

Ijraset Journal For Research in Applied Science and Engineering Technology
Design of Twist Morphing Mechanism for Horizontal Stabilizer
Authors: Bilji C Mathew, Prantik Dutta, Sagar K Sahu, Vasudha Kunjir, Samruddhi Chaugule
DOI Link: https://doi.org/10.22214/ijraset.2022.40531
Certificate: View Certificate
Abstract
Mimicking birds to enhance aerodynamic efficiencies of modern day aircrafts is a method that has seen major applications in the aerospace industry. Birds, due to their feathers, muscles and distinct morphologies tend to utilize methods that are otherwise impractical to incorporate in aircrafts due to limitations in terms of structure and materials. Yet, major influences are seen in many aircrafts that are inspired by the aerodynamic features of avian beings. Morphing is a major method that helps aircrafts make changes to their components, such as their wings to adapt or adjust to their varying flight conditions for efficient control and performance. In this paper, a mechanism is designed that aims at using morphing techniques to mimic a bird’s tail. The main purpose of this design is to achieve yaw control and directional stability in absence of a rudder and with the aid of the horizontal stabilizer solely.
Introduction
I. INTRODUCTION
Aircraft Performance is one of the outmost priorities while designing an aircraft for any particular task. Researchers and designers have been working on technologies and mechanisms that could improve the manoeuvre and performance of an aircraft and increase its efficiency to a certain level. Wing morphing is one such technology, the word ‘morph’ is a Greek word which means ‘shape change’, where an aerodrome vehicle alters its shape or geometry during its flight time for adapting the surrounding condition to gain maximum efficiency in flight.
In the field of engineering, morphing refers to the continuous change or entity deformation upon actuation. Thus, wing morphing is the continuous change or deformation of wing upon actuation to adapt to the mission profile to provide maximum efficiency. Wing Morphing can be classified on the basis of shape change in a particular area in an aircraft wing as shown in Fig 1.

After years of research on different techniques, concepts and innovations; compliant mechanisms, smart materials, biomimicry, artificial feathers and lattice-based models took-over the old actuators reducing the excess weight and providing an efficient and practical approach for morphing wings. Let us discuss some types of morphing wings.
- Swift Morphing Wing- In varying wind conditions, morphing is achieved by birds to perform different manoeuvres. Swifts is a gliding bird that adjusts the form and scale of its wings to undergo gliding and captures prey with high speed through head winds, tail winds, cross winds and gusts. Bird wings may be used to evaluate how the wing geometry selected by a bird maximizes its flight efficiency. Apus apus spends the major time of his life in flight and has a diverse gliding repertoire that includes soaring, gliding, and 'flap-gliding.' The shape of these birds' wings, as well as their speed and direction, can be used to deduce their behaviour.

2. Wing Warping- The so-called 'wing warping' technology attempts to replicate the agility and productivity used in bird flight. The idea of wing warping was apparently inspired by discovering how, when restored to its usual shape; a cardboard bicycle tube box could be warped but still be stable. The Wright Brothers used the control systems in their glider, and is one of the earliest wing morphing examples known. Later due to need of high stiffness and rigidity, conventional mechanical linkages came into picture for control surfaces. But since introduction of new smart, light and strong materials research has been started with name of morphing. Thus, morphing is just the advanced version of wing warping.

3. In-plane Morphing: In-plane morphing is the type of 2Dmorphing and it consists of –
a. Variable Span: Variable span morphing is a kind of 2D morphing in which the manipulation of the span can be done by using different mechanisms. Variable span technique is a well-known type of in-plane morphing that has been used and tested several times. By using variable span, the elimination of the problems can be done that are encountered by both the wings, i.e., an aircraft or UAV that has the capability to reduce or enlarge the span of the wing as needed. These are some mechanisms that use variable span morphing-
- Telescopic Wing Morphing: In these mechanisms two separate wings are made, one is inserted into the other, and there is a tool which manipulates the wing span by moving one wing over other.
- Folding Wing Morphing: In these mechanisms a wing is completely folded, like origami, and enlarges itself whenever the span needs to be increase. Selecting a material is of the critical component of this mechanism.
b. Variable Chord: Chord morphing is a mechanism in which the manipulation can be done to get the shortest distance between leading and trailing edge of the wing, i.e., a chord. By changing the aspect ratio and wing area, aerodynamic efficiency can be improved.
c. Variable Sweep: Variable sweep morphing has been popular and has produced better results than other types of wing morphing. This type of morphing technique helps to change the sweep angle of the airplane wing that help airplane in various situations.
4. Out-plane Morphing: Out-Plane morphing is a type of 3D morphing and it is consisting of-
a. Twist Morphing: This morphing technique was first used by Wright brother in their plane (wing warping), and therefore this is the world first used morphing technique. The use of this technique helps to increases lift-to-drag ratio& decreases weight.
b. Span Wise Bending: The use of this technique decreases the span and manipulation in the 3-dimensional geometry can be made. This morphing technique used in low and high speeds because it helps to reduce drag and improve stability.
The tail of a bird aids in manoeuvring, maintaining stability, lift generation and drag reduction. One hypothesis is such that even though the tail produces a positive lift, the lift is not strong enough to act as an independent delta wing plan-form. The vortices downstream lie above the bird’s tail where absorption of the vortex sheets that are being shed from the tail’s leading edge takes place. The tail also aids in the reduction of parasitic drag [1], [2].
Mimicking the birds’ tail morphing abilities with the help of mechanical morphing techniques can help enhance the yaw stability and control for rudderless UAVs.
II. LITERATURE REVIEW
Morphing wing technology is introduced to planes, so that, it could substantially reduce fuel consumption. In comparison to a non-morphing design optimisation, where the advantage grows with range, there's a 0.2 to 0.7 percent reduction in fuel usage. Twist morphing is when the aerodynamic twist at different points across the span changes through flight where the profile of the airfoil remains an equivalent. Shape memory actuators, Servos, piezoelectric and hydraulic actuators can help to create twist morphing. The twist morphing capacity possesses a touch impact on the interior structural components of the wing, counting on how the aircraft is built. Servos, shape memory actuators, piezoelectric actuators, and hydraulic actuators can all be used to produce twist morphing [3].
The goal of this project is to make and test a replacement morphing wing model that had the capability to undergo smooth twisting focussed on one wing segment. This sort of twisting deformation concept, where the twisting distortion is localised on a bit of the wing, was never tried before and is beneficial for conventional flying goals like slow speed while keeping a selected altitude, take-off, and landing. On a UAV, the primary concept for incorporating twist morphing was on a selected section of the wing is presented and executed. A positive wing twist increases drag while increasing lift and giving the pilot more control over the plane's roll. *At a 2° angle of attack, the twisting wing section is the primary reason for virtually all of the lift force, resulting in a lift-to-drag ratio increase of nearly 13% [4].
It is demonstrated that for a variety of flying conditions, adaptation, together with stall recovery, may be done exclusively through geometric tailoring rather than attitude correction, thus minimising the drag cost is interrelated with operating in the non-adapted condition. Stall recovery by virtue of geometric tailoring is possible for even wider variety of situations by including another degree of freedom to the chord-wise deformation, similarly a morphing hinge capable of increased actuation and reflex camber [5].
This work discusses the modelling of a camber-morphing AWE system, with a focus on the aircraft's linked aero-elastics and flight dynamics, as well as the morphing wing's reduced-order structural and aerodynamic model.
The camber morphing concept was implemented throughout the entire span of the wing structure, and it could be imagined manoeuvring and simultaneously adapting the span-wise lift distribution to various flight circumstances as well as wind speeds, maximising the AWE system's power output capabilities. Using morphing throughout the entire wing span would improve shape altering, wing adaptability, and thus power output capability.
Airborne wind energy (AWE) is a power generation system which uses tethered aircraft for gathering energy from high-altitude winds.
The guiding is divided by managing the aircraft's radial and lateral dynamics individually. The winch and pitch controller regulate the radial dynamics, while the roll controller controls the lateral dynamics. The aeroplane is stable in the yaw direction and no active control is used [6].
Potential applications include passive lattice, corrugated, and elastomeric structures. The authors offer a method for narrowing the gap between skin structural properties and the utility of a mechanism for a morphing wing.
Skins for morphing wings are designed using simply geometric or static structural analysis; dynamic deformation, dynamic strength, or aero-elasticity is not taken into account. Structural loads or linear displacements were referred to the skin as boundary conditions during the simulation, causing open end of the wing/skin profile to change to NACA 8410, while the other - fixed end remained NACA 2410 [7].
The goal of this research was to research the impact of all design factors on the twist-morphing skin's torsional and out-of-plane compliances so as to guide the planning process and therefore the selection of appropriate actuators for this application. to make sure that the skin can carry the utmost applied aerodynamic loads while twisting with the littlest feasible actuation forces, the planning procedure necessitates a careful compromise. one among the foremost useful morphing techniques is twist-morphing. This type of out-of-plane morphing allows for a smooth shift in angle of attack (AOA) across the wing's span.
As a result, reducing the discontinuous surfaces of ailerons and flaps can reduce generated drag on a wing. Contrary design criteria of high out-of-plane rigidity to sustain aerodynamic loads and low in-plane stiffness allow morphing with available actuation forces. Increase the width ratio; reduce the amount of elastomeric sections, composite plies, and the elastomer's torsional rigidity to increase torsional compliance. However, the out-of-plane rigidity would be reduced as a result of this. The research focused solely on static structural analysis, with no consideration of dynamic consequences. The study also ignored the elastomeric skin's fatigue life and temperature-dependent behaviour [8].
The properties of a completely unique load-bearing and versatile construction appropriate for morphing wing applications got during this paper. The ultimate construction would be less flexible if other parameters remained constant because the cloth wont to coat the proposed structure became stiffer.
When utilized in conjunction with an elastomeric skin, distortion within the pressure area occurs, deforming the form of the wing airfoil and lowering its aerodynamic efficiency. Aluminum and polymer-based composites, which are commonly utilised to construct this part of the wing, offer extraordinarily high stiffness and strength. Thanks to low elastic strain (like aluminium) also low failure strain, substantial.
Deformations for these skins aren't conceivable (in composites). Furthermore, even little deformations in these materials necessitate an incredible force, is beyond the capabilities of typical actuators. As a result, the skin of a deformable wing structure should be not only flexible but also capable of sustaining aerodynamic loads at an equivalent time. The proposed structure can be used to change the morphing wing airfoil's camber due to its ability to fabricate structures with a large range of flexibility (depending on the requirement, the preferred sandwich structure's flexibility could be minimized or increased during design), reduced distortion and wrinkling problem during load-bearing, and easy fabrication [9].
For a roll motion of morphing aircraft, the work presents a revolutionary active flow control method based on a synthetic jet actuator. To simulate a typical control surface, the pair of the array of the actuator with the optimised cavity shape and the morphing span, where both are subject to the input saturation limit, are used in this model.
To solve this difficulty of modelling and controlling morphing aircraft at a high AoA, active flow control and sliding mode control is combined. Roll damping, morphing motion, and aerodynamic fluctuation have all been taken into account when developing the dynamic model [10].
Aerodynamic optimization research was carried out for an aircraft with changeable span, sweep, and chord length was carried out in this work to find the best configurations for subsonic, transonic, and supersonic speeds. The main concern is to obtain maximum values for the lift-to-drag ratios for each flight state while taking into account lift coefficients and static stability. At subsonic speeds, the optimum wing has a low sweep angle, high aspect ratio, plus wing sweep has a primary contribution to lift-to-drag ratios, while the span is secondary; at transonic speeds, the medium-sweep wing is deemed the most efficient, also the span contributes considerably more than any other parameter; and at supersonic speeds, the most efficient configuration evolves a high-sweep cropped delta wing, with the span having a dominant [11].
Design requirements for an aircraft morphing wing skin are suggested in this work, and traditional lattice structures are compared to the design criteria. The design of the morphing skin has been disregarded, despite the fact that structural deformation and aerodynamic loadings have a direct impact on the skin structure while performing the morphing mechanism. Despite the fact that lattice structures have a lower bulging effect than bulk materials, they cannot bear aerodynamic stresses and fail to achieve the stress safety factor due to alterations of the structural properties. The wing skin must have sufficient high out-of-plane stiffness to sustain aerodynamic stresses and maintain the regulated form in various flight modes [12].
To be able to morph the wing sections into specified airfoil forms, the design relies on an optimal thickness distribution both span-wise and chord-wise. At the same time, the actuation affects the span-wise twist. The approach allows for more control over lift distribution, which can be used for roll control, drag reduction, and active load alleviation. The challenges of mass and actuation energy can be overcome. When compared to a general aviation aircraft, roll authority is low, RBM reduction potential is great, and the morphing concept offers advantages when altering configurations for varied flight situations. The real aerodynamic efficiency differences between configurations were not quantified during flight tests, nor were the load relief capabilities in flight verified [13].
III. DESIGN OF MORPHING HORIZONTAL STABILIZER
As discussed, our main concern is to remove the vertical stabilizer, and to compensate the subsequent effects by the horizontal stabilizer. To achieve the goal, a horizontal stabilizer is designed by using compliant mechanisms.

In Fig 4, a side view of a rib of a horizontal stabilizer is displayed which was designed by using different components. In general, the rudder provides the yaw movement but since the vertical stabilizer is not present in the system than to generate yaw, a horizontal stabilizer is constructed in a way to get the required yaw. In this mechanism, X-connector and actuator can manoeuvre the trailing edge of the horizontal stabilizer to get yaw. The different components are used to construct a horizontal stabilizer:
- X-connector: This is the main part of the system which is connected to the actuator from one side and another is connected to the ribs. This is placed between the ribs and actuated with different angles of attack between all ribs to get the proper curve. It works in such a way that when the motor rotates the actuator, it shrinks or enlarges itself. As a result of which required yaw can be achieved.

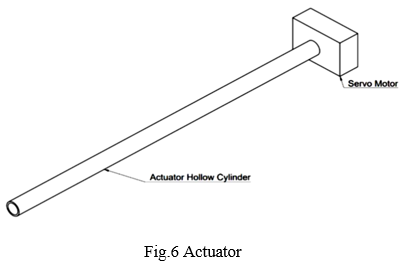
2. Actuator: This is used to provide the actuation given by the motor to X-connector. An actuator is a long unit that is connected to all the ribs of the stabilizer. Actuator passage is given in all the ribs for the actuator to pass, which is almost 1/3rd of the chord.
3. Spars: In this construction spars are designed like an X to get some stiffness. Spars are connected using clamps in all the ribs.

IV. ACKNOWLEDGMENT
The authors would like to thank the Department of Aerospace Engineering, Lovely Professional University, India for their guidance and support in the completion of this work.
Conclusion
Birds have inspired many researchers and inventors because of their aerodynamic optimality. There efficiency due to evolutionary and hereditary adaptations over millions of years. Even in the absence of a rudder or a vertical stabilizer, birds display a good amount of yaw control. Achieving this in the case of conventional aircrafts poses a lot of challenges as there are structural and material limits. The current design aims at incorporating a morphing wing mechanism in the horizontal stabilizer or tail of a conventional aircraft to mimic a bird’s tail and achieve yaw control without a rudder. Further study is required to test the effectiveness in real life scenarios along with their structural and aerodynamic characteristics which will be the crux of our future works regarding the aforementioned design.
References
REFERENCES [1] B. W. Tobalske, “Biomechanics of bird flight,” J. Exp. Biol., vol. 210, no. 18, pp. 3135–3146, Sep. 2007, doi: 10.1242/JEB.000273. [2] W. J. Maybury, J. M. V. Rayner, and L. B. Couldrick, “Lift generation by the avian tail,” Proc. R. Soc. London. Ser. B Biol. Sci., vol. 268, no. 1475, pp. 1443–1448, 2001, doi: 10.1098/RSPB.2001.1666. [3] J. P. Jasa, J. T. Hwang, and J. R. R. A. Martins, “Design and trajectory optimization of a morphing wing aircraft,” AIAA/ASCE/AHS/ASC Struct. Struct. Dyn. Mater. Conf. 2018, no. 210049, 2018, doi: 10.2514/6.2018-1382. [4] H. Rodrigue, S. Cho, M. W. Han, B. Bhandari, J. E. Shim, and S. H. Ahn, “Effect of twist morphing wing segment on aerodynamic performance of UAV,” J. Mech. Sci. Technol. 2016 301, vol. 30, no. 1, pp. 229–236, Jan. 2016, doi: 10.1007/S12206-015-1226-3. [5] L. L. Gamble, A. M. Pankonien, and D. J. Inman, “Stall Recovery of a Morphing Wing via Extended Nonlinear Lifting-Line Theory,” https://doi.org/10.2514/1.J055042, vol. 55, no. 9, pp. 2956–2963, May 2017, doi: 10.2514/1.J055042. [6] U. Fasel, P. Tiso, D. Keidel, G. Molinari, and P. Ermanni, “Reduced-Order Dynamic Model of a Morphing Airborne Wind Energy Aircraft,” https://doi.org/10.2514/1.J058019, vol. 57, no. 8, pp. 3586–3598, Jun. 2019, doi: 10.2514/1.J058019. [7] S. La, B. Alsaidi, W. Y. Joe, and M. Akbar, “Survey of skin design for morphing wing aircraft: Status and challenges,” AIAA Aerosp. Sci. Meet. 2018, no. 210059, 2018, doi: 10.2514/6.2018-0315. [8] P. L. Bishay and C. Aguilar, “Parametric Study of a Composite Skin for a Twist-Morphing Wing,” Aerosp. 2021, Vol. 8, Page 259, vol. 8, no. 9, p. 259, Sep. 2021, doi: 10.3390/AEROSPACE8090259. [9] A. Hajarian, M. R. Zakerzadeh, H. Salehi, and M. Baghani, “A combined experimental-numerical analysis of a novel deformable sandwich structure for morphing wing applications:,” https://doi.org/10.1177/1099636220979319, vol. 23, no. 8, pp. 4054–4076, Dec. 2020, doi: 10.1177/1099636220979319. [10] W. Li, W. Wang, X. Huang, S. Zhang, and C. Li, “Roll Control of Morphing Aircraft with Synthetic Jet Actuators at a High Angle of Attack,” Appl. Sci. 2021, Vol. 11, Page 505, vol. 11, no. 2, p. 505, Jan. 2021, doi: 10.3390/APP11020505. [11] C. Gong and B. F. Ma, “Shape Optimization and Sensitivity Analysis of a Morphing-Wing Aircraft,” Int. J. Aeronaut. Sp. Sci. 2019 201, vol. 20, no. 1, pp. 57–69, Jan. 2019, doi: 10.1007/S42405-018-0110-7. [12] H. You, S. Kim, and G. J. Yun, “Design Criteria for Variable Camber Compliant Wing Aircraft Morphing Wing Skin,” https://doi.org/10.2514/1.J058002, vol. 58, no. 2, pp. 867–878, Sep. 2019, doi: 10.2514/1.J058002. [13] J. L. Do Vale, J. Raffaelli, and A. Suleman, “Experimental Validation and Evaluation of a Coupled Twist-Camber Morphing Wing Concept,” Appl. Sci. 2021, Vol. 11, Page 10631, vol. 11, no. 22, p. 10631, Nov. 2021, doi: 10.3390/APP112210631.
Copyright
Copyright © 2022 Bilji C Mathew, Prantik Dutta, Sagar K Sahu, Vasudha Kunjir, Samruddhi Chaugule. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET40531
Publish Date : 2022-02-26
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online