlled mobile robot. The robot can move around the building model, locate the fire, and then extinguish it using water spray. The development of autonomous firefighting robots is a long-standing need. Thanks to the development of this equipment, people and goods can be rescued quickly, with little fire damage. As experts, our job is to design and test fire detection and suppression systems. In this project, we developed a solar energy function for non-interruptive energy products. Wireless mobile robots. The robot can move within the building model, find the fire and extinguish it with the help of water spray.
Introduction
I. INTRODUCTION
Robotics is one of the fastest growing engineering fields today. Robots are designed to perform dangerous or heavy work without human assistance and in adverse conditions. Today, the use of robots is more common than ever and is not limited to heavy industry enterprises. The birth of autonomous firefighting robots is approaching. Thanks to the development of such equipment, people and equipment can be rescued faster with less fire damage. As professionals, it is our responsibility to design and evaluate fire extinguishers and extinguishers.
Pollution also decreases. In this project, we are creating a wirelessly controlled robot. The model is the only thing that can walk on the building, find the fire and then extinguish it with the help of sprinklers. The aim of this project is to create a fire extinguisher that can be controlled via Bluetooth (BT) technology.
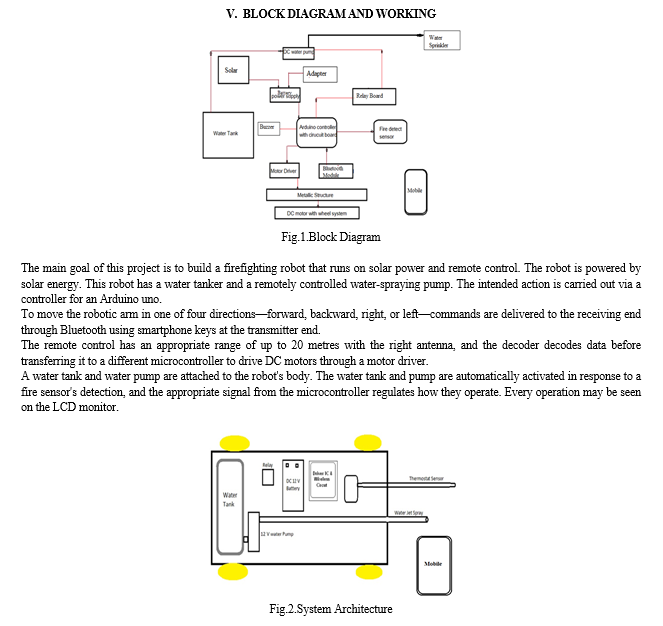
Wirelessly controlled water pumps and water tankers are also part of the robot set. An Arduino Uno controller is used for the specified function. The buttons are used to send instructions from the sending end to the receiving end and tell them to move the robot forward, backward, left, right, etc. It is used to tell them to continue. At the other end, the microcontroller is connected to three motors, two of which are used to move the car and one to operate the robot arm. The receiver decodes the signal before sending it to another microcontroller to drive the DC motor through the motor driver IC, which performs the necessary functions. The BT transmitter can then be used as a BT remote control with a suitable range (up to 30 meters with the right antenna). The microcontroller gives the necessary signals from the transmission to the tip to control the operation of the water tank and water pump placed on the robot body. All functions are controlled by the Arduino Uno board. The controller drives the motor through the microcontroller connected to the microprocessor and driver IC. This concept can be further developed by adding a wireless camera to the robot so that a supervisor can observe the robot's performance remotely.
II. PROBLEM DEFINATION
- Fire is a dangerous event that can cause serious damage and injuries. It can be difficult for firefighters to reach a fire due to chemical explosion, smoke and heat.
- Dangerous situations can endanger the lives of firefighters. In these cases, electronic fire extinguishers will help. These firefighters use Internet of Things technology.
- Our goal as firefighters is to find them and approach them to create a small fire truck. A lot of things happen when firefighters arrive late.
- Fire-fighting robots constantly monitor their surroundings and extinguish fires without any problems.
III. OBJECTIVE AND NEED
- Create a wireless-based automatic firefighting robot.
- Movement of robot can control wirelessly through Bluetooth technology.
- Control the robot's power wirelessly with Bluetooth technology.
- Use the robot's solar energy to continue electrical work in case of fire.
- Automatic sensor-based electronic detection system is used. Add versatile wireless monitoring system.
- A new DC generator has been added to power the water output from the pump.
A. Need
Responsibility for protecting and preserving an institution's structures, collections, activities and residents lies with cultural property management. Reducing the negative impacts of climate, pollution, theft, vandalism, insects, mold and fire requires ongoing attention. Fire is one of the most dangerous threats due to the speed and breadth of its destructive power. Damaged or environmentally damaged structures can be repaired and stolen items can be returned. However, items lost in a fire are lost forever. An uncontrolled fire can burn an entire building in a matter of hours or destroy an entire building in minutes. Therefore, fire suppression activities became necessary to protect life and property.
For this we wanted to create a robot firefighter. Autonomous robots are machines that can operate without a controller. The basic idea is to program the robot to react in a certain way to external influences. A very simple garage mobile robot is a good example of how this works. This type of robot uses bumper sensors to detect obstacles. When you turn on the robot, it moves straight forward. Finally, collision with an obstacle causes the bumper sensor to collide with the obstacle. With each blow, the robot changes direction according to the program, turns to the right, and then moves forward again. This allows the robot to adjust its path when encountering obstacles. Similar concepts are used in more complex ways by advanced robots. To make robots smarter and more insightful, roboticists are developing new software and sensor technologies. Today, robots can navigate a variety of environments.
IV. LITERATURE SURVEY
Automatic fire extinguisher assembly A robot that can independently detect and extinguish a fire is assembled from several parts. Temperature monitoring sensors, also called optical sensors, visually detect fires, usually within a narrow range, and can be used to record operations at industrial checkpoints in underdeveloped villages to temporarily disperse fires and provide relief to fire-affected areas. Robotic firefighters can be deployed in much less time and could be useful in hazardous environments. In non-combat ground operations, dazzling devices, also known as light scattering devices, often emit optically intense light in a narrow beam to: Temporarily distracts the attacker, drawing their attention to the target and alerting them to dangerous areas. It alerts drivers approaching checkpoints and alerts civilian traffic approaching military bases. Create a manual control device where the robot automatically turns off the lights. These search strategies range from simple and inexpensive, such as IR sensor circuits, to complex and expensive, such as computer vision circuits. You should consider your users' needs when deciding what type of navigation strategy to use. From an industrial perspective, these autonomous firefighting robots are used as fire extinguishing agent delivery devices and act as fire extinguishers in various locations without human intervention. Simple thermostatic sensors are used by autonomous firefighting robots to detect fires, but must provide the correct response range if the robot operates outside of its response range. The main goal of this project is to develop a remote-control firefighting robot. The robot is equipped with a water tank and a radio-controlled pump that sprays water. A PIC microcontroller is used to perform this task. Buttons on the transmitter side are used to send commands to the receiver side to control the robot's movement in one of four directions: forward, backward, right, or left. The advantage is that the decoder decodes the data before feeding it to another microcontroller to control the DC motor through a motor driver IC to perform the required task. With the right antenna, you can have a decent range of up to 100 meters. You are using a remote control. This mobile robot has sensors similar to Arduino. Flame sensors are used to measure the distance between the fire and the sensor. To move the robot, two nylon wheels and ball rollers are used here. Most cars of this type are rear-wheel drive. The water tank contains at least 1 litre of water. Made of durable, waterproof cardboard.
- Swati Deshmukh, Says: The fuzzy controller is responsible for controlling the vehicle's obstacle avoidance ability. The goal is to steer the vehicle away from static objects or obstacles in its path. Vehicles must be able to avoid obstacles in real time when driving through new areas.
- Muhamad Bukhari Al-Mukmin Bin Mohamad Zahar: This instance, a person can control the robot via the GPS module. The GPS module is compatible with the Android application. This GPS model communication software uses an Arduino Mega, voltage divider, motor driver, GPS, and tyres.
- Joe Davis: Three types of system devices are used: GPS, fire detection system, fire extinguishing system 3 and fire extinguishing system 4. communication system. Four ultrasonic range finders are used in conjunction with the GPS system to determine the distance between obstacles and the system. Gasoline sensors are used in fire detection systems to detect fire. The purpose of a fire suppression system is to extinguish a fire.
- William Dubel : Sensors, motor drives, gear motors, relay drivers, GPS modules, pumps and sprinklers were used in this study. Pic microcontrollers must be programmed using the open source Pic Controller IDE software. Fire detection and extinguishing are performed by a Pic microcontroller that connects sensors, gear motors, actuators and relay drives. The 'autonomous solar-powered fire fighting robot' can be easily used in homes, laboratories, parking lots, supermarkets, stores, stores and other institutions. The main mission of the robot is patrol. The robot's downsides are its Bluetooth range and water storage capacity.

Conclusion
In this article we have reviewed many negative or unfavourable scientific works. This configuration shows a fire extinguisher that communicates via Bluetooth and designed using an Arduino controller (MCU). This plan has proven to be beneficial for business and security. Now the robot can only shoot in water at this speed. A camera inside the robot sees the object and controls the robot\'s arms to drain the water. To complete any task. This article describes a firefighting robot with wireless communication capabilities. Arduino controllers (MCUs) are used to build and control robots in the field of embedded systems. The results show that using embedded systems can improve performance. The effectiveness of this plan has been proven from a business and security perspective. Modern robots spray water only at high flow rates. Eventually, robots will be able to recognize objects using cameras and pour water using robotic arms. You can use this as an ongoing project to get everything done.
References
[1] Swati Deshmukh, Karishma Matte and Rashmi Pandhare, \"Wireless Fire Fighting Robot\", International Journal of Emerging Research in Science and Technology, Volume 2, pp. 373-375, March 2015. [2] Muhammad Bukhari Al-Mumin bin Mohamad Zahar, Report of \" Design and Development of Autonomous Fire Fighting Robots\", Mechanical Engineering (Structures and Materials), pp. 1-8, 2011. [3] Joe Davis, Ray Klundt and Paul Limpisathian., Report of “Fire Fighting Robot”, University of Akron, Department of Electrical and Computer Engineering, pp. 1-95, January 25, 2010. [4] William Dubel, Hector Gongora, Kevin Bechtold and Daisy Diaz, Report on “An Autonomous Firefighting Robot”, Department of Electrical and Computer Engineering, Florida International University, Miami, FL 33199. [5] Dr. Wael Abdulmajeed, Dr. Ali Mahdi and Karzan Taqi, “Hose Wireless Fire Fighting Robot (FFR)”, International Journal of Advanced Computer Technology (IJACT), Vol. 2, No. 3, pp. 1- 8. [6] Adil ur Rehman, Dan-Sorin Necsulescu, Jurek Sasiadek, “Robotic Fire Detection in Smart Manufacturing”, IFAC Online Document 48-3, pp. 1640 - 1645, year 2015. [7] Omesh Kumar M, Aditi Sharma and Rashmi Gupta, “Implementing 3600 Rotation of Robot On Its Axis”, International Journal of Computer Applications (0975 - 8887), Vol. 45, No. 17, pp. 20 - 24, May 2012. [8] Sahil Shah, Vaibhav Shah, Prithvish Mamtora and Mohit Hapani, \"Fire Fighting Robots\", On new trends and Technologies in Computer Science, International Journal, Vol. 2, 2013, pp. 232-234, July-August 2013. [9] Gerald Weed, Michael Schumacher, Sean McVey and Jack Lands, Report of \"Pokey Fire Fighting Robot\", pp. 1-66, May 11, 1999.
Copyright
Copyright © 2024 Dr. P. G. Mehar, Ashutosh Sarang Kale, Ajay Prakash Agre, Shreyash Sunil Nagare, Ajay Vasant Shende, Ankit Nandkishor Bure. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET58654
Publish Date : 2024-02-28
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online