

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Optimization of Rear Wheel Assembly in All-Terrain Vehicle
Authors: Subramanian M, Rahul V, Dr. Ayyappan P R
DOI Link: https://doi.org/10.22214/ijraset.2024.59363
Certificate: View Certificate
Abstract
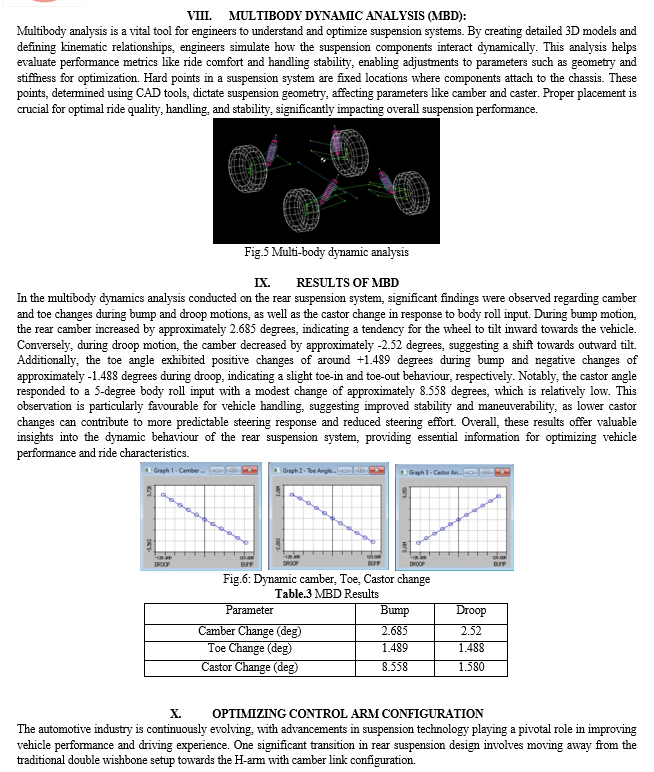
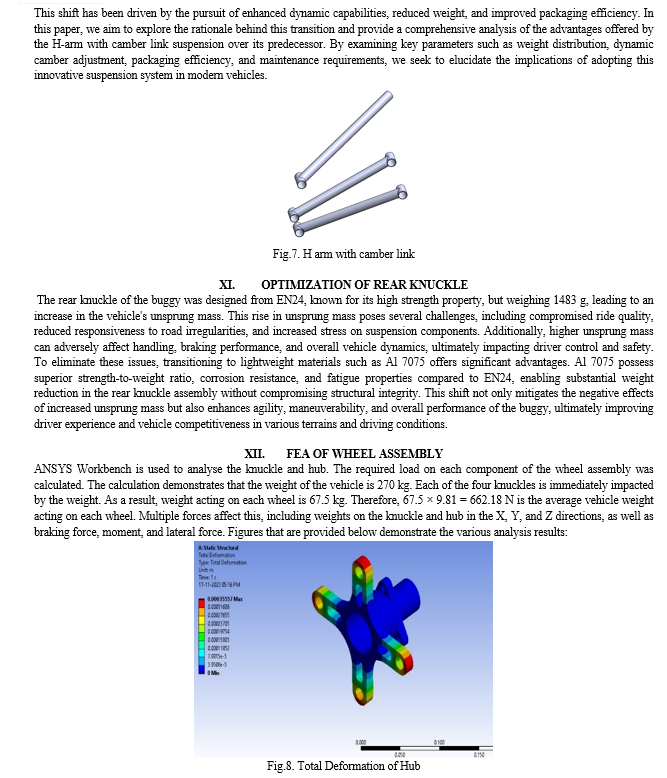
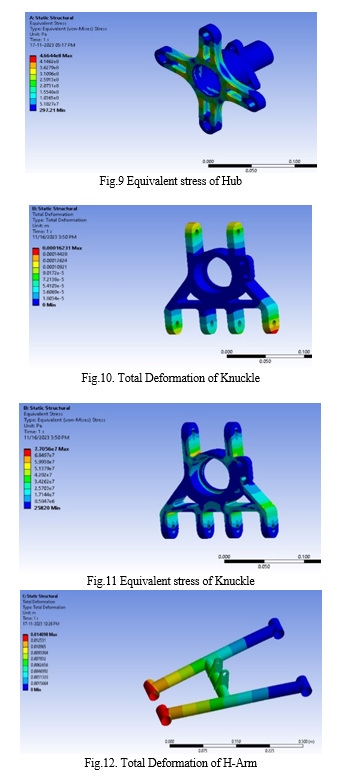
Suspension is one of the automobile\'s critical subsystems. Isolating the driver from the shocks of the road is the ultimate purpose. The need of sufficient wheel travel, lateral stability, load transmission, and driver comfort are elements of secondary functions. The study details the design and improvement of an ATV\'s braking and rear wheel suspension systems. The vehicle was designed under the terms of rules framed by the SAE Organization. The suspension provides the most effective achievable camber, caster, toe, anti-dive, Roll Center, and improvements since it is made for tough terrain. Additionally, there are also calculations, mounting considerations, and shock absorber presented. A prime instance of a commercial software package that studies suspension geometry is Lotus Shark. With the commercial program ANSYS WOKRBENCH, different suspension components are subjected to finite element analysis. All knuckle tests were performed on aluminium alloys 7075 and Hub EN24.
Introduction
I. INTRODUCTION
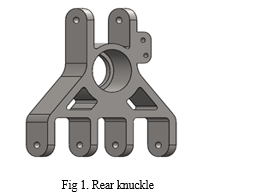
The SAEINDIA-organized BAJA event is designed for all-terrain vehicles. Simulating real-world engineering design tasks and the difficulties that entail is the competition's aim. Each team's goal is to design and build a single-seat, all-terrain, sporting vehicle whose structure contains the driver [1]. Competitions in Baja are held in challenging conditions where the vehicle is put through a variety of challenges and rough terrain to test the vehicle’s dynamic performance and safety. A knuckle is an element that contains braking components which function under extreme strain and is positioned over a wheel hub. Not every terrain vehicle component features a knuckle, and each race car may have a different one. Hence, the design can be altered to accommodate a wide range of applications and suspension configurations. Figure 1 shows a CAD representation of the current knuckle. The technique of finite element analysis (FEA) is used to forecast a product's response to external forces, vibration, and other physical influences. FEA analysis determines if a product will break down, wear out, or function as designed.
Because of the difficult track layouts and terrain, choosing the rear suspension is just as critical as choosing the front. Therefore, one of the driving forces for this paper's design was to create a suspension system that maximizes vehicle stability while also being lightweight, easily changeable, tuneable, and accessible. The H-arm suspension, as its name suggests, is a style of rear suspension with an H-shaped frame that is quicker to put together than other suspension control arm configurations. The main objective of a single lateral link, sometimes referred to as a camber link, is to control the camber gain during suspension travel, while the H-frame's purpose is to withstand the lateral loads and torsion placed on it during the testing of the vehicle [2].
II. OBJECTIVES OF SUSPENSION DESIGN
- To enable for greater travel, which improves stress absorption during ground condition changes.
- In order prevent the CV joint plunging in suspension.
- This enables the tire to keep as much of a stable contact with the ground as possible. in order to give camber, gain and improved handling when cornering.
III. EXISTING DESIGN
The objective of the research is to build a knuckle having a minimum of weight with maximum strength. Aluminium 7075 alloys are the greatest choice for the modern vehicle industry to meet this criterion because they are lightweight, have a low density, and a suitable yield strength. In addition, to light-weight material utilisation, many researchers are using optimisation techniques such as: topology optimisation, shape optimisation and size optimisation [4]. The mechanical and physical characteristics of the aluminium 7075 alloy and EN8 are shown in Table 1. Using SOLIDWORKS 2022, a CAD model of the rear knuckle was created in light weight. The general suspension geometry specifications of an off-road vehicle were taken into consideration when designing the model.
Table 1. Properties of Al 7075 and EN8
|
Property |
Al 7075 |
EN8 |
|
Density g/cm3 |
2.81 |
7.85 |
|
Young Modulus GPa |
7.71 |
5.37 |
|
Tensile yield strength MPa |
503 |
635 |
|
Tensile ultimate strength MPa |
572 |
882 |
|
Weight g |
585.40 |
1616.72 |
IV. METHODOLOGY
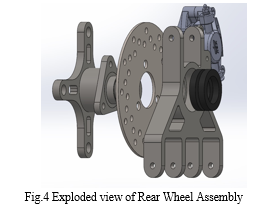
There have been two sections to this study. This study's initial segment involves modelling the wheel assembly component and analysing stresses under various load conditions. Solid Works were used to create CAD models of the component parts. In the second section, however, the models were obtained and compared by applying the technique of finite element analysis (FEA) using the ANSYS WORKBENCH Simulation software.
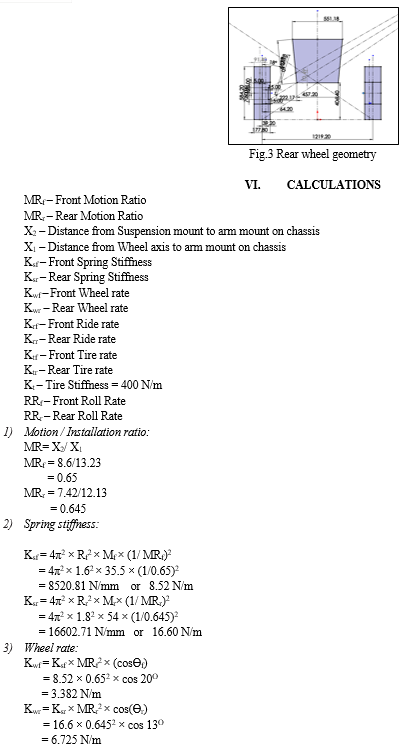
V. REAR WHEEL GEOMETRY
The objectives for the rear suspension were equally important that were set for the front, however transmission compatibility was given the highest priority. The team had previously encountered difficulties with the driving shaft plunging through the A-arm and knuckle. Gearbox height was used as a parameter to set the static angle. For this application, an H-Arm suspension system with a camber link was chosen to be the most suitable geometry. Since there is only one arm at play, there is significantly less unsprung mass, which enhances the suspension system's response. Given fewer links, serviceability and packaging are also ideal. selecting the correct design requires thorough evaluation of a number of factors Because the suspension geometry cannot be altered. Weight, cost, manufacturing time, clearance, simplicity, and familiarity represent a few of these parameters. After meticulous consideration, the H arm and camber link rear suspension system was chosen. The design of the H arm was selected because it is simple to construct and costs less money to manufacture
During cornering load transfers take place to the outer wheels and large patch of tire need to stay in contact with ground to ensure better traction and hence stability [3]. As a result, camber Changes is reduced. Without a driver, static camber is maintained at zero, but when a driver exists, a negative value is ensured, improving lateral stability. However, Heim joint threads can be used to modify a static value.
VII. DESIGN CONSIDERATION AND VEHICLE KINEMATICS
The front Track width of the vehicle was chosen to be 50” for better stability and rear track width reduced to 48” for better traction during acceleration. The 15” inch ground clearance of the vehicle provides the wheel vertical room to travel and absorb shocks. This helps reduce scraping against the obstacles and reduces damage under body. The negative camber aids in better handling at corners and this setup is expected to oversteer in the track because of the camber angles pre-set at the front. Static camber is set to -2 degree in order to maximize contact patch during lateral load transfer during cornering.
The KPI is set to 8 degrees in order to get self-aligning torque that reduces steering effort. The scrub radius was reduced to 28.72mm by optimizing the hub design. The front roll center is positioned near CG in order to reduce body roll during cornering. The roll centre is optimized in such a way that calculated jacking force is less than the lateral force on tyre. The front roll center is also kept lower than the rear roll centre in order to promote oversteering of the vehicle. Lowering the front roll center lowers the roll moment resistance and also makes the wheels evenly loaded which increases the grip. The value of motion ratio is very important to arrive at ride frequency, ride rate, wheel rate, spring rate, damping ratio, critical damping coefficient etc. The value of motion ratio is chosen in such a way that it provides higher shock displacement & velocities. Shock absorbers provide rapid damping response & perform better at higher velocities.
The positive caster of 5 degree reduces steering effort and provides self-aligning torque. Anti-dive percentage is kept at 40% in order to divide the load transfer during braking between suspension and A-arms. This prevents camber gain and offers maximum contact patch during braking.
Table 2. vehicle parameters
|
PARAMETER |
FRONT |
REAR |
|
Load distribution- static (%) |
40 |
60 |
|
Sprung mass (Kg) |
71.11 |
108 |
|
Unsprung mass (Kg) |
17.15 |
22.4 |
|
Static camber (deg.) |
-2 |
0 |
|
Caster (deg.) |
5° |
- |
|
KPI (deg.) |
+8 |
|
|
Scrub radius (mm) |
28.72 |
|
|
CG height (mm) |
600 |
|
|
Ground clearance (mm) |
15” |
|
|
Roll centre height(mm) |
389.65 |
410.28 |
|
Spring stiffness(N/mm2) |
8.52 |
16.59 |
|
Motion ratio |
0.65 |
0.65 |
|
Wheel rate(N/mm) |
3.38 |
6.73 |
|
Ride frequency (Hz) |
1.6 |
1.8 |
|
Damper stroke |
5.3” |
6.4” |
|
Anti-dive/squat(%) |
40 |
0 |
Air shock absorbers are used for better bound and rebound during bumps quick contact with ground. FOX EVOL shocks feature a main chamber with infinite adjustable air springs, air volume chamber for bottom-out adjustment and external rebound adjustment used at the front. Float 3 Evol-R with eye-to-eye length of 18.6” is used at rear with an optimum travel of 6.4”. The tuneable parameter of the double wishbone geometry providing a highly customizable dynamic setup in front. Unequal and Unparallel geometry at front minimizes camber change and toe change during bump and cornering.
The hard points are taken from front and side view geometry and validated using Lotus suspension analysis software. The geometry is optimized for bound and rebound travel of 120mm, roll angle of 5 degree and steer travel of 35mm. The hard points are relocated to minimize toe and camber change during bump, roll and steer conditions. When compared to other metals, EN8, used for upright, has higher yield strength and cost-efficiency. The wheel hub made of EN24 is designed and used with lightweight aluminium rim of 10inches.
The appropriate hard points were chosen after several iterations till the dynamic properties of the vehicle were attained as expected. The control arms design was done in such a way that the geometric parameters can be adjusted to tune the system according to requirements. After modelling the wishbones in Solid works the structural analysis was carried out in ANSYS Workbench. AISI 4130 1” diameter and cross section of 2mm was chosen for rear control arms.

Conclusion
The aim of this study was to develop the Rear wheel assembly through the evaluation of dynamic forces. These forces were assessed utilizing fundamental principles, leading to the selection of materials based on the calculated forces. The design of the upright component was established using suspension points, taking into account dynamic forces and applying a safety factor. Validation of the design was conducted using Ansys software. Subsequently, the designed assembly was fabricated and tested under rough terrain conditions in an ATV. No failures were encountered during testing, leading to the conclusion that the force calculations and design are deemed satisfactory.
References
[1] BAJA SAE India Rulebook 2024 [2] Aniket Thosar,2014.” Design, Analysis and Fabrication of Rear Suspension System for an All Terrain Vehicle “International Journal of Scientific & Engineering Research, Volume 5, Issue 11, November-2014 ISSN 2229-5518 [3] Thomas D. Gillespie, 1992. “Fundamentals of Vehicle Dynamics,” SAE International. [4] A. Khalkhali, E. Nikghalb and M.Norouzian, “Multiobjective optimization of hybrid carbon/glass fiber reinforced epoxy composite automotive drive shaft”, International Journal of Engineering (IJE), Vol. 28, No. 4, (2015), 583-592
Copyright
Copyright © 2024 Subramanian M, Rahul V, Dr. Ayyappan P R. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET59363
Publish Date : 2024-03-24
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online