

Ijraset Journal For Research in Applied Science and Engineering Technology
Design & Fabrication of Vertical Surface Cleaner
Authors: Sairaj Khosare, Anurag Dhame, Ayush Parate, Shankar Misal, Abhinay Dube, Prof. A.V. Dube
DOI Link: https://doi.org/10.22214/ijraset.2024.62371
Certificate: View Certificate
Abstract
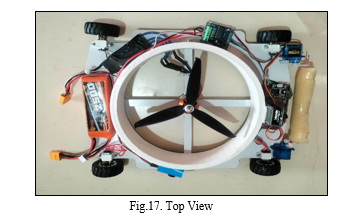
The Wall Climbing Robot designed in this study to combines the innovative propulsion system of propellers with the traditional locomotion method of wheels to achieve versatile and efficient mobility on both vertical and horizontal surfaces. By integrating propellers and wheels, the robot can seamlessly transition between climbing walls and moving along flat surfaces. The hybrid design not only enhances the robot\'s mobility but also optimizes its energy efficiency, making it suitable for prolonged missions in various environments. This research explores the synergistic integration of propellers and wheels, showcasing the robot\'s adaptability in real- world applications such as surveillance, inspection, and maintenance tasks in both indoor and outdoor scenarios. The developed Wall Climbing Robot presents a significant advancement in robotic mobility, offering a promising solution for complex tasks in diverse settings
Introduction
I. INTRODUCTION
The field of robotics continues to push boundaries, embracing new challenges and technologies to develop versatile and adaptable machines capable of overcoming various obstacles. Wall climbing robots, in particular, have garnered significant attention due to their potential applications in inspection, maintenance, and surveillance tasks within complex environments. This study introduces a novel approach to designing a wall climbing robot, leveraging a simplistic wheeled chassis and an innovative propeller-based thrust mechanism to enable the robot to ascend vertical surfaces.
Traditional wall-climbing robots have often relied on complex mechanisms and intricate designs, which can impede their mobility and increase their energy consumption. In contrast, the proposed approach aims to simplify the robot's structure while maintaining its effectiveness in climbing walls. The integration of a wheeled chassis provides stability and enhances maneuverability, allowing the robot to traverse diverse terrains effectively. The introduction of a propeller-based thrust mechanism offers an efficient solution for generating the necessary force to facilitate climbing.
In the realm of advanced cleaning solutions, the Vertical Surface Cleaner stands as a cutting-edge innovation, designed to address the challenges of maintaining vertical surfaces such as walls, windows, and facades. This project aims to revolutionize the cleaning process by integrating a high-resolution camera, enhancing both functionality and efficiency.
II. LITERATURE SURVEY
The paper discusses the design and fabrication of a quadruped climbing robot capable of ascending vertical surfaces. The robot utilizes a suction mechanism for wall adhesion and is controlled using Basic Stamp[1]. Climbing robots are being developed to address a wide spectrum of applications, spanning from cleaning to inspecting challenging structures[2]. The paper outlines the steps for an optimization experiment using the Taguchi methodology to enhance vacuum pressure, a pivotal factor in augmenting suction force[3].
In this paper introduces an innovative quadruped mechanism, seamlessly integrating a four-bar and slider-crank mechanism with a vacuum adhesion module[4]. This paper introduces a wall-climbing robot that employs a semi-static movement approach[5]. Following study is dedicated to the development of a wall climbing robot with a focus on non-destructive inspections of various building structures[6]. The given project primarily addresses performance evaluation challenges in industrial applications, particularly within the piping sector. The core focus is the integration of robotics and magnetic technologies, utilizing permanent magnetic tracks[7] Climbing robots have found extensive utility in inspecting smooth walls; however, devising an effective adhesion method for inspecting cliff surfaces and dusty, high-altitude terrains with minimal vibration[8]
In this paper uses sensing approach relies on tactile and ultrasonic sensing, enabling it to adapt to uncertain environments. The robot's intelligence is further enhanced through a set of reflexive rules [12]. Conventional wall-climbing robots predominantly rely on rigid actuators, such as electric motors, leaving a gap for the realization of soft wall-climbing robots driven by muscle-like actuators [13] Concrete structures, such as bridges or viaducts, hold significant importance in global road infrastructure, though they are susceptible to external factors that lead to structural deterioration over time [14].
The goal of the robot is to do inspections in industrial environments where climbing walls is essential for efficient examination The report will most likely include details about the robot's design, capabilities, wall climbing methods, visual inspection, GPR technology integration[15] It discusses their design, mechanisms, applications, and difficulties. Based on design variants, movement strategies, sensors, and application domains, the article categorizes and assesses existing robots [16]. The study is on a small flying robot designed to climb walls. The paper discusses the mechanism's design and operation, emphasizing its aerial capabilities and climbing functionality [17]
III. OBJECTIVE
- Design and fabricate a robot that can climb and clean the vertical surface
- Build the robot in lowest cost
- Lighter robot than robot available in the market
- It also used as an inspection purpose
- Construct a multifunctional robot clean glass and solar panel also
- Build a specialized Cleaning mechanism that uses less force to oppose thrust force, since thrust force is mostly what keeps the robot attached to the wall
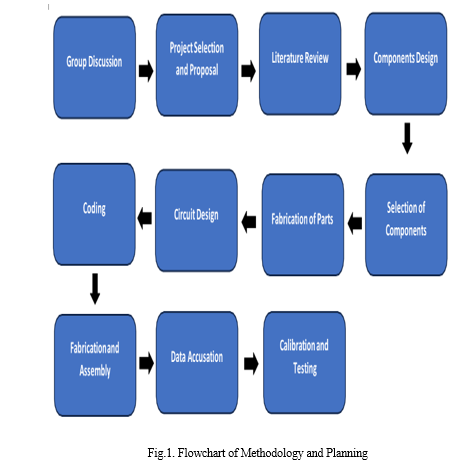
IV. METHODOLOGY
A. Methodology and Planning
Following are schematics showing the methodology and planning used to approach the design and manufacture of the final product
Conclusion
Our goal with this project was to create a basic, inexpensive robot that could climb walls as well on horizontal surface. Compared to other wall climbing techniques, the propeller thrust method is relatively easy to develop and reasonably priced. A highly exact calculation is made throughout the climbing process to ensure that there is sufficient thrust to hold the robot\'s entire body to the vertical surface. Determining the friction coefficient (µs) in static condition of the robot\'s rubber wheels on the white board was a crucial computational step. It was determined using an experimental process. Another essential component is the robot\'s programming code. If this isn\'t done as accurately as feasible, the robot won\'t function as intended. The Cleaning mechanism is a specially built mechanism created just for this robot. The stress and deformation of the chassis are also calculated separately. This is a crucial step since the results of the computation directly affect the choice of chassis material. In order to keep this robot stable and operating smoothly, the overall weight distribution as well as the component setups and their placements are crucial. This project is still in its early phases, nevertheless. It is possible to increase the robot\'s capabilities and optimize its efficiency through more research and development. And the robot is also act as a surveilling purpose
References
[1] Albagul, A., A. Asseni, and O. Khalifa. \"Wall climbing robot: mechanical design and implementation.\" Recent Advances in Circuits, Systems, Signal and Telecommunications 1, no. 1 (2011). [2] Bilal, Hafiz Muhammad. \"Design and Development of a Wall Climbing Robot.\" arXiv preprint arXiv:2301.05882 (2023). [3] Kim, Hwang, Dongmok Kim, Hojoon Yang, Kyouhee Lee, Kunchan Seo, Doyoung Chang, and Jongwon Kim. \"Development of a wallclimbing robot using a tracked wheel mechanism.\" Journal of mechanical science and technology 22 (2008): 1490-1498. [4] Deshpande, Shrinath, Amol Bakse, Shivaraj Wabale, Arvind Deshmukh, and Digvijay Patil. \"Wall-climbing robot with mechanically synchronized gait.\" In 2015 International Conference on Industrial Instrumentation and Control (ICIC), [5] Wall Climbing Robot Pranav Kakade1 , Umesh Padatari2 ,Vinayak Sorgavi3 ,Vishwanath Patil4 , Dr.S.A.Alur5 ,Dr.Rajendra M Galagali: [6] Design of Wall Climbing Robot for Surface Crack Detection Using Image Processing Jeseera V P1 , Rakesh Reghunath2: [7] Chabukswar, Mansi S., Ravikant K. Nanwatkar, and Aparna M. Bagde. \"Design and Experimental Analysis of Magnetic Climbing Robot.\" International Journal of Research in Engineering, Science and Management 2, no. 12 (2019). [8] Xu, Fengyu, Jingjin Shen, JinLong Hu, and GuoPing Jiang. \"A rough concrete wall- climbing robot based on grasping claws: Mechanical design, analysis and laboratory experiments.\" International Journal of Advanced Robotic Systems 13, no. 5 (2016): 1729881416666777. [8] Sattar, T., and H. E. Leon-Rodriguez. \"Development of Climbing Robots with Different Types of Adhesion.\" In 24th ISPE International Conference on CAD/CAM, Robotics and Factories of the Future (CARS & FOF). 2008. [9] Panich, Surachai. \"Development of a wall climbing robot.\" Journal of Computer Science 6, no. 10 (2010): 1185. [10] Ramu, g. \"a novel method of wall climbing robot with passive suction cups.\" middle east journal of scientific research 19, no. 7 (2014): 944-947. [11] Luk, Bing L., David S. Cooke, Stuart Galt, Arthur A. Collie, and Sheng Chen. \"Intelligent legged climbing service robot for remote maintenance applications in hazardous environments.\" Robotics and Autonomous Systems 53, no. 2 (2005): 142-152. [12] Gu, Guoying, Jiang Zou, Ruike Zhao, Xuanhe Zhao, and Xiangyang Zhu. \"Soft wall-climbing robots.\" Science Robotics 3, no. 25 (2018): eaat2874. [13] Boži?, Matej, Branimir ?aran, Marko Švaco, Bojan Jerbi?, and Marijana Serdar. \"Mobile Wall-Climbing Robot for NDT inspection of vertical concrete structures.\" [14] Yangí, Liang, Guoyong Yang, Zhaoming Liu, Yong Chang, Biao Jiang, Youssef Awad, and Jizhong Xiao. \"Wall-climbing robot for visual and GPR inspection.\" In 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), pp. 1004-1009. IEEE, 2018. [15] Jose, J. A. I. S. E., Dinakaran, D., Ramya, M. M., & Harris, D. G. (2018). A survey on magnetic wall-climbing robots for inspection. Transst. J, 8, 59-68. [16] Shin, J. U., Kim, D., Kim, J. H., & Myung, H. (2013, August). Micro aerial vehicle type wall-climbing robot mechanism. In 2013 IEEE ROMAN (pp. 722- 725). IEEE.
Copyright
Copyright © 2024 Sairaj Khosare, Anurag Dhame, Ayush Parate, Shankar Misal, Abhinay Dube, Prof. A.V. Dube. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET62371
Publish Date : 2024-05-19
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online