

Ijraset Journal For Research in Applied Science and Engineering Technology
Detection of Lane & Speed Breakers for Autonomous Vehicles using CNN
Authors: Arjun Bhandari, Shivani Sakore, Shantanu Kale
DOI Link: https://doi.org/10.22214/ijraset.2024.61362
Certificate: View Certificate
Abstract
The advancement of autonomous vehicles necessitates robust systems for real-time detection of lane markings and speed breakers to ensure safe and efficient navigation. In this paper, we propose a novel approach for lane and speed breaker detection utilizing Convolutional Neural Networks (CNN). Our method achieves remarkable accuracy in identifying lane markings and speed breakers from input images captured by onboard cameras. By leveraging the capabilities of CNN, our system demonstrates superior performance in diverse environmental conditions, including varying lighting, weather, and road surface conditions. We present a comprehensive analysis of the CNN architecture employed in our system, highlighting its ability to extract meaningful features from raw image data and make accurate predictions. The training process involves a large dataset comprising annotated images of lane markings and speed breakers, enabling the CNN to learn discriminative patterns for effective detection. Furthermore, we evaluate the performance of our proposed system through extensive experimentation, quantifying its accuracy, precision, and recall rates across different scenarios. The results indicate the effectiveness and reliability of our approach in real-world settings, showcasing its potential for integration into autonomous vehicle platforms. Overall, this paper contributes to the field of autonomous driving by presenting a robust and efficient solution for lane and speed breaker detection, leveraging the power of machine learning algorithms, specifically CNN, to enhance the safety and autonomy of vehicles on the road.
Introduction
I. INTRODUCTION
Autonomous vehicles, often referred to as self-driving or driverless cars, represent a transformative technology poised to revolutionize transportation systems worldwide. These vehicles have garnered significant attention and investment in recent years due to their potential to improve road safety, reduce traffic congestion, and enhance mobility for individuals across diverse demographics.
The emergence of autonomous vehicles marks a paradigm shift in the automotive industry, where traditional notions of driving and vehicle operation are redefined by advancements in artificial intelligence, sensor technologies, and machine learning algorithms. These vehicles are equipped with an array of sensors, cameras, radar, and LiDAR systems, enabling them to perceive their surroundings and make informed decisions autonomously.
Today, autonomous vehicles are being deployed in various contexts, ranging from controlled environments such as industrial sites and campuses to public roads in select regions with regulatory approval. Companies at the forefront of autonomous vehicle development, including automotive manufacturers, technology firms, and startups, are actively testing and refining their systems to meet stringent safety and performance standards.
Looking ahead, the widespread adoption of autonomous vehicles holds immense promise for transforming urban mobility, reducing carbon emissions, and enhancing transportation accessibility for people with disabilities and those in underserved communities. As these vehicles become more prevalent on our roads, addressing key challenges related to safety, reliability, and efficiency becomes paramount.
One critical aspect of autonomous vehicle technology is the accurate detection and interpretation of road infrastructure elements, such as lane markings and speed breakers, to facilitate safe navigation and decision-making. In this paper, we focus on addressing this challenge by leveraging machine learning algorithms, specifically Convolutional Neural Networks (CNN), to enhance the efficiency and effectiveness of autonomous vehicles.
By developing a robust system for the detection of lane markings and speed breakers, we aim to contribute to the advancement of autonomous driving technology, improving the safety and autonomy of vehicles on the road.
Our approach involves leveraging the power of CNN to analyze input images captured by onboard cameras, enabling real- time detection and classification of relevant road features.
Through comprehensive experimentation and evaluation, we demonstrate the efficacy of our proposed system in various environmental conditions, showcasing its potential for integration into autonomous vehicle platforms. Ultimately, this paper aims to accelerate the development and deployment of autonomous vehicles by addressing critical challenges in perception and decision-making, paving the way for a future where transportation is safer, more efficient, and more accessible for all.
II. LITERATURE SURVEY
Speed breakers in India are accountable for about 10,000 plus deaths each year. The nation has a recorded data of about 400 deaths a day–or around one death every four minutes. According to the ‘‘Road accidents in India 2018", the data collected from all the States and Union Territories showed that the total number of accident related deaths in 2018 stood at 1,51,417 out of which around 40% is due to ignorance of speed breaker.
This indicate an increase of 2.3% over the figures for 2017. Out of this, about 85% of the deaths happen in the age group of 18–60 [12,13]. Over speeding and improper visibility conditions have made people lose not only their own life but also the other people on the roads. According to a survey done by The Times of India, speed breakers account for around 30 crashes and 9 deaths every day [10]. According to the analysis done by the Road Transport & High ways Ministry in 2018, approximately 7672 deaths occurred as a result of accidents caused due to unawareness of speed breakers.
This figure is not less and it is increasing every year [7]. According to a survey conducted recently, it has been noticed that the main cause of accidents is that the vehicles are thrown off balance, especially while travelling on new route and in night.
Also, though the Google maps provide data about ongoing repairs on a road but there does not exist any concept of providing any data about the location of speed breakers [7– 10].
III. RELATED WORKS
- Real time speed bump detection using Gaussian filtering and connected component approach [1]
Speed bump detection is studied in this paper using Gaussian, median filtering, image subtraction, binary image conversion and connected component approach which alert the driver during his / her driving. Due to their pattern, color and dimensionality, and road conditions, this approach is ideally suited for the painted speed bump. This can be done to avoid congestion in networking so as to save battery of smartphones while driving
2. Detection and recognition of urban road markings using images [2]
For this paper an algorithm is used in the urban photos to detect and classify crosswalks and arrows. This algorithm is tested on a database containing high-resolution, real-world images with a non-negligible number of difficult cases. The findings indicate that 90% of crosswalks have been found and 78% of arrows. The steps of the proposed algorithm include extraction of marking pixels, detection using connected components before mapping the inverse perspective, recognition based on comparison with a single pattern or repetitive rectangular pattern.
3. Free space and speed humps detection using lidar and vision for urban autonomous navigation [3]
In this paper an outdoor laser sensor is used to present a free space detection device. The system focuses on the identification of speed bumps and for this mission, a zebra crossing detection system is required to verify the existence of speed bumps according to Spanish normative. Real time constraint is one of the most important constraints. This software needs to operate at 50 fps, and the system can operate at 154 fps, so it looks for a fast detection system.
4. A Novel Technique for Dead End and Bump Detection in Indian Road Images Using Color Segmentation and Knowledge Base Object Detection [4]
In this project the road dead ends, sharp turns, and bumps can be detected. The technique is such that it separates the road portion from the rest of the picture, detects the end point of the road using the properties of edge and texture and analyses the end points that are at the far end of the image or much closer. The closer ending of the roads are additional thresholds to detect the dead ends. Bumps are detected by extracting the horizontal profile of the roads and by estimating the horizontal profile volume. Using digital camera from a moving SUV running at a speed of 30 km/h, device is checked against photographs of the roads taken across various parts of India.
5. Vision-Based Robust Lane Detection and Tracking in Challenging Conditions [5]
The document "Vision-Based Robust Lane Detection and Tracking in Challenging Conditions" presents a novel lane detection and tracking method for advanced driver assistance systems (ADAS) and intelligent transportation systems. The proposed method aims to address the challenges of detecting lane markings in adverse weather conditions and challenging environments, such as low visibility, obscured lane markings, and occlusion. The research introduces a comprehensive intensity threshold range (CITR) to improve the performance of the canny edge detector in detecting different types of lane edges, including colored, eroded, or blurred lane edges.
Additionally, it proposes a two-step lane verification technique using angle-based geometric constraints (AGC) and length-based geometric constraints (LGC) to verify and prevent incorrect lane detection. Furthermore, a novel lane tracking technique is introduced to predict the lane position of the next frame by defining a range of horizontal lane position (RHLP) along the x-axis.
IV. EXISTING GAPS
- Variability in Road Conditions: CNN models trained on specific road conditions may struggle when faced with variations such as different weather conditions, lighting, road surface types, and environmental factors. Adapting to these variations is crucial for real-world deployment
- Limited Generalization: CNN models might have difficulty generalizing well to diverse road scenarios, particularly if the training data is not representative of all possible situations. Ensuring a diverse and comprehensive dataset is essential for robust performance..
- Real-time Processing: Autonomous vehicles require real-time processing for lane and speed breaker detection. The computational requirements for running CNN models in real-time on embedded systems with limited resources can be a challenge.
- Dynamic Environments: Roads are dynamic with various moving objects such as vehicles, pedestrians, and animals. The CNN model needs to distinguish between the road markings or speed breakers and other dynamic elements, requiring sophisticated object detection and segmentation..
- Dynamic Environments: Roads are dynamic with various moving objects such as vehicles, pedestrians, and animals. The CNN model needs to distinguish between the road markings or speed breakers and other dynamic elements, requiring sophisticated object detection and segmentation..
- Handling Occlusions: Occlusions, caused by vehicles or obstacles partially blocking the view of lanes or speed breakers, can make it challenging for CNN models to accurately detect and interpret the road layout.
V. PROPOSED MODEL
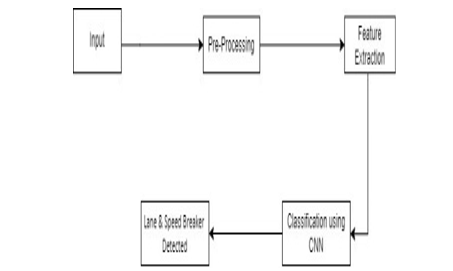
The proposed machine learning (ML) model is designed to detect lane markings and speed breakers in real-time from input video streams captured by onboard cameras in autonomous vehicles. The model follows a systematic data flow process, outlined as follows:
- Input Acceptance: The model accepts input in the form of video streams, providing a continuous feed of the vehicle's surroundings.
- Preprocessing: Preprocessing techniques, including data cleaning and wrangling, are applied to the input video frames to enhance their quality and remove any noise or artifacts.
- Feature Extraction: During preprocessing, important features relevant to lane and speed breaker detection are extracted from the video frames. These features are crucial for accurately identifying lane markings and speed breakers while discarding irrelevant information.
- Classification using CNN Algorithm: The extracted features are fed into a Convolutional Neural Network (CNN) algorithm, a deep learning technique renowned for its effectiveness in image recognition tasks. The CNN algorithm analyzes the features and performs classification to identify the presence and location of lane markings and speed breakers in the video frames
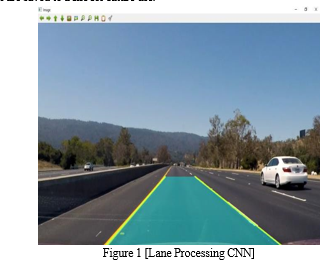
- Lane and Speed Breaker Detection: Based on the classification results obtained from the CNN algorithm, the model identifies and delineates lane markings and speed breakers within the video frames. This information is crucial for autonomous vehicles to navigate safely and make informed decisions in real-time.
VI. METHODOLOGY
The code starts by importing necessary libraries, including Keras for building the model, numpy for numerical operations, matplotlib for visualization, and others. The model architecture follows a Sequential approach, where layers are added sequentially.
The input images are resized to dimensions specified by img_rows and img_cols. The number of channels is set to img_channels. The code then processes the data, including resizing images and converting them to grayscale. The images are saved to the specified paths for further processing. A loop iterates through the images, preparing them for training. The images are loaded, resized, and converted to grayscale before being saved to the destination folder.
The model architecture is defined, consisting of convolutional layers, activation functions, and pooling layers. The model is compiled using the Adam optimizer and categorical cross-entropy loss function. Callbacks are defined for monitoring training progress and saving the best model. Training data is split into training and testing sets using train_test_split.
The model is trained using the fit method, specifying batch size, number of epochs, and validation data. Training history is stored in the hist variable. Performance metrics such as loss and accuracy are evaluated on the test data using the evaluate method. Finally, the model's predictions are generated on the test data, and performance metrics such as classification report and confusion matrix are computed.
Weights of the trained model are saved to a file for future use.
 ???????
???????
References
[1] W. Devapriya; C. Nelson Kennedy Babu; T. Srihari29 February 2016 - 01 March 2016 [Real time speed bump detection using Gaussian filtering and connected component approach] [1] [2] Philippe Foucher; Yazid Sebsadji; Jean-Philippe Tarel; Pierre Charbonnier; Philippe Nicolle [Detection and recognition of urban road markings using images] [2] [05-07 October 2011] [3] C. Fernández; M. Gavilán; D. F. Llorca; I. Parra; R. Quintero;A. G. Lorente; Lj. Vlacic; M. A. Sotelo [Free space and speed humps detection using lidar and vision for urban autonomous navigation] [3] [03-07 June 2012] [4] Dr. Ajit Danti, Smt. Jyoti .Y. Kulkarni, Dr. P.S.Hiremath [A novel technique for dead end and bump detection in Indian Road Images using Color Segmentation and Knowledge Base Object Detection] [4] [, Volume 4, Issue 8, August 2013] [5] SAMIA SULTANA 1, BOSHIR AHMED2, MANORANJAN PAUL 3, (Senior Member, IEEE),MUHAMMAD RAFIQUL ISLAM 1 , AND SHAMIM AHMAD 4 [Vision-Based Robust Lane Detection and Tracking in Challenging Conditions][5][, date of current version 11 July 2023.] [6] 1Manikandan B, 2M. Bharathi [SPEED BREAKER DETECTION USING BLOB ANALYSIS] [Volume 118 No. 20 2018, 3671-3677] [7] Martins Irhebude, Oladimeji Adeyemi, Adeola Kolawole Speed Breakers, Road Marking Detection and Recognition Using Image Processing Techniques [October 2019Advances In Image and Video Processing 7(5):30-42] [8] Abdulhakam.AM.Assidiq, Othman O. Khalifa, Md. Rafiqul Islam, Sheroz Khan [Real Time Lane Detection for Autonomous Vehicles] [ May 13-15, 2008 Kuala Lumpur, Malaysia] [9] Zahid Hasan1, Samsoon Nahar Shampa2, Tasmia Rahman Shahidi3, and Shahnewaz Siddique4 [Pothole and Speed Breaker Detection Using Smartphone Cameras and Convolutional Neural Networks] [2020 IEEE Region 10 Symposium (TENSYMP), 5-7 June 2020, Dhaka, Bangladesh] [10] MUHAMAD ZESHAN ALAM 1,2, SOUSSO KELOUWANI2, JONATHAN BOISCLAIR2 ,AND ALI AKREM AMAMOU2 [Learning Light Fields for Improved Lane Detection] [date of current version 2 January 2023.] [11] Gurpreet Singh , Rajeev Kumar , Poonam Kashtriya [Detection of Potholes and Speed Breaker on Road] [2018 First International Conference on Secure Cyber Computing and Communication(ICSCCC)] [12] Rekha B.N*1, Nafisa*2, Yashaswini Kumar*3, Nirupama Thoudam*4, Unity Chachei*5 [SPEED BREAKER DETECTION ANDSPEEDREDUCTIONUSINGMACHINELEARNING][Volume:02/Issue:07/July -2020
Copyright
Copyright © 2024 Arjun Bhandari, Shivani Sakore, Shantanu Kale. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61362
Publish Date : 2024-04-30
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online