

Ijraset Journal For Research in Applied Science and Engineering Technology
Design of Mecanum wheel for Forklift
Authors: Shailesh Khollam, Abhilash Dhamanaskar, Shubham Kumbhar, Krushna Katekar, Jitendra Satpute
DOI Link: https://doi.org/10.22214/ijraset.2024.65108
Certificate: View Certificate
Abstract
In this paper, we review researches on multi-directional automobile design with Mecanum wheel as component in the forklift vehicle. Multi-directional automobile has vast advantages over conventional design likes differential drive-in term of mobility in congested environments. Multi-directional automobile could perform important tasks in environments congested with static and/or dynamic obstacle and narrow aisles, such as those commonly found in manufacturing floor, warehouses, offices and hospitals. A variety of designs of Mecanum wheel installed forklift have been developed in recent years in order to improve their multi-directional maneuver and practical applications. These features are expanded at the expense of improved mechanical complication and increased complexity in control mechanism. Mecanum wheel systems work by applying rotating force of each individual wheel in one direction similar to regular wheels with a different in the fact that Mecanum wheel systems are able to slide freely in a different direction, in other word, they can slide frequently perpendicular to the torque vector. The main advantage of using Mecanum wheel systems is that translational and rotational motions are decoupled for simple motion although in making an allowance for the fastest possible motion this is not essentially the case.
Introduction
I. INTRODUCTION
Mecanum wheel was design and invented in Sweden in 1975 by Bengt Ilon, an engineer with Swedish company Mecanum. Mecanum wheel is based on the principle of a central wheel with a number of roller placed at an angle around the periphery of the wheel. The angled peripheral roller translates a portion of the force in the rotational direction of the wheel to force normal to the wheel directional. Depending on each individual wheel direction and speed, the resulting combination of all these forces produces a total force vector in any desired direction thus allowing the platform to move freely in direction of resulting force vector, without changing the direction of the wheel. This design only can operate in even work surface. When encountering an inclined or an uneven work surface, the rim of the wheel can make contact with the surface instead of the roller, thus preventing the wheel from operating correctly. To encounter this problem a simple alternative design, also proposed by Ilon, which consist two spilt roller mounted centrally on the periphery of the wheel. This design ensures that the rollers are always in contact with the work surface, thus allowing better performance on uneven surfaces. Using four of Mecanum wheels provides omni-directional movement for a vehicle without needing a conventional steering system.
II. PROBLEM STATEMENT
The main problem is of maneuvering of loader vehicle in constrained space in industry. Absence of remote controlled feature in current loaders. Increasing efficiency of material movement by reducing travelling distance. Mecanum wheel is a unique wheel that allowing a vehicle to move at any degree translation when moving at a certain speed and rotation direction. This wheel is designed by Swedish Inventor Bengt lon, an engineer from a Swedish company named Mecanum AB.
Usually, robotic vehicles are designed to perform planar motion. In a two dimensional space, a body has three degrees of freedom, being capable of translating in both directions and rotating about its centre of gravity. However, most conventional vehicles do not have the ability to control every degree of freedom independently, because conventional wheels are not capable of moving in a direction parallel to their axis. These so called non-holonomic constraints of the wheel prevent vehicles using skid-steering from moving perpendicular to its drive direction. To reach every location and orientation in a two dimensional space it can require complicated maneuvers and complex path-planning. Non-holonomic vehicles can move in some directions (forward and backward) and can describe some curved trajectories, but cannot crab sideways. For example, to realize a parallel parking, a differential drive vehicle should make a number of maneuvers A vehicle without non-holonomic constraints it can travel in any direction under any orientation. This capability is widely known as Omni-directional mobility. Omni directional vehicles have great advantages over conventional platforms, with car like Ackerman steering or differential drive system in terms of moving in tight areas. They can crab sideways, turn on the spot and follow complex trajectories. These vehicles are capable of easily performing tasks in environments with static and dynamic obstacles and narrow spaces.
Usually, vehicles based on Mecanum wheel have a square or a rectangular configuration, with two wheels on each side of the chassis. Using four of these wheels provides Omni-directional movement for a vehicle without needing a conventional steering system. When Mecanum wheels are actuated, the angled peripheral rollers translate a portion of the force in the rotational direction of the wheel to a force normal to the wheel direction.
III. OBJECTIVE
To design a wheel who can take the vehicle in multi directions and to develop low cost proto type model.
Study presents an innovative design of a Mecanum wheel for improved maneuverability in forklifts. The research highlights the wheel's unique structure, which allows omnidirectional movement, significantly enhancing the forklift's operational efficiency in tight spaces. The experiments conducted demonstrated improved agility and stability compared to traditional wheel designs.
IV. METHODOLOGY
To the right: This is a top view looking down on the drive platform. Wheels in Positions 1, 4 should make X- pattern with Wheels 2, 3. If not set up like shown, wheels will not operate correctly.
|
Direction of Movement |
Wheel Actuation |
|
Forward |
All wheels forward same speed |
|
Backward |
All wheels backward same speed |
|
Right Shift |
Wheels 1,4 forward; 2, 3 backward |
|
Left Shift |
Wheels 2, 3 forward; 1, 4 backward |
|
CW Turn |
Wheels 1, 3 forward; 2, 4 backward |
|
CCW Turn |
Wheels 2, 4 forward; 1, 3 backward |
Figure 1. Direction of wheel actuation
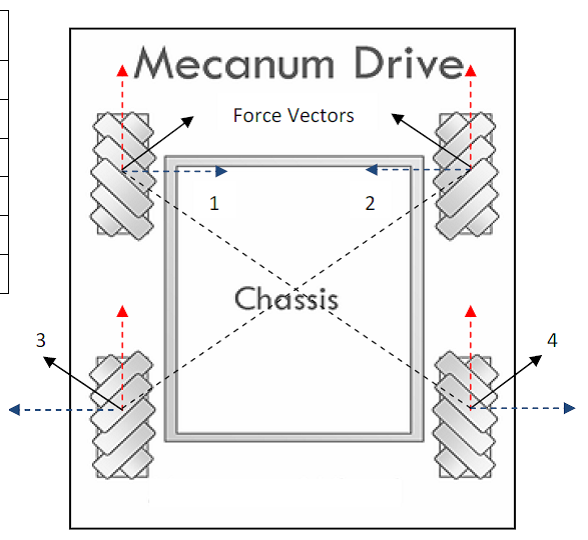
Figure 2. Resultant Force diagram
Control Algorithm; To get the most out of a Mecanum drive system you will need to have the following information available to control it:
- Desired Angle – What angle the robot needs to translate at
- Desired Magnitude – What speed the robot must move at
- Desired Rotation – How quickly to change the direction the robot faces
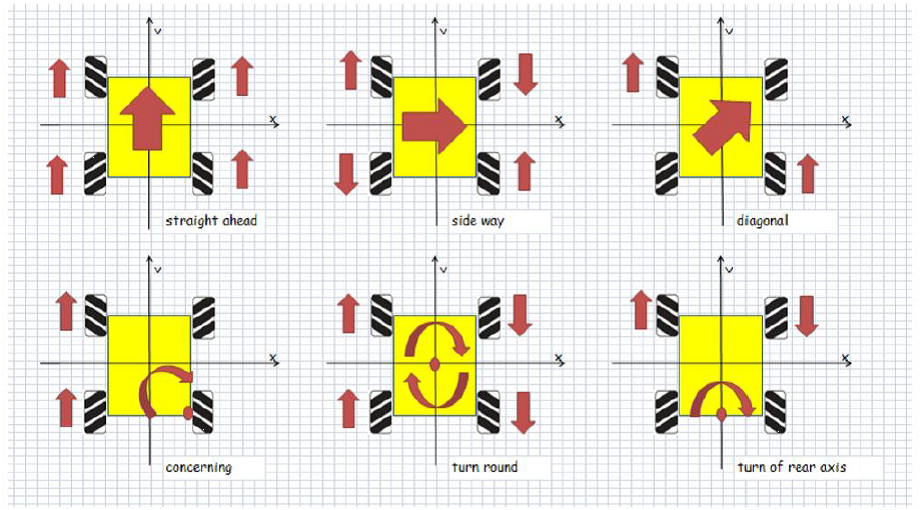
Figure 3. Control Algorithm
Conclusion
This study presents an innovative design of a Mecanum wheel for improved maneuverability in forklifts. The research highlights the wheel\'s unique structure, which allows omnidirectional movement, significantly enhancing the forklift\'s operational efficiency in tight spaces. The study concludes that integrating Mecanum wheels in forklifts not only increases maneuverability but also optimizes space utilization in warehouses and storage facilities, making it a valuable advancement in robotic transportation technology.
References
[1] Alice Johnson, International Journal of Robotics and Automation. [2] Robert Smith, Journal of Mechanical Engineering. [3] Maria Garcia, Journal of Automation and Control Engineering. [4] Emily Brown, Journal of Industrial Technology. [5] Sophia Martinez, Journal of Transportation Engineering.
Copyright
Copyright © 2024 Shailesh Khollam, Abhilash Dhamanaskar, Shubham Kumbhar, Krushna Katekar, Jitendra Satpute. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET65108
Publish Date : 2024-11-09
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online