

Ijraset Journal For Research in Applied Science and Engineering Technology
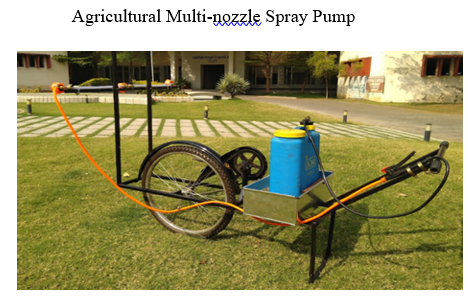
Design and Fabrication of Trolley Operated Agricultural Multi-nozzle Spray Pump
Authors: Dr. Pankaj Gajbhiye, Narayan Shastri, Aman Sashastrabuddhe, Jay Wahane, Shrohil Sangodkar, Vaibhav Gongale, Vaibhav Titarmare
DOI Link: https://doi.org/10.22214/ijraset.2022.41375
Certificate: View Certificate
Abstract
Insects are largely responsible for the crop destruction. To tackle this problems man-made insecticides and pesticides are sprayed over the plants in farms which kill the existing pests and avoids their reproduction. Mechanical equipments called sprayers are used in spraying processes. The most commonly used sprayer type is knapsack sprayer. The existing sprayers has certain drawbacks like In conventional type pesticide sprayer, the heavy tank containing pesticide is carried by the farmer on his back and requires a lot of human efforts for spraying. For effecient spraying of the pesticide operator has to hold the nozzle properly in the desired direction. Another type sprayer is fuel operated and requires expensive fuel i.e. Diesel or petrol. Thus the load on back of the farmer increases causes health issues. Such problems can be overcome by manually operated multi-nozzle sprayer as discussed in this project.
Introduction
I. INTRODUCTION
Today, India is having the 2nd highest crop output in the world. According to a report released by the Ministry of Agriculture and Farmer Welfare, Govt. Of India & a study by National Statistical Office (NSO) and Ministry of Statistics and Program implementation (dated on 31st May 2021) the share of agriculture and it's allied sectors in Indian economy is 20.2% which is greater as compared to last two financial years. Where it was 18.4% in 2019-20 & 17.6% in 2019-18.
There are mainly 9 types of farming practiced in India :
- Shifting Agriculture
- Subsistence Agriculture:
- Intensive Farming
- Extensive Farming:
- Plantation Agriculture
- Commercial Agriculture
- Dry Land Farming
- Wet Land Farming
a. Kharif
b. Rabi
c. Zaid
9. Terrace Agriculture
Whereas the classification of farmers on the basis of land size is done as follows:
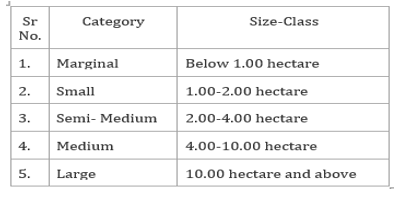
As per the results (provisional) of latest Agriculture Census 2015-16, the State-wise average size of operational holdings in the country is less than 2 hectares except some states which indicates that most of the farmers in India 1.08 hectares of land for farming.
And hence, the market of farm related equipments and products (Fertilizers, Insecticides, Pesticides, etc.) is humongous.
These pesticides are sprayed all over the farm by conventional methods like using a hand operated sprayer or motor sprayer, etc.
The average time required to spray pesticide over a plant is approximately 8-20 seconds depending upon the type plant. Which is causing back pain and other health related issues to the farmers due to constant exposure to the pesticides. Also the time reuired to cover a certain area as well as cost of labour increases. There are some efforts taken by some individuals in this case but most of them either are not feasible or are beyond the farmer's reach.
With technological advancements drones especially 'Hexacopters' are also being used to do the same work in some areas. With a capacity of maximum 10 kgs they are an alternative to the conventional spraying techniques but their initial installation and the maintainance cost is not affordable to small scale and marginal farmers. Also their functioning requires a high level of skills. So for the time being it would not be a solution of this problem.
This is our attempt to solve this issue by using our knowlege and skills to build a solution for this problem.
II. LITERATURE REVIEW
A. A research paper by R.D. Dhete has been analysed for reviewing the researchwork on different types methods of spraying techniques.
B. Different Spraying mechanisms were studied from literature published by massey university Newzealand.
C. The calculationsfor design work were studied from “Mannually operated Multi-nozzle sprayer” by Rushikesh Ghadge Savitribai Phule Pune University.
???????III. CONSTRUCTION
A. Design Factors
The creating the Design of this project the factors that were taken into consideration as follows :
- The machine should have better durability as it should be workable in soil conditions of farm.
- It should be light weight and easy to handle also.
- The machine must be portable and less space consuming as it may be required to be transported to farm from the other places.
- The height for the sprayer mechanism should be adjustable for different crops.
- The overall manufacturing and maintainance cost of the mechanism should be low.
B. Materials used
Taking the above mentioned factors into consideration, the materials selection was carried out.
- Mild Steel (MS): Due it’s cost effectiveness and properties like high ductility, weldability, high impact strength the mild steel is selected for the fabrication of frame and adjustable bars.
- Stainless Steel (SS): The Wheel of the machine is going to have a contact with wet soil as well as different types of roads upto farm. The material of the wheel frame should be less corrosive and light weight in nature and at the same time it should not plastically deform due to any sudden impact as well as it should be able to bear the weight of the machine.
- Plastic: Plastic tank and sprayer nozzles are used to reduce the weight and as plastic is corrision resistant and relatively affordable.
- Rubber: Rubber is the material selected for the pipe as it can be easily attached ,replaced and is flexible which makes it convenient to adjust the height of the sprayer nozzle bar. The handle grips are also rubber made.
- Brass: Brass connectors are used in fitting of the pipes as they have great corrosion resistance.
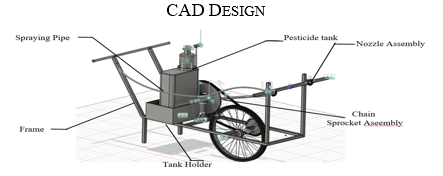
(CAD Design of frame and mechanism of machine)
|
Sr. No. |
Name of Component |
Dimensions |
Material |
|
1. |
Frame |
609.60 mm x 1176.43 mm x 368.15 mm |
Mild Steel |
|
2. |
Wheel |
D = 650 mm |
Stainless steel |
|
3. |
Tank |
500 mm x 20 mm x 160 mm |
plastic |
|
4. |
Tank Holder |
500 mm x 265 mm x 160 mm |
Tin |
|
5. |
Adjustible Bar |
930 mm |
Mild Steel |
|
6. |
Pipes |
1200 mm |
Rubber |
|
7. |
Nozzle |
OD = 32.5mm |
Plastic & Rubber |
|
8. |
Sprocket 1 (Driver) |
T1 = 18 |
AISI 304 |
|
9 |
Sprocket 2 (Driven) |
T2 = 43 |
Stainless Steel |
|
10. |
Chain |
875 mm |
AISI 304 |
|
11. |
Slider Rod |
800 mm |
Mild Steel |
|
12. |
Connecting Rod |
480 mm |
Mild Steel |
C. Working
The operator grabs the handle and pushes the trolley forward.
- As trolley moves forward, the wheel rotates in anti-clockwise direction.
- As sprocket is mounted on same shaft of wheel, it also rotates in anticlockwise direction.
- This motion is transferred to crank via chain drive arrangement and crank rotates anticlockwise as well.
- The driven sprocket is connected to a slider mechanism, which is further connected to the reciprocating rod of the piston.
- This will reciprocate the piston via connecting rod and builds up the pressure.
- During the upward motion of the connecting rod the pesticide is drawn into the pump and during the downward motion of connecting rod the pesticide is forced to the delivery valve, the delivery is connected to the pipe carrying the number of nozzles
- The operator would need to press the hand operated lever mechanism to start the spraying.
- Thus the pesticide is sprayed.
- Height and angle of the nozzle bar can be adjusted by screw locking, which can be done manually
???????IV. CALCULATIONS
A. Frame Calculations
weight of Tank (After Filling Water ) = 4.3kg*9.8 = 42.14 N
Frame is made of 21.7mm x 21.7mm Mild Steel bars of thickness 1.5 mm which can be easily welded. It will take the weight of the tank easily. Rest of the frame was designed considering the requirements for its strength, stability and ergonomics.
B. Calculations for Wheel
Wheel Diameter = 26 inches = 650 mm
No. of teeth in Driver sprocket = 18
No. of teeth in Driven sprocket = 43
Velocity Ratio (VR) = Number of teeth On Driver Sprocket Number of teeth On Driven Sprocket
=43/18 = 2.388
Distance Travelled by wheel in 1 rotation = circumference of wheel
C= π x d = π x 650 =2042.04 mm
C= 2042.04/1000 = 2.04 m
∴ distance travelled in 1 rotation of the wheel is 2042.04mm or 2.04m
Chain Length =875 mm , No. of links = 82
C. Output Calculations
(Output varies accordingly as land conditions change)
Avg, Distance between two plants is approx. 30 - 35 cms
let us consider, D = 35 cm = 350 mm,
∴ No. of plants covered in one rotation= (2042.04/350) x 2
= 5.834 x 2 = 11.668 ≈ 12 plants per cycle
Time taken to complete one rotation is 5 second.
∴ Plants covered in 1 min is 144.
Time taken in conventional spraying over a plant is 4 seconds.
∴ In 1 min only 15 plants can be covered manually.
∴ the sprayer machine covers almost 10 times more plants as compared to conventional spraying method.
(Note - Some calculations of non customized components are as per standards)
???????V. Advantages
- It is convenient to transport from one place to another.
- No use of fossil fuel or any other external source of energy.
- Reduces human fatigue and effort during spray and decrease the time of spraying the pesticides.
- Less manufacturing and maintenance cost.
- Multiple nozzles which cover maximum area of spraying in minimum time and at maximum rate.
- Pesticides can be sprayed on small as well as tall plants.
- Does not require to buy any Specially Designed Pump (conventional knapsack pump can be directly used here)
- Portable & Ergonomic
- It is Eco-friendly. Much more efficient and easily affordable than any other spraying machine for small scale farmers.
- Proper adjustment facility in the model with respect to the height crop helps to avoid excessive use of pesticides which result into less pollution. .
- This alone pump can used for multiple crops.We can spray up to height by using adjustable nozzle
Conclusion
A. The ‘Manually Operated Multi-Nozzle Sprayer’ using the ‘Crank-Slider Mechanism’ is much better as compared to the other different type of options available. B. It is completely manual as no external power sources are in its operation. Moreover, the materials and components used are easi;y available as well as affordable. C. The main problem being faced by the farmer is to carry the entire load of the pesticide tank on his shoulder and this problem can be very efficiently solved by the adoption of this method. D. The efforts required by the operator are very less on the real-situation fields. Also, no special skills or training is required for the farmer (operator) to operate it. E. The operator can cover large area without any additional energy by using the manually operated machine for a spraying purpose, by converting its rotational motion from wheel into reciprocating motion of piston, and also reducing efforts of the operator.
References
[1] DEVELOPMENT AND FABRICATION OF SMART SPRAY PUMP 1Mahesh M. Bhalerao ,2Azfar M. Khan , 3Dattu T. Unde , 4Amitkumar S. Yadav 5 Prof. Atul D. Dhale, 6 Prof. R.G.Deshmukh 1,2,3,4,Student Of B.E. Mechanical 5Associate Prof. & HOD Of Mechanical Department 6Associate Prof. Of Mechanical Department Shivajirao S. Jondhale College Of Engineering, Dombivli (E), Mumbai University [2] Fabrication of Portable Foot Operated Agricultural Fertilizers and Pesticides Spraying Pump S R Kulkarni1 , R V Nyamagoud2, Hareesh Naik3 , Mohan Futane4 1,2,3,4 Department of Mechanical Engineering, Hirasugar Institute of Technology, Nidasoshi Belagavi-591236, Karnataka, India [3] Fabrication of Portable Foot Operated Agricultural Fertilizers and Pesticides Spraying Pump S R Kulkarni1 , R V Nyamagoud2, Hareesh Naik3 , Mohan Futane4 1,2,3,4 Department of Mechanical Engineering, Hirasugar Institute of Technology, Nidasoshi Belagavi-591236, Karnataka, India [4] Agricultural Fertilizers and Pesticides Sprayers - A Review- Nitish Das, Namit Maske, Vinayak Khawas, Dr. S. K. Chaudhary, R. D. Dhete, sDepartment of Mechanical Engineering K.D.K College of Engineering
Copyright
Copyright © 2022 Dr. Pankaj Gajbhiye, Narayan Shastri, Aman Sashastrabuddhe, Jay Wahane, Shrohil Sangodkar, Vaibhav Gongale, Vaibhav Titarmare. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET41375
Publish Date : 2022-04-11
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online