

Ijraset Journal For Research in Applied Science and Engineering Technology
Design of Sepic Converter Using PID Controller
Authors: S. Sai Susmitha, D. Abhigna
DOI Link: https://doi.org/10.22214/ijraset.2023.55919
Certificate: View Certificate
Abstract
Single-Ended Primary Inductor Converter (SEPIC) is widely used in battery charging of renewable energy and electric/hybrid vehicles due to its output gains range flexibility,less complex switching design, providing an isolation by capacitor and producing non-inverted output. This project presents a modified PID controller to obtain excellent dynamic performance with zero steady-state error. The controller design is discussed and built in discrete model simulation on Matlab-Simulink. The effectiveness of the proposed modified PID control strategy is tested for the transient cases in step-changed reference voltage, and varying input voltages. The results show the proposed controller can reach zero steady-state error and produce lower ripple in voltage.
Introduction
I. INTRODUCTION
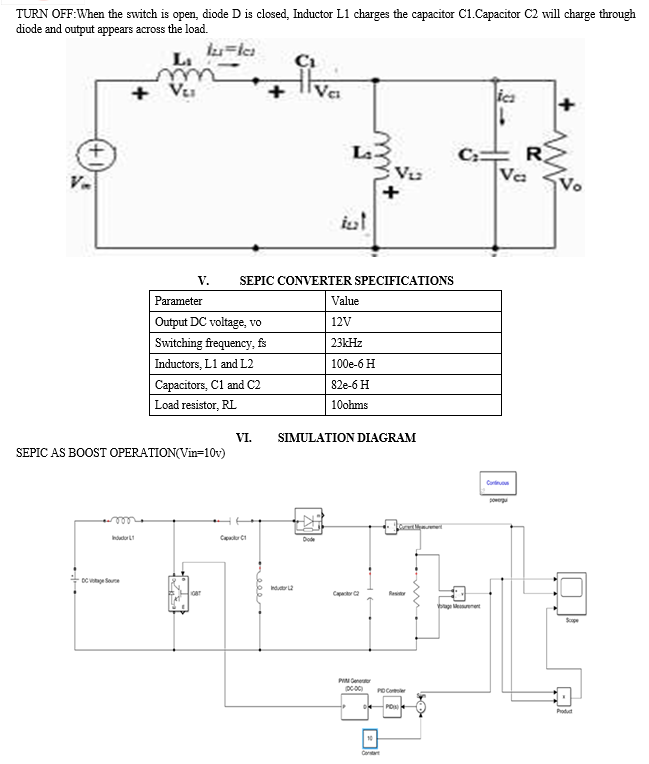
The SEPIC converter provides the desired output voltage through duty cycle gain. However a feedback controller is required to maintain the output voltage equals voltage reference when disturbance exist to the system, such as load, voltage input and reference are changed. The most popular feedback control is proportional-integral-derivative (PID)controller and PI controller. This paper presents a design of a discrete modified PID controller of the SEPIC converter and verified through Matlab-Simulink. The proposed controller regulate the output voltage equal the reference with excellent dynamic response. The advantage of using the proposed control technique is that the transient response of the system can be controlled by tuning only the integral gain to achieve the desired response. Unlike other controllers (e.g., current controller, sliding mode controller, and fuzzy plus-PI controller), this controller also uses only the DC-voltage sensor to achieve zero-steady-state error output voltage with high dynamic response, whether the disturbance is small or large.



Conclusion
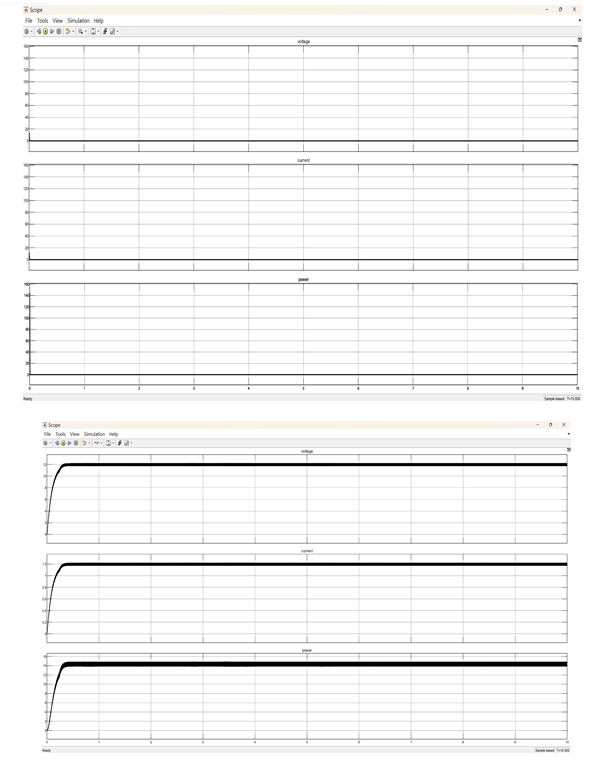
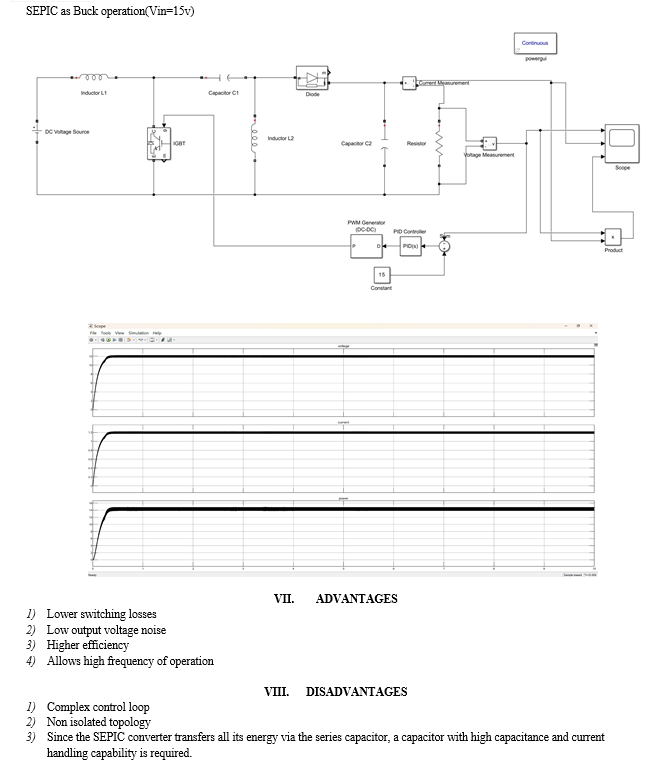
The modified PID, known as I-D voltage feedback controller for SEPIC converter was presented. The algorithm is modeled in discrete domain, and then verified by MATLAB/Simulink simulation. The results show the proposed controller can reach zero steady-state error, in two transient cases: the voltage reference changed and varying the input voltage for 10V and 15V. The SEPIC converter acts as boost converter during input voltage of 10V, where output voltage is higher than input voltage. During input voltage is 15V, the SEPIC converter turns to buck converter since the output is lower than input voltage. THANK YOU
Copyright
Copyright © 2023 S. Sai Susmitha, D. Abhigna. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET55919
Publish Date : 2023-09-28
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online