

Ijraset Journal For Research in Applied Science and Engineering Technology
Design & Fabrication of Water Optimized - Solar Panel Cleaning Robot
Authors: Aniket Mali, Purvil Jain, Vaibhav Futane, Harshal Jadhav, Prof. Ashish Devshette
DOI Link: https://doi.org/10.22214/ijraset.2024.63074
Certificate: View Certificate
Abstract
Maintaining a power capacity of solar cell is the main thing for exercising solar power system. Most common problems in solar power system are dust, beach, creature’s pollen and crops burning. These challenges have a huge impact on the power generation capacity of solar panel. The thing of the robot\'s conception design is to make a machine that\'s easy to install, adaptable in terms of configuration, and requires lower labourers and functional charges. The robot is equipped with helical comber skirmishes which are driven by dc motor so that the robot is enforced with a water sprinkle in order to clean the panels far and wide it moves through. In this design, a system contains a length dimension unit and bedded control schemes in order to drive a movement directly and to localize the positions of the robot.
Introduction
I. INTRODUCTION
The adding demand for renewable energy has propelled the global proliferation of solar panels. Still the effectiveness of solar panels is significantly impacted by the accumulation of dust, dirt, and other particulate matter on their shells. This issue is particularly pronounced in thirsty and semi-arid regions, where dust deposit can reduce solar panel effectiveness by as important as 20% - 40%. The pressing need for a sustainable, effective, and water-conservative cleaning result for solar panels has led to the development of innovative robotic systems.
This paper focuses on the design and fabrication of a water- optimized solar panel cleanser robot, aimed at addressing the inefficiencies and environmental enterprises associated with conventional cleaning styles. The proposed robot leverages advanced mechatronic systems and innovative design principles to insure optimal cleaning with minimum water operation. The integration of detectors, microcontrollers, and perfection engineering allows the robot to navigate the solar panel arrays autonomously and acclimatize to varying situations of dirt, and execute drawing cycles with high effectiveness.
The design process emphasizes the need for a feather light, durable, and cost-effective result that can operate under different environmental conditions. By incorporating water-effective technologies similar as fine mist sprayers and controlled water inflow systems, the robot is able of significantly reducing water consumption compared to traditional cleaning styles. Also, the robot's design incorporates renewable energy sources, icing its operation is sustainable and environmentally friendly.
This paper details the design considerations, engineering challenges, and fabrication processes involved in creating the water- optimized solar panel cleanser robot. It also presents the results of performance tests conducted under colourful environmental conditions, demonstrating the robot's effectiveness in maintaining solar panel effectiveness and its implicit for large- scale deployment. By addressing the critical issues of water operation and drawing effectiveness, this exploration contributes to the advancement of sustainable practices in solar energy conservation and offers a feasible result for enhancing the performance and life of solar panels worldwide.
II. LITERATURE SURVEY
This exploration aims to design and develop the Solar Panel drawing Robots by studying Solar
Panel drawing Robots movement which work suitably with Wireless Joystick, Sensor Sonar using Gear Motor and Arduino microcontroller [1]. Regular cleaning, especially in high dust areas, is essential for maintaining optimal power generation. The proposed solar panel cleaning robot operates autonomously. It is self-powered by a solar PV panel mounted on the robot, and can be controlled remotely via the Internet of Things (IoT)?[2] .The proposed research paper offers a promising solution to this challenge by automating panel cleaning, through control system schematic and rigorous testing which are necessary to ensure robustness and autonomy [3].We have developed a microcontroller-based SPCR system that is cost-effective and lightweight, specifically designed to mitigate the negative effects of dust accumulation on PV panel output [4].
The performance of PV panels is evaluated under dusty conditions and post-robot cleaning, ensuring fair comparisons of current production and efficiency under sunlight, while also assessing the functionality of a developed mobile app for system performance monitoring [5]. This paper showcase a detailed comparison of solar panel cleaning with regular traditional methods and with the robot, which in conclusion states an increase of 1.5% - 2% in efficiency [6].
III. OBJECTIVE
- Design and fabricate a cleaning robot to maintain efficiency of solar panel which is lost due to environment.
- To provide an easier solution for cleaning panels plotted on roofs.
- To minimize wastage of water.
- Provides safe & soft cleaning.
- Construct a multifunctional robot
- To build environment friendly cleaning system.
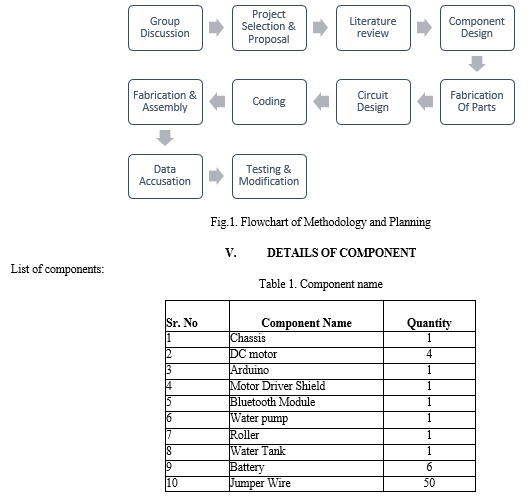
IV. METHODOLOGY
A. Methodology and Planning
Following are schematics showing the methodology and planning used to approach the design and manufacture of the final product
Conclusion
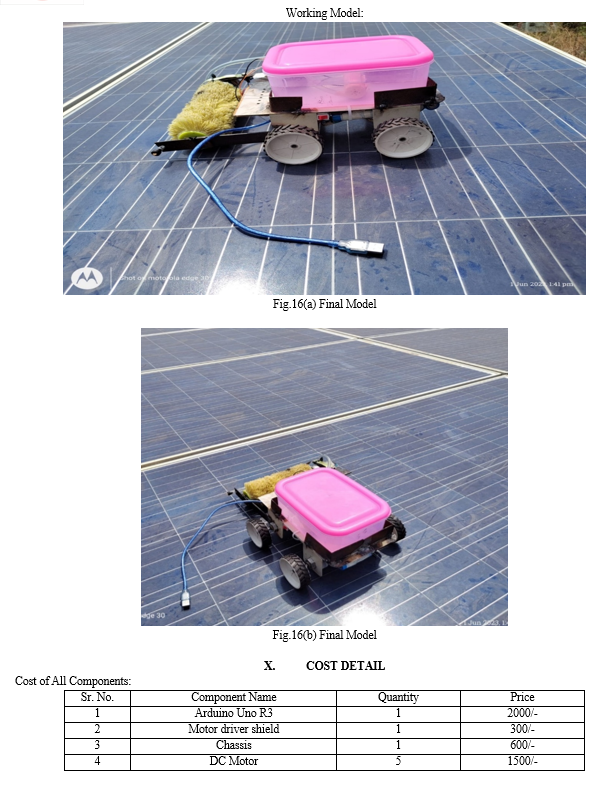
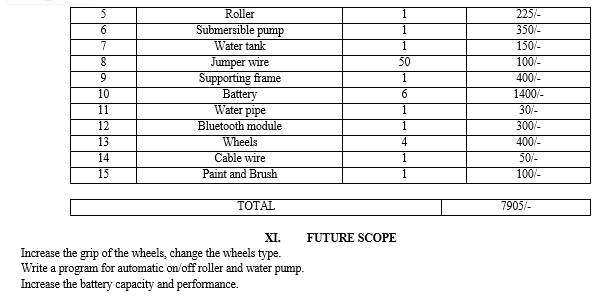
The Solar Panel Cleaning System project aimed to provide a better solution for maintaining solar efficiency. The main objective was to develop a machine that can clean a solar panel through a proper control system. This project involved developing a prototype to tap into a new and growing market. The project team encountered many obstacles along the way. Designing the control system required learning Arduino Uno R3 configurations, C language coding, and its interaction with the electrical components. Using soldering boards to implement the designed circuit, hardware wiring, motor driver shield, and machinery were new experiences. Despite these challenges, the project achieved the desired design with the planned control and mechanism. The DC motors were controlled by both drivers to manage speed and direction. The roller cleaned the panel. Additionally, control code for the DC motors and the water pump was written and implemented in the system. However, the prototype was not completed due to the challenges and limitations mentioned earlier.
References
[1] N. Ronnaronglit and N. Maneerat, \"A Cleaning Robot for Solar Panels,\" 2019 5th International Conference on Engineering, Applied Sciences and Technology (ICEAST), LuangPrabang, Laos, 2019, pp. 1-4, doi: 10.1109/ICEAST.2019.8802521. keywords: {Solar Panel;CleaningRobot;RobotA CLEANING ROBOT FOR SOLAR PANELS}, [2] S. Santosh Kumar, S. shankar and K. Murthy, \"Solar Powered PV Panel Cleaning Robot,\" 2020 International Conference on Recent Trends on Electronics, Information, Communication & Technology (RTEICT), Bangalore, India, 2020, pp. 169-172, doi: 10.1109/RTEICT49044.2020.9315548. keywords: {Robots;Robot sensing systems;Cleaning; Solarpanels; Hardware; Brushes; Serv ers;Solar;Photo;Voltaic;IoTs;robot;plant;PV}, [3] M. A. Jaradat et al., \"A fully portable robot system for cleaning solar panels,\" 2015 10th International Symposium on Mechatronics and its Applications (ISMA), Sharjah, United Arab Emirates, 2015, pp. 1-6,doi: 10.1109/ISMA.2015.7373479. keywords: {Cleaning;Powergenera tion;Robots;Surfacetr eatment;Degradation;Pollutionmeasurement;Electrostatics}, [4] Akyaz?, Ö.,?ahin, E., Özsoy, T., Algül, M. (2019). A Solar Panel Cleaning Robot Design and Application. AvrupaBilimVeTeknoloji Dergisi343-348. https://doi.org/10.31590/ejosat.638291 [5] N. Hashim, M. N. Mohammed, R. AL Selvarajan, S. Al-Zubaidi and S. Mohammed, \"Study on Solar Panel Cleaning Robot,\" 2019 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS), Selangor, Malaysia, 2019, pp. 56-61, doi: 10.1109/I2CACIS.2019.8825028. keywords: {Cleaning;Robots;Software;Monitoring;Microcontrollers;Solarpanels;Cameras;Self-Cleaning;IoT. Dust Detection;Mobile Robot}, [6] Patil, Satish, and H. M. Mallaradhya. \"Design and implementation of microcontroller based automatic dust cleaning system for solar panel.\" Int. J. Eng. Res. Adv. Technol.(IJERAT) 2.01 (2016): 187-190.
Copyright
Copyright © 2024 Aniket Mali, Purvil Jain, Vaibhav Futane, Harshal Jadhav, Prof. Ashish Devshette. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET63074
Publish Date : 2024-06-03
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online