

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Development of a Manual Controlled Mobile Robot for Inspection of Cracks in Storm Sewer Using Machine Learning
Authors: Prof. Y. R. Ingole, Chaitanya V. Kute, Aditi P. Mate, Srushti S. Thorat
DOI Link: https://doi.org/10.22214/ijraset.2024.60538
Certificate: View Certificate
Abstract
The aim of this study is to develop a \"Design and Development of a Manually Controlled Mobile Robot for Inspection of Cracks in Storm Sewers using Machine Learning\" with the objective of mitigating human involvement in labour-intensive and hazardous environments. Storm sewers often present challenging conditions for inspection, including toxic chemicals, fluids, and narrow or inaccessible spaces that are unsafe for human entry. These conditions necessitate the use of robots to conduct inspections and identify cracks and blockages within the sewer system. The proposed model is an in-pipe inspection robot designed specifically for storm sewers. This robot offers exceptional mobility within horizontal pipes, capable of traversing in forward direction efficiently. Equipped with advanced camera systems, the robot can detect cracks and blockages in real-time. Additionally, it provides remote access to inspection data via various interfaces such as mobile phones, smartphones, or other smart devices, allowing operators to monitor the inspection process in real-time from a safe distance.
Introduction
I. INTRODUCTION
The maintenance of Sewers is essential for ensuring the safety, reliability, and longevity of the infrastructure. Regular inspections play a crucial role in identifying potential hazards such as blockages, leaks, or structural deficiencies, which could lead to system failures and flooding. Timely detection and mitigation of these issues help protect public safety, prevent property damage, and minimize the environmental impact of Sewer water runoff. Moreover, compliance with regulatory requirements is paramount in Sewer maintenance.
Regulatory agencies often mandate municipalities and utility operators to conduct routine inspections to uphold safety, environmental, and industry standards. Adherence to these regulations not only prevents accidents and environmental harm but also fosters public confidence in the reliability and safety of Sewer operations. Furthermore, Sewer inspections contribute to effective risk management and environmental protection. Sewers transport rainwater and runoff, and inspections help prevent pollution, spills, or other incidents that could harm ecosystems and public health. By identifying vulnerabilities and implementing risk mitigation measures, operators can safeguard communities Furthermore, Sewer inspections contribute to effective risk management and environmental protection.
In recent years, mobile robots have emerged as valuable tools for Sewer inspection and maintenance efforts. These robots offer efficient and precise inspection capabilities in challenging environments, including narrow Sewer pipes and hazardous conditions. Their ability to integrate electronic components such as sensors, cameras, and lighting systems enhances their effectiveness in detecting and assessing potential issues within Sewer systems.
This adaptability is particularly beneficial in addressing the diverse challenges posed by Sewer infrastructure, ultimately contributing to the resilience and sustainability of Sewer water management practices. considerations arising from the nature of the project will be addressed to guide the subsequent sections of the research paper effectively.
II. DESIGN AND SIMULATON
A. Chassis Design
The chassis serves as the structural framework of the robot, providing support and housing for all its components. The design of the chassis is critical for ensuring stability, durability, and maneuverability within the confined space of Sewer pipelines. In this case, Fusion 360 software was utilized to create a CAD model of the chassis, allowing for precise design and customization.
B. Four-Wheeled Rover Configuration:
The decision to implement a four-wheeled rover configuration offers several advantages. Firstly, having four wheels enhances stability, ensuring that the robot maintains balance and traction even on uneven surfaces or when encountering obstacles within the Sewer pipeline. Additionally, the four-wheeled design allows for better weight distribution, minimizing the risk of tipping or tilting during operation. Moreover, having four wheels provides redundancy and ensures continued operation even if one or more wheels encounter issues or obstacles.
C. Symmetric Body Structure:
The symmetric body structure of the robot contributes to ease of control and manoeuvrability. By maintaining symmetry, the robot's movement remains predictable and consistent, facilitating precise navigation through the Sewer pipeline. Furthermore, a symmetric design simplifies the control interface for operators, allowing for intuitive and efficient remote control of the robot's movements.
D. Remote Control Capability
The Sewer Inspection Robot is designed to be controlled remotely, enabling operators to navigate it through the Sewer pipeline from a safe distance. This remote-control capability is essential for ensuring operator safety and facilitating precise navigation through the complex network of Sewer pipes. Integration with remote control systems allows operators to steer the robot, adjust its speed, and activate various functions such as camera operation or obstacle avoidance.
E. Stability Purposes
Stability is paramount in the design of the Sewer Inspection Robot, especially considering the challenging environment of Sewer pipelines. The four-wheeled rover configuration, coupled with a sturdy chassis design, enhances the robot's stability, minimizing the risk of tipping or getting stuck during operation.

III. PRE-FABRICATED MODEL SELECTION
A. Volume Considerations
- Volume of Motor: 207.36 cm/cu
- Volume of Battery: 136.7 cm/cu
- Volume of ESP32 CAM Wi-fi module: 28.35 cm/cu
- Volume of Controller: 108 cm/cu
- Least volume considerations for chassis: 1396.64 cm/cu
- Least Length of the rover: 4(motor’s breadth) + 4(motor’s breadth) + 4.5(battery’s breadth) + 1.7(controller) = 17.2 cm=172mm
- Least Breadth of the rover: 4(motor’s length) + 4(motor’s l. l length) + 6.5(battery’s length) = 14.5 cm=145mm
- Least Height of the rover: 5.6 cm = 56mm (According to the highest component in our rover which is battery)
B. Material Consideration
The choice of material for the chassis of the Sewer Inspection Robot is pivotal, directly influencing its performance, durability, and cost-effectiveness. We explored the rationale behind selecting plastic, specifically ABS (Acrylonitrile Butadiene Styrene), over other materials such as Polycarbonate.
C. Material Characteristics
Plastic materials, including ABS and Polycarbonate, offer several advantageous characteristics that align with the requirements of the Sewer Inspection Robot:
- Lightweight and Durable: Both ABS and Polycarbonate are lightweight and durable, essential for ensuring the agility and longevity of the robot in Sewer environments.
- Non-Conductive and Water-Resistant: Plastic materials are non-conductive and exhibit excellent water resistance, crucial properties for ensuring safety and reliability in moist or wet Sewer pipelines.
- Cost-Effectiveness: Plastic, particularly ABS, offers a cost-effective solution for constructing the robot chassis while providing the necessary strength and durability required for the project.
IV. RATIONALE FOR CHOOSING PLASTIC (ABS)
After thorough consideration of material characteristics and project requirements, ABS emerged as the optimal choice for the Sewer Inspection Robot chassis. Here's why: such as Polycarbonate.
A. Cost Effectivenes
ABS is generally more cost-effective compared to Polycarbonate, aligning with budget constraints without compromising on performance.
B. Ease of Processing
ABS is easier to process and work with, particularly in injection molding and extrusion processes, streamlining manufacturing and assembly.
C. Ease of Processing
ABS offers a good balance of toughness and rigidity, ensuring resilience to impacts and mechanical stresses encountered in Sewer environments.
D. Ease of Processing
ABS exhibits natural UV resistance, a beneficial property for applications exposed to sunlight or outdoor conditions, enhancing durability.
V. EVALUATION OF PRE-FABRICATED CHASSIS FOR SEWER APPLICATION
A. IP Rating:
The IP65/IP67 rating ensures that the chassis is dust-tight and protected against water ingress, making it suitable for outdoor or harsh environments typical in Sewer applications. This level of protection ensures the longevity and reliability of the equipment even in challenging conditions.
B. Dimensions
The dimensions of 200*155*80 mm provide a compact yet spacious enclosure for accommodating essential components while ensuring ease of installation within Sewer infrastructure.
C. Material
Constructed from durable and weather-resistant materials, the chassis offers robust protection against environmental factors commonly encountered in Sewer environments, such as moisture, temperature fluctuations, and corrosive agents.
D. Enclosure Type
The enclosed housing design provides comprehensive protection against dust, water, and other environmental factors, safeguarding sensitive components from damage or malfunction.
E. Mounting Options
The availability of various mounting options, including wall mounting, pole mounting, or direct installation, offers flexibility in deployment, allowing for seamless integration into existing Sewer infrastructure.
F. Temperature Range
With an operating temperature range of -40°C to +85°C, the chassis can withstand extreme temperatures often experienced in Sewer systems, ensuring reliable performance under challenging conditions.
G. Certifications
Compliance with relevant industry standards and certifications guarantees the safety, reliability, and performance of the chassis in Sewer applications, providing peace of mind to users and stakeholders.
H. Sealing
The sealed construction with gaskets or seals ensures effective ingress protection, preventing water, dust, and debris from compromising the internal components, thereby enhancing the longevity and reliability of the equipment.
VI. CONTROL SYSTEM
A. Camera Control
- The ESP32-CAM module features a built-in camera sensor and is capable of capturing images or streaming video.
- As a microcontroller, the ESP32-CAM can interface with the camera sensor, initialize it, capture images or video frames, and process the data as needed.
- It is also handling tasks such as image processing, encoding, and transmission over Wi-Fi.
B. Communication through Wi-Fi
- The ESP32-CAM module comes with built-in Wi-Fi capabilities, allowing it to connect to a Wi-Fi network and communicate with other devices.
- As a microcontroller, it can establish Wi-Fi connections, handle data transmission and reception, and implement communication protocols such as HTTP, MQTT, or WebSocket.
- It acts as a web server, allowing remote access to the camera feed or control interface through a web browser or a custom application.
???????C. Motor Driver Control (L293D)
- The ESP32-CAM can control external hardware components such as motors using GPIO pins.
- The L293D motor driver is commonly used to interface with DC motors or stepper motors. It provides H-bridge functionality, enabling bidirectional control of motors.
- As a microcontroller, the ESP32-CAM can send signals to the L293D motor driver to control the direction and speed of the motor connected to it.
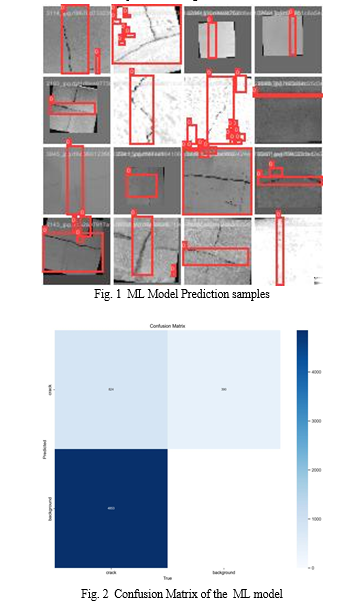
VII. CRACK DETECTION ALGORITHM
A. Data Collection and Pre-processing
Gather a dataset of images containing cracks and non-crack surfaces. Ensure that the dataset represents various types of cracks, lighting conditions, and backgrounds. Preprocess the images by resizing, normalization, and possibly augmenting them to increase the diversity of the dataset.
B. Labelling
Annotate the images to indicate where the cracks are located. This can be done by drawing bounding boxes around the cracks or by creating segmentation masks.
C. Split Dataset
Divide the dataset into training, validation, and testing sets to evaluate the performance of the algorithm properly.
D. Model Selection
Choose a suitable model architecture for crack detection. We have preferred to use Ultralytics Yolov8 Module’s architecture for crack detection.
E. Training
Train the selected model on the annotated dataset. This involves feeding the images into the model and adjusting the Yolo model's parameters (weights) based on the difference between predicted and ground truth crack locations.
VIII. ACKNOWLEDGMENT
We hereby take this opportunity to express our sincere thanks to deep sense of gratitude to our guide Prof. Y. R. Ingole for his kind co-operation and encouragement towards us during this project. This project wouldn’t be possible without his motivation and ever-increasing support. His curiosity, dedication and enthusiasm about the project made this project a success.
We would like to express sincere gratitude to Prof. Y. R. Ingole, Head of Robotics & Automation Engineering Department for believing in us and nurturing our ideas. We would also like to thank Prof. P. P. Chakraborty, (Project Coordinator) for his support, help & cooperation provided for the Project work.
We would like to thanks Prof. Dr. A. M. Kate, Principal, Zeal College of Engineering & Research. We would like to thanks the teaching as well as non-teaching staff of Robotics & Automation Engineering Department for their support. We also acknowledge with thanks, assistance provided by central library staff.
Last, but not least, We would like to thank all my colleagues, friends and most importantly our parents for their valuable co-operation and who believed in us and supported us in their own ways.
Conclusion
The selection of plastic, specifically ABS, for the construction of the Sewer Inspection Robot chassis is justified by its cost-effectiveness, ease of processing, toughness, and suitability for project requirements. ABS offers a pragmatic solution that ensures optimal performance, durability, and cost-effectiveness, addressing the challenges posed by Sewer environments effectively.
References
[1] Amr Bekhir, Abbas Dehghani, Robert Richardson (2012) - “Kinematic Analysis and locomotive strategy of a pipe inspection robot concept for operation in active pipelines”, International Journal of Mechanical Engineering and Mechatronics. [2] E Navin Prasad, M Kannan, A Azarueen and N Karuuppasamy (2012)- “Defect Identification in pipe lines using pipe inspection robot.”, International Journal of Mechanical Engineering and Robotics Research. [3] Atul Gargade, Dhanraj Tambuskar, Gajanan Thokal (2013.)- “Modelling and Analysis of Pipe Inspection Robot”, International Journal of Emerging Technology and Advanced Engineering ISO 9001:2008 Certified Journal. [4] Edwin Dertien, Stefano Stramigioli, Kees Pulles (2011)- “Development of an inspection robot for small diameter gas distribution mains”, IEEE International Conference on Robotics and Automation, ISBN 978-1-61284-386-5. [5] Jaspreet Singh, Tajinder Singh (2015)-” Investigation of Design & Fabrication of In-Pipe Inspection Robot”, International Journal on Mechanical Engineering and Robotics, ISSN 2321-5747, Volume3 [6] Hanaa Said Salim Al-Hajry and G. R. Rameshkumar (2013) - “Design and Testing of Pipeline Inspection Robot”, International Journal of Engineering Innovation & Research ISSN: 2277-5668. [7] Hyouk Ryeol Choi and Se-gon Roh (2007)- “In-pipe Robot with Active Steering Capability for Moving Inside of Pipelines”, Bio Inspiration and Robotics: Walking and Climbing Robots, ISBN: 978-3-902613-15-8: Page number- 376-402. [8] V. Sharmiladeve, S. Ravi Prakash (2015)- “Embedded Based in Pip Inspection Vehicle”, International Journal of Advanced Research in Computer Engineering & Technology. [9] Robin Badbeer, Stephen Harrold (1997) - “An underwater robot for pipe inspection”, Mechatronics and Machine Vision in Practice, ISBN: 0-8186-8025-3.
Copyright
Copyright © 2024 Prof. Y. R. Ingole, Chaitanya V. Kute, Aditi P. Mate, Srushti S. Thorat. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET60538
Publish Date : 2024-04-18
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online