

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Fabrication of Exoskeleton Arm for Lifting Weight
Authors: Prajwal L Athrey, Naveen Raj RS, Jithesh MP, Rohan BK
DOI Link: https://doi.org/10.22214/ijraset.2022.45127
Certificate: View Certificate
Abstract
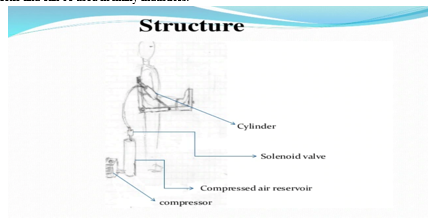
For centuries now, humans have developed machines for tasks which are too labour intensive for species cannot do. So, creative imagination and subtle engineering has led to the development of the powered exoskeleton. It is a device which can be worn over the human body. The robotic exoskeleton systems are developed significantly to be used for human power assist and haptic interaction with human Motion. The designed pneumatic arm consists of cylinders, a shaft efforts with lead screw mechanism able of converting a movement of piston to rotational movement of arm by utilizing the compressed air from pneumatic system. The designed processes of the suit is carried out based on some integrated information of kinematic, dynamics and structural analysis of the desired exoskeleton configuration as a whole. Since, such exoskeleton directly interacts with a human body there are some mechanical limitations to its design. While designing such exoskeleton movable range of arms, safety and comfort Wearing, low inertia, adaptability are considered.
Introduction
I. INTRODUCTION
A powered exoskeleton, also known as powered armor, exoframe or exosuit, is a mobile machine consisting primarily of an outer framework worn by a person and powered by a system of motors, hydraulics, pneumatics or levers that delivers at least part of the energy for limb movement.
The main objective is to reduce human effort while lifting the weight.Other than just lifting weights these mechanical frames have much more applications and can be used in many industries.
II. PROBLEM STATEMENT
During study of our project, we got acknowledged various scenarios where, in industries human efforts were being put in pick and place of loads, which of course results in less productivity from humans and many other risky jobs. So our main objective to achieve through this project is to reduce the human effort by some sort of mobile device for assisting human power. Issues such as:
- Additional strength
- Protection support
- Dangerous/tiring jobs
- Lifting heavy obstacles
etc could reduce the risk and efforts of humans and also through the usage of these mobile devices productivity and efficiency of the industries can be increased.
III. OBJECTIVES
- The main objective is that the most common activity humans perform, be it a soldier or an industrial worker or a rural woman, is weight lifting and that is what we aim to target. The idea is to make an exoskeleton which will help human beings lift heavy weights without feeling any load/stress on the human muscle.
- Other than that,this mechanical in a robot ,enables disabled people to select this mechanism.
- Fabricate a joint capable to be able to provide pick and place movement of arms without any damage to arms.
- To utilize the pressure from compressors in efficient manner
- Fabricate cost effective exoskeleton and also develop general idea and thought process behind exosuits.
IV. SCOPE
A. Study all possible joints involved in designing exoskeleton.
B. Study pneumatic system mechanisms.
C. Study fabrication of safer devices and also human safety in designing mechanisms.
D. In this present competitive world there is huge scarcity of man power, so there must be an alternative to reduce this problem. Even in industrial application it requires more human resources for daily work and load carrying process is more. All these above work cannot be done by humans. To overcome this situation pneumatic exoskeleton system is adopted to ease the work and minimize stress of prime area for exoskeleton technology, where it can be used for enhanced precision during surgery or as an assist to allow nurses to move heavy patients.
V. WORKING
The industrial exoskeleton sector is generally the most active today since wearables for the support of upper extremities are becoming so common in the construction industry as well as manufacturing. The main goal for industrial exoskeletons isn’t to give workers super strength” or anything of that sort but rather to prevent workplace injuries. Strain due to overexertion and injuries caused by repetitive tasks are some of the most common culprits behind lost productivity in industrial settings. Of course, physical stress caused by worker fatigue also leads to lost time and makes injuries more likely to occur. Industrial exoskeletons seek to decrease fatigue, support muscle activity, support joints, and reduce discomfort while performing repetitive overhead work to increase occupational safety.
- The DC motor with specifications to lift the desired load is selected and is programmed to lift the load till a certain degree.
- There are two DC motors, one is connected to the elbow joint, and the other connected to wrist joint.
- The working of the project is very simple. An app is used to control the arm movement which consists of control options, for forward and reverse direction of the motor.
- If the forward direction is pressed, the arduino drives input 1 of motor driver. Hence the motor starts rotating in forward direction.
- Similarly, if the reverse direction switch is pressed Arduino drives input 2 the motor starts rotating in reverse direction.
VI. OUTCOMES OF THE PROJECT
- The integration of human and automation into a single system offers remarkable opportunities for a new generation of assistive technology.
- The design of an exoskeleton, which is physically linked to the human body, must have a workspace that matches as close as possible with the workspace of the human body, while at the same time avoid singular configurations of the exoskeleton within the human workspace.
- Usage of electric motors for small scale applications can reduce the dependency on hydraulic and pneumatic systems, thereby making the device portable and economical.
Copyright
Copyright © 2022 Prajwal L Athrey, Naveen Raj RS, Jithesh MP, Rohan BK. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET45127
Publish Date : 2022-06-30
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online