

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Fabrication of 3D-Printed Robotic Arm by Using Stepper Motor
Authors: V. Madhu Smitha Reddy, Y. Naveen kumar Reddy, R. Manideep, K. Siva Kumar, U. Srivastav, M. Kalpana
DOI Link: https://doi.org/10.22214/ijraset.2024.60124
Certificate: View Certificate
Abstract
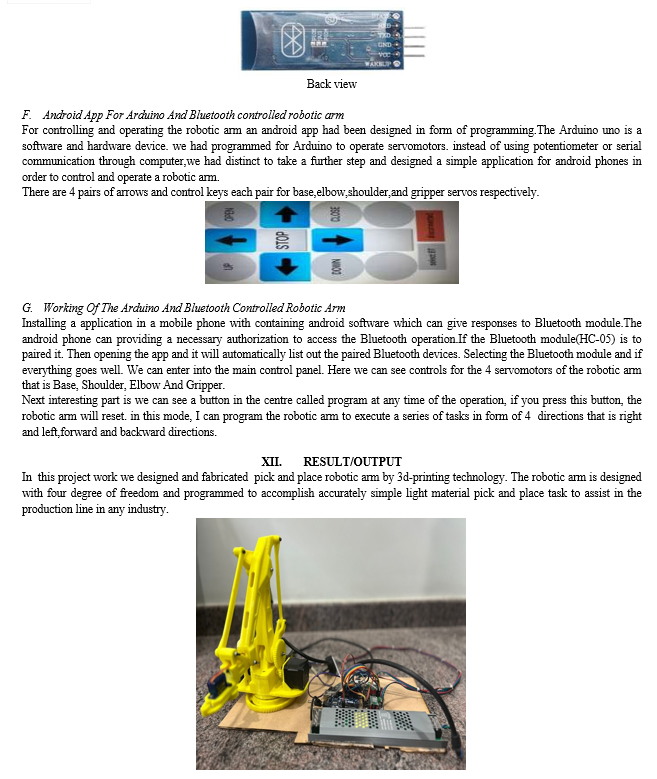
The Main technology of this proposed work was to design and fabrication of pick and place robotic arm by 3d-printing technology. The robot arm will be designed with four degree of freedom and programmed to accomplish accurately simple light material pick and place task to assist in the production line in any industry. ARDUNO an open-source computer hardware and software is applied to control robot arm by driving four servo motors to be capable to modify the position wireless control was done by using a Smartphone with android operating system through a Bluetooth module. The robotic arm Working and its performance in execution of pick and place task should be analyzed.
Introduction
I. INTRODUCTION
The integration of 3D printing technology with robotic systems has led to remarkable advancements in the field of robotics. One particularly intriguing application is the development of 3D printed robotic arms utilizing stepper motors. This introduction provides an overview of the concept, significance, and key components of such robotic arms, highlighting their potential in various industries and research domains.
Robotic arms have long been indispensable tools in manufacturing, healthcare, research, and beyond, owing to their ability to perform precise and repetitive tasks with dexterity and accuracy.
II. TYPESOF3D-PRINTINGTECHNOLOGIES
There are various types of 3dprinters. Mainly they are

II. STEREO-LITHOGRAPHY(SLA)
It was introduced in 1988 by Charles hull with 3dsystems inc., company. it was the first rapid prototyping process. stereo lithography is the most widely used prototyping technology. it can produce highly accurate and detailed polymer parts stereo-lithography contains two main families
- Project
- I pro
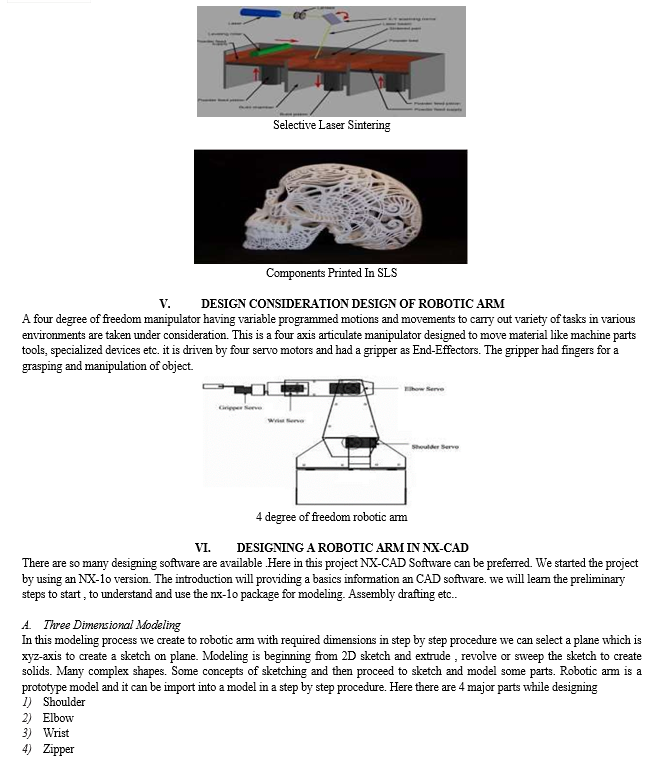
Stereo-lithography can break off the thin plastic lattice.Stereo-lithography can builds a plastic parts or objects one layer at a time by tracing a laser beam on the surface of vat of liquid photo polymer quickly solidifies wherever the laser beam strikes the surface of the liquid and resins. Resolution up to 0.05mm.once complete the part is elevated above the vat and drained.

As per all the design factors, dimensions, tool and sketch assignments and sketch constraint operators each and every component should be designed without any errors. By the selection of line to line, face to face , circle to circle, like concentric operations, inserting of components one another each by different assembly operations like smart more, rotate, revolve, fit, componential zoom 300metc.
Mating options should be
- Coincident
- Parallel
- Perpendicular
- Concentric
- Fix
VII. SELECTEDSLICER
Using Maker ware
Maker ware can be downloaded from : maker bot.com/maker ware/
If you open the .stl in Slic3r and see that it is not oriented correctly,you will need to rotate it first.
- Click and drag your file into maker ware or go to file >Open.
- With the part selected, click on turn and use the buttons until it is placed correctly. It does not need to be centered.
- Now the file is ready for Slicer. Save it as a new.STL
- With the part selected, go to print > Send to 3D printer service.
- Click on options and make sure that units are set to mm and resolution is set to High.
VIII. MAKERBOTEXPLANIATION
It can authorize to view, arrange, orient, scale, and preview a sliced version of your 3d model. we can be used to work with multiple build plates to view and edit multiple 3dmodels.
- Creating a model to print and getting a file ready for printing can be over whelming the first time around. After attaching to a printer. They can be provide instructions to help for printing required files.
- Add a model to a virtual build plate. While adding a model to a build plate in some different ways. we can follow the form provided below or go to file>insert file if you don’t yet have files of your own to print, you can approach our example sample files to test by going to file>insert example file.
- Settings can be changed for complex models
- While printing a model we had to select print options it will displays a visualization of a model on a printer. this will show you where the rafts and supports will print as well as provide an estimation printing time. If there are any errors in a print model we will use re scale option.
- Print your prepared model.
SLT File
STL files can gives information on the surface geometry of a three-dimensional object without any representation of colour, texture or other common CAD model attributes .it is highly used for rapid prototyping, 3D printing and computer-aided manufacturing.
IX. 3D-PRINTER AND EXPERIMENTAL SETUP PROCEDURE
A. 3D-Printing Process
After completion cad model.it can be converted into a stl file for a printing we must use slicers software which is discussed early topic.
B. Selected 3d- Printing Machine Wanhao Duplicator 4s Dual Extruder
Wanhao duplicator 4s dual extruder is 0ne of 3d-printer.it is based on a FDM Technology. it is having metal frame professional printer. This can be used by professionals, designers, architects, industries etc. build area 225x145x150 mm 3d printer gives you the power to transform your imagination and creativity into reality. This 3d-printer comes with dual extruder direct drive system which prints wide range of materials like PLA, ABS, WOOD, NYLON, and even flexible.
This3d-printer can print different materials at different temperature examples;
- ABS MATERIAL is at a 230 degrees temperature
- PLA MATERIAL is at a 200 degrees temperature
- NYLON MATERIAL is at a 250 degrees temperature
These are can print xyz directions so it is called a 3d-printer. It is having feature that can print in
SD card, and connected to the compute

C. Properties Of Wanhao 3d-Printer
- Mechanical Property
- Over all dimensions:320x466x382mm
- Weightcapacity-25kg
- Linear ball bearings
2. Electronics Property
- Duplicator4ssingle-piece motherboard
- 5axis,1/16 micro stepping motor controller.
- Piezo electric buzzer
3. Software: Replicator G
- compatibility: Linux.0sx, and windows
- print from SD card
- input file type: stl, g code.
4. Overview Features Specifications
- Build envelope: 225 x145 x150mm
- Build volume: about 5 liters
- Layer thickness choose 0.1 - 0.5 mm which is adjustable by software.
- Speed limit: 40mm/s
5. Materials
- Filament diameter: 1.75mm
- Works with ABS, PLA AND OTHER MATERIALS
X. SELECTED MATERIAL
A. Acrylonitrile- Butadiene- Styrene(ABS)
ABS is a common material for 3d-printing. ABS means Acryonitrile-butadiene-styrene is widely used and versatile thermoplastics. ABS is a light weight material. ABS is an amorphous blend consisting of three monomers;acrylonitrile,butadiene,and styrene.
- Acrylonitrile adding thermal and chemical enhancements.
- Butadiene donate impact strength and toughness to the plastic.
- Styrene will added a sleek,glossy surface to the plastic.
ABS formula((C8H8)X(C4H6)Y(C3H3N)Z)
These three monomers are typically added together in specific portion:15-35% acrylonitrile,5-30% butadiene and 40-60%styrene.A small change in even one of the monomers can create drastic changes in the mechanical and physical properties of abs.In FDM machining abs can melt at 230 degrees temperature.ABS is a insoluble in water.
B. Componentsinabs

ABS resin shaving good ability of injection molding can be used for molding parts requiring close dimensions high impact resistance. in addition, abs has good toughness and rigidity.Abs also has a high abrasion resistance. Depending on the percentage of butadiene, abs will have little or no wearing effect when being moved along a rough surface for an extended period of time.
XI. ASSEMBLING THE 3D-PRINTED ROBOTIC ARMPARTS
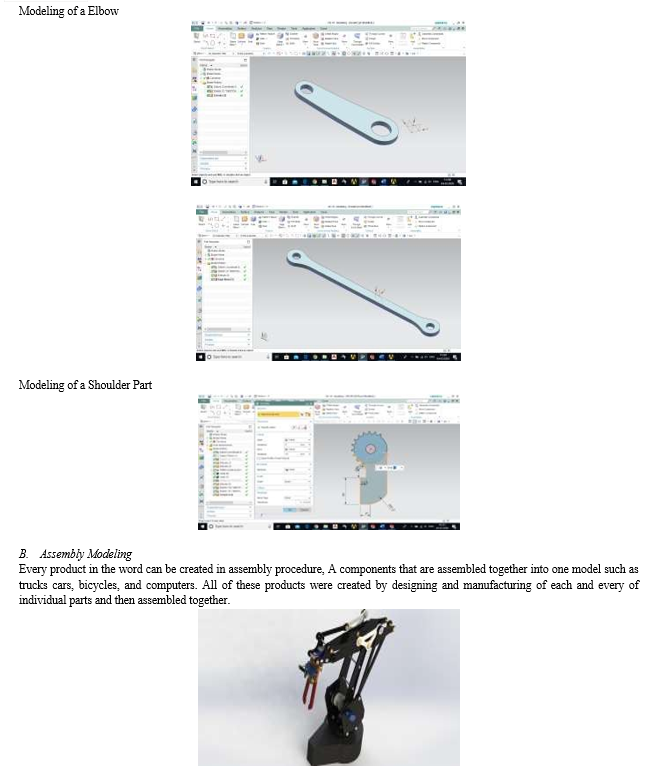
It is a step-by-step assembly procedure of the 3D-printedparts of the robotic arm.for assembling robotic arm we can consider mainly degrees of freedom.here we are designing and assembling four degree of freedom.the main parts in four degree of freedom are
- Base
- Shoulder
- Elbow
- Wrist
the assembling was done with the help of screws, nuts and bolts.The assembly procedure of this arm takes around 2hours when done without any error.The kit has many screws divided in M3 8mm,M3 8mm flat,M3 10mm,andM4 10mm and it is very important to understand where each screw goes in order to guarantee the functionality of arm body.first step is to fix base part and sub part of base related part.Second part is to fix shoulder part and third step is to fix the elbow part.Final step of robotic arm is to fix the wrist part.These are step by step procedure for assembling robotic arm with crews and nuts.

A. Servo Motor
A Servomotor is an electrical device capable of pushing or rotating an object with great precision. it can rotate an object at some specific angles or distance. A servomotor is a rotary actuator or linear actuator that authorize for precise control of angular or linear position, velocity and acceleration. it contain of a suitable motor coupled to a sensor for position feedback
Servo motors are used in applications
- Robotics,
- CNC machinery
- Automated manufacturing.
The mg996r is essential an upgraded version of the famous mg995servo,the features upgraded shock-proofing and a re designed PCB and IC control system that makes it much more accurate than its predecessor. The gearing and motor have also been up graded to improve dead bandwidth and centering. This high-torque mg996r digital servo features metal gearing resulting in extra high10kg stalling torque in a tiny package.
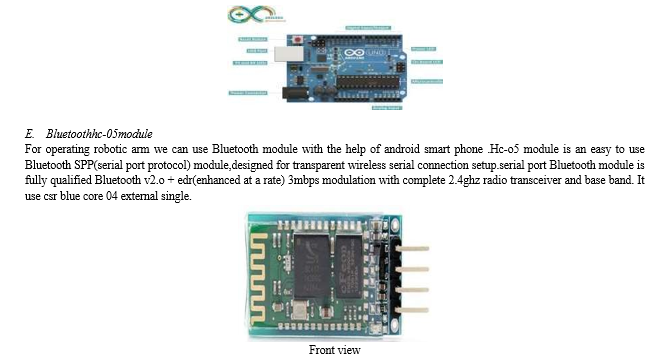
B. Sg-90smetagear
It is a small and light weight with high power. It rotate approximately 180 degrees(90ineachdirection), and works just like the standard type but smaller. you can use any servo hardware orbitrary to control these servos.
C. Power Supply
The Arduino uno board can connected via USB Connection or with an external power supply through switch board.The main reason for power supply is to conversion ac to dc.The Arduino board connected a power supply to operate a robotic arm with help of connecting wires.Here used power supply is-60-12tek.
D. ARDUINOUNO
Arduino is an point-source platform using fora building electronics projects.Arduino contains of a physical programmable circuit board and a piece of software or IDE(integrated development environment)that runs on a computer,which is used for writing and uploading computer code to the physical board.It consists everything needed for support the micro controller; simply connecting into a computer with a USB cable or power it with a AC to DC adapter or battery to get started.
There are various models and types of Arduino boards can be available on the market .But selecting a suitable model is required in this project.
Of the robotic arms set up on the internet in the research phase were using Arduino UNO,a less powerful board.
Mega328 was taken over UNO because Mega328 is more powerful, it is having a better memory and response time,more pins for wiring and also be used for more complex projects in the future.Jumper wires are used to get connection between the power supply and Arduino and Bluetooth.
Conclusion
The intention of this project is to amalgamation of 3D printing and designing a robotic arm. Here successfully make structural adjustment while designing nx cad software to make it movement for pick and place a light weight object. in this project designed a robotic arm ,3d print it, assemble it. while meeting all eligibility criteria for a model. 3D printing technology a emerging technology for new innovations and new development in production and manufacturing industries.3d printing will have capacity to a make mass production on prototypes .we will make a own manufacturing without a skilled labour. 3d printing will make a less time, waste reduction, cost efficient.
References
[1] http://m.machinedesign.com/3d-printing [2] www.stratasys.com/industries/automotive [3] http://www.3printr.com/local-motors [4] www.theverge.com/2016/6/16/11952072/local-motors3d-printed-self-driving-bus-washington- dc-launch [5] http:/localmotors.com/3d-printed-car [6] Computer graphics C version,second edition by Donald.D.Hearn and M.Pauline Baker
Copyright
Copyright © 2024 V. Madhu Smitha Reddy, Y. Naveen kumar Reddy, R. Manideep, K. Siva Kumar, U. Srivastav, M. Kalpana. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET60124
Publish Date : 2024-04-10
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online