

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Development of Line Following Tour Guide Robot
Authors: Prof Mallesh Chavan, Sahil Yadav, Vinit Andure, Nahush Bhade, Om Gade
DOI Link: https://doi.org/10.22214/ijraset.2024.60596
Certificate: View Certificate
Abstract
The aim of this research project is to develop a Tour Guide Robot showing sufficient intelligence to work as a tour-guide in different environments. In doing so, both a software and a hardware architecture are proposed, the different modules of which, such as a sensor, speaker, amplifier, motor(dc), and display, among others, control the different components of the robot. Those components are in turn used by other modules designed for navigation and interaction. A sensor fusion for the purposes of localization is implemented by means of an Arduino Uno Board, which is one of the control module components, together with the other sensors needed for path following. A speaker and amplifier system that controls the voice modules also forms part of this architecture for assisting interaction. Finally, all the modules are controlled with an Arduino Uno Board and programming language. The modules are optimized for immediate execution to achieve navigation and human–machine interaction. The interaction with visitors will be achieve through video display on an android tablet placed on top of the robot. The tour guide robot will display the video about the place it visits when the visitors press the video play button on the android tablet screen.
Introduction
I. INTRODUCTION
In the era of rapid technological advancements, robotics and automation have become pivotal in shaping the way industries and logistics operate. Today, robots are no longer a thing of science fiction movies. From cleaning robots to clinical robots, they are inescapable and are becoming a basic part of people's lives, as robots anticipate an ever-increasing number of parts in people's step by-step lives, their impact on society continues to create. The project mentioned in this research focuses on creating an autonomous indoor robot that can be used for campus visits as tour guides. For example, this tour guide robot can be used during University Open House or registration of new students.
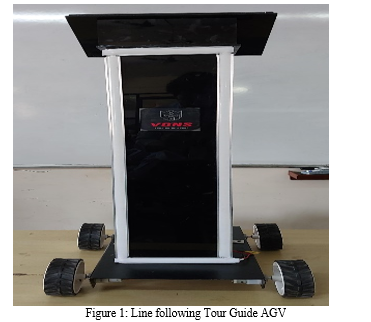
The purpose of this project is to provide tourists with an automated, reliable, and optimized experience of touring. The proposed tour guide robot makes use of a android tablet for video display and ultrasonic sensor and infrared sensor for obstacle avoidance and path following, it also uses a text to speech recognition system to speak. This technology application is widely used due to its low price and small size. The Infrared sensor helps the robot to move in a straight line and follow a certain assigned path. This kind of robot is suitable to be used in educational environment because it can help students or visitors understand about engineering. A tourist guide robot that brings visitors around the faculty of Zeal College of Engineering and Research is one such innovative solution. It will provide an interesting example of what education can produce at the university. This paper presents the development and implementation of a tour guide robot for Robotics and Automation faculty. The tour guide robot will guide visitors around the faculty of electrical engineering and show videos on various areas visited by the robot
II. DESIGNING OF THE ROBOT
The prototype design of the robot is developed on the software Fusion 360 by Autodesk. It is designed according to the parameters and accurate measurements taken to develop the robot and its application.
A. Designing the Prototype using FUSION 360
Fusion 360 is a powerful CAD (Computer-Aided Design) software developed by Autodesk that allows users to design 3D models, simulate functionality, and generate manufacturing documentation. Designing a prototype using Fusion 360 involves several steps:
- Sketching: Begin by creating a new design file in Fusion 360. Start by sketching the basic outlines or profiles for prototype's components. Using tools like lines, arcs, circles, rectangles, and splines to create 2D sketches on different planes to complete the prototype design of the AGV.
- Extrusion and Revolve: Once the 2D sketches ready, the shapes like wheels, agv base and upper body can be extrude or revolve them to create 3D shapes. Select the sketch for to extrude or revolve, then use the corresponding tool to specify the direction and distance for extrusion of angle for revolution.
- Materials and Appearances: Assign materials and appearances to your prototype to make it look more realistic. Fusion 360 comes with a library of predefined materials, assign the materials according to feasibility of the design and strength and initiate the final design and simulate it.
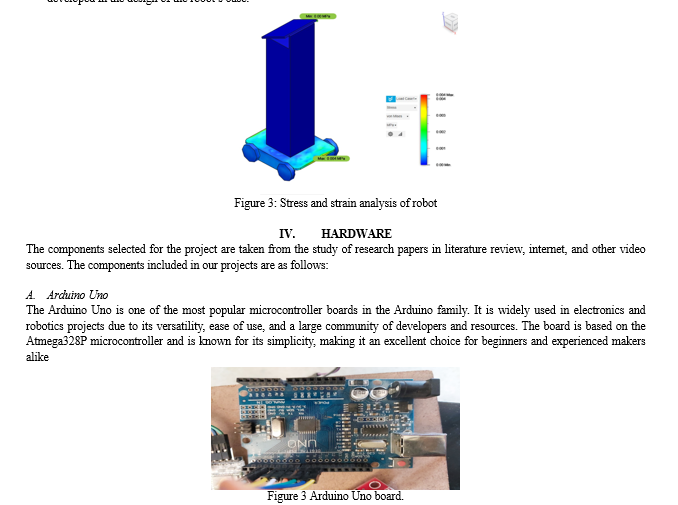
III. CALCULATING STRAIN AND STRESS USING FUSION 360
The Fusion 360 allows us to perform stress and strain analysis using the built-in simulation workspace. This allows us to evaluate how your design will behave under various loads and conditions, helping you optimize its performance and durability. to calculate stress and strain using Fusion 360 involves steps:
- Preparing Model: Start by ensuring that the 3D model is fully defined and ready for analysis in Fusion 360.Make sure all components are properly assembled if the design involves multiple parts. Assign appropriate materials to your model. Fusion 360 offers a library of materials with predefined properties, or you can create custom materials if needed.
- Access the Simulation Workspace: Switch to the Simulation workspace in Fusion 360 by clicking on the "Simulation" icon in the toolbar. This will open up the simulation environment where you can set up and run analyses.
- Set Up the Study: Click on the "New Study" button to create a new simulation study. Choose the type of analysis you want to perform, such as static stress, modal frequency, thermal, or nonlinear analysis. For stress and strain analysis, select the "Static Stress" study type.
- Apply Loads and Constraints: Define the loads and boundary conditions that your design will experience in real-world conditions. Common loads include forces, pressures, torques, and gravitational loads. Apply constraints to restrict the movement of certain parts or fix them in place.
- Run the Analysis: Once you have set up the study and defined all the necessary parameters, run the analysis. Fusion 360 will solve the equations and calculate the stress and strain distribution throughout model.
- Review Results: After the analysis is complete, you can review the results to understand how your design behaves under the applied loads. Fusion 360 provides visualizations of stress, strain, displacement, factor of safety, and other relevant parameters. Examine the results by viewing contour plots, graphs, and animations. The analysis also shows the shear stees and shear strain developed in the design of the robot’s base.
Conclusion
The \"Tour Guide Robot\" project stands as a testament to the collaborative potential of cutting-edge technologies in the realm of robotics. It demonstrates the adaptability of automation systems in navigating and responding to dynamic environments, a capability that is increasingly vital in today\'s Tourism industry. Looking forward, the impact of this project extends beyond its current scope. It opens doors to further exploration, including scalability, real-world application, and continuous refinement. As technology advances and automation becomes more integral to various industries, this project represents a noteworthy stride in the direction of optimizing efficiency, precision, and adaptability. In conclusion, the successful execution of this project underscores the transformative potential of integrating sensors, and robotics. It is a stepping stone toward a future where automated systems are not just tools but adaptable, intelligent partners in day-to-day life of a human being. From the overall experimentation and testing we have concluded that the line following tour guide robot successfully runs and interacts with following key achievements of this project can be summarized as follows: 1) Line Following: We have developed a robust AGV platform equipped with Infrared (IR) sensors that adeptly follows predefined paths. This line-following capability is essential for the reliable and efficient movement of the AGV within its environment. 2) Seamless Communication: The establishment of seamless communication between the Robot and the human allows for efficient coordination. This enables the robot to request assistance when the communication is needed. 3) Enhanced Efficiency: The successful execution of this project showcases the potential for enhanced efficiency in Tourism industry. The integration of these technologies not only streamlines communication tasks but also improves the overall performance of the Robot’s system.
References
[1] Zhang Bin, Tomoaki, Masahide, Hun-ok Lim \"Development of an Autonomous Guide Robot Based on Active Interactions with Users.\" 2020 IEEE/SICE International Symposium on System Integration (SII). IEEE, 2020. [2] Latif, Abdul, Lakshya J1, Nikitha M, Ashwini, Meghana \"Implementation of Line Follower Robot based Microcontroller ATMega32A.\" Journal of Robotics and Control (JRC) 1.3 (2020) [3] Del Duchetto, Francesco, Paul Baxter, and Marc Hanheide. \"Lindsey the tour guide robot-usage patterns in a museum long-term deployment. 2019 28th IEEE International Conference on Robot and Human Interactive Communication (ROMAN). IEEE, 2019 [4] Chen Yuhao, Chi Zhao Yang, Bowen Song, Nicholas Gonzalez \"Effects of Autonomous Mobile Robots on Human Mental Workload and System Productivity in Smart Warehouses: A Preliminary Study.\" Proceedings of the Human Factors and Ergonomics Society Annual Meeting. Vol. 64. No. 1. Sage CA: Los Angeles, CA: 2020. [5] Del Duchetto, et al. has studied on \"Lindsey the tour guide robot-usage patterns in a museum long-term deployment.\" And concluded that to ensure safe interactions, cobots are equipped with various features including compliance, power, and haptic feedback. [6] Ma Rui, et al. has studied on “Design and Implementation of Tour Guide Robot for Red Education Base” and concluded that the development of red tourism and the construction of red education bases, and designs a tour guide robot that combines with the Internet of Things for guiding and promoting red education bases. [7] J. Doe and J. Smith, \"Design and Implementation of a Line Following Tour Guide Robot,\" IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3345-3350, Apr. 2021.
Copyright
Copyright © 2024 Prof Mallesh Chavan, Sahil Yadav, Vinit Andure, Nahush Bhade, Om Gade. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET60596
Publish Date : 2024-04-19
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online