

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Development of Agri-bot for Autonomous Seed Sowing and Harvesting
Authors: Prof. Bikesh Kumar, Prajwal NIkure, Khushi Naik, Aniket Chavan, Srushti Bagawe
DOI Link: https://doi.org/10.22214/ijraset.2024.60474
Certificate: View Certificate
Abstract
This research delves into the development of an Autonomous Agriculture Robot (AAR) capable of performing seed sowing and harvesting operations. The AAR operates in two distinct modes: seed sowing and harvesting, leveraging advanced sensors and a control system to automate these critical agricultural processes. The AAR is engineered with dual operational modes, facilitated by an encoder system for precise autonomous navigation, servo actuation for operational control, and a Battery Management System (BMS) for efficient power usage. This paper details the design and development of a hardware prototype that presents the integration of these technologies. Validation results demonstrate the AAR’s capability to autonomously navigate and perform the defined tasks. The implementation of the AAR prototype signifies a pivotal step towards automating manual agricultural processes, potentially transforming the agricultural landscape by reducing labour requirements and increasing efficiency.
Introduction
I. INTRODUCTION
Farmers are increasingly relying on machinery to reduce manual labour and boost crop yields. Various machines are available for ploughing, harvesting, and pesticide spraying, but they require manual operation and often serve specific functions. The investment in these machines often yields meagre returns in terms of output and profitability. Moreover, the world's growing population, projected to reach 9 billion in 35 years, poses a significant challenge in terms of food production. Automation presents the ideal solution to these issues by developing machines that perform multiple tasks autonomously, leading to large-scale yield increases. Agriculture, humanity's oldest and enduring economic activity, provides essential elements for our survival, including food, feed, fibre, and fuel. The current trend in agricultural robot development focuses on creating intelligent and efficient machines that reduce farming expenses while expanding capabilities and enhancing quality. Developing a robot capable of automated ploughing and seeding, manually guided by the farmer and capable of stabilizing environmental humidity, holds immense potential. Robotics and automation can play a pivotal role in addressing the growing demand for agricultural production. Autonomous machines promise increased safety, consistency, and efficiency in plant agronomy. By employing robots, farmers can perform tasks like irrigation, mechanical weed control, and farm surveillance, reducing environmental impact and enhancing precision farming practices.
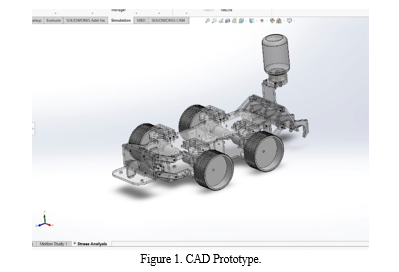
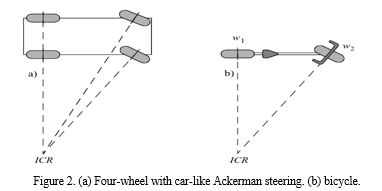
A. Mobility
The kinematic mobility of a robotic chassis is defined by its inherent capacity for direct motion within a given environment. A fundamental limitation to this mobility is imposed by the sliding constraint, which mandates that each wheel must adhere to specific movement parameters to ensure proper traction and control. for immediate kinematic motion, a mobile robot possesses the capability to adjust its positioning over time via the actuation of steerable wheels. The comprehensive maneuverability of such a robot is a synthesis of the inherent mobility afforded by the kinematic sliding constraints of the non-steerable wheels, augmented by the supplementary degrees of freedom introduced through the actuation and rotation of the steerable wheels. Instantaneous center of rotation (ICR).[1]
II. SENSOR INTEGRATION
Proprioceptive sensors are integral to the robot’s internal system monitoring, providing real-time data on parameters such as motor velocity, axial wheel load, articulation angles of robotic limbs, and the state of the power supply. Conversely, exteroceptive sensors serve to gather external environmental data, encompassing metrics like proximal distances, photometric intensities, and acoustic pressure levels. The robot employs these exteroceptive measurements to discern and characterize salient environmental attributes, thereby facilitating informed interaction with its surroundings.[3]
Passive sensors are devices that quantify the ambient energy present within the environment, without the emission of any signal. Common examples of such sensors include thermometric probes, acoustic detectors, and optical imaging devices like Charge-Coupled Devices (CCD) or Complementary Metal-Oxide-Semiconductor (CMOS) cameras. In contrast, active sensors proactively emit energy into the environment and measure the resultant interaction. This active engagement often results in enhanced performance due to the controlled conditions of the interaction. Nonetheless, the deployment of active sensors is not without its challenges. The emitted energy has the potential to alter the very environmental properties under measurement. Additionally, there exists the risk of signal interference, either from similar devices in proximity or from other active sensors on the same robotic platform, which may compromise the integrity of the data collected. Notable examples of active sensors include rotational encoders for wheel movement, ultrasonic distance sensors, and laser-based measurement systems.[2][3]

III. SEED SOWING MECHANISM
The seed sowing mechanism is one of the important function in the agriculture robot. In the project , typically a disc-operated seed sowing mechanism is used for effective sowing operation. A disk-operated seed sowing mechanism typically involves a rotating disk with evenly spaced holes or compartments designed to hold seeds.
In this seed sowing mechanism, two discs are arranged vertically, with one positioned above the other. The lower disc rotates and is aligned with a series of holes in the plate above it. These holes are strategically positioned to facilitate the dropping of seeds. Motion of disc is synchronized and controlled by using N20 dc gear motor of 10 rpm for consistent seed distribution across the field. The seeds are present in hopper below which the two disc or plates are aligned. As the disk rotates, seeds are dropped or placed into the holes, and as the disk continues to turn, the seeds are released at predetermined intervals and depths into the soil. A flexible tube or piping is used for seed dropping integrated into seed sowing mechanisms to facilitate precise seed placement. As the lower disc rotates, seeds are fed into the compartments or openings on its surface. Simultaneously, the alignment of the rotating disc with the holes in the upper plate allows seeds to drop through these holes at proper intervals.[7]
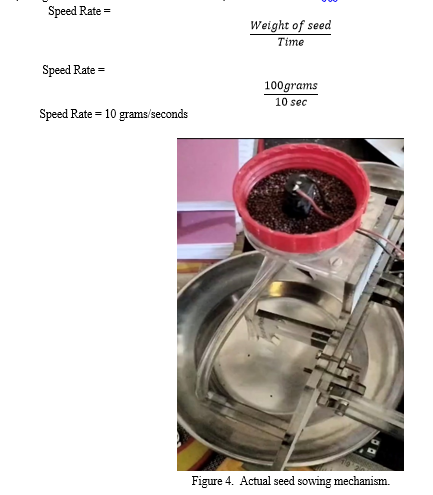
Calculations:
Mustard seeds are the small round seeds of various mustard plants. The seeds are usually about 1 to 2 millimetres (0.039 to 0.079 in) in diameter and may be colored from yellowish white to black.
The speed rate is typically calculated by dividing the weight of seeds by the time taken to sow those seeds.
Overall, 100 grams of seeds are sown in 10 seconds, the calculation will be,[8]
IV. PROGRAMMING
The Functions to control the movement or operation performed by the robot were programmed into the ESP32 microcontroller using the Arduino IDE. we have used three ESP32, each performed the specific functions or operations in robot, here we have used the ESP-WIFI-MESH as a networking protocol that allows multiple ESP-devices to be connected under a single WLAN. we define parameters for setting up a mesh network such as the network name, password, and port, Libraries we used are, as following "Adafruit_Sensor","painlessMesh", "Arduino_JSON", and "Servo.h" for handling sensors, mesh networking, JSON parsing, and servo motor control.
In Esp32(1) we have programmed it for the "johnson dc motor" which are used for the movement ,in this program we have defined all GPIO pin , this pin are likely to use to control the motion of motor , direction and the speed of the motor ,we have also define the variables for example ("int pEN1count") to store the previous state of digital input , also define for another variable for the current state of digital inputs("cEN1count"), some variables that we used in program are "incomingTurn", "incomingDirection" , "incoming Speed" they are used for the specific function as to control the turning , direction , speed of the motors. comeing to the main part of the program, the function is define named as "void control direction()" in which the getDistance() is called. in the getDistance() function: If node1 is 0, it sets incomingDirection to 0. If node1 is greater than 10 and less than 20, it subtracts 10 from node1 and assigns the result to incoming Direction. here in void.[11][12]
Control direction() if- else condition is used to control the movement of motors moving forward or backward , here user input is created as the name of "node1" if the condition match it will act accordingly , now the other function is define in which the encoder signals are read , update the count for the each encoder channel after reading the digital signal from the encoder channels it update the current count variable(" cEN1count", "cEN2count", "cEN3count", and "cEN4count") .if the current count is different from the previous count("pEN1count", "pEN2count", "pEN3count","pEN4count") if there is a change , then the current count is increments the corresponding cumulative count ("EN1", "EN2", "EN3", "EN4") after this previous count get updated with the current count values for the next iteration. Finally, it calculates the average count for the left and right encoders by takin the count of their respective channel and divide it by two.[14]
Conclusion
In conclusion, the development and implementation of autonomous Agri-bots have demonstrated numerous benefits and potential for transforming the agricultural industry. These advanced robotic systems offer increased efficiency, accuracy, and productivity in various farming tasks, from planting and monitoring to harvesting and maintenance. The use of sensors, and IoT technology enables Agri-bots to navigate through fields, analyze data, take informed decisions, and carry out agricultural operations with minimal human intervention. Autonomous Agri-bots have the potential to address several challenges facing modern agriculture, such as labor shortages, rising production costs, and environmental sustainability. By automating repetitive, labor-intensive tasks, farmers can optimize their operations, reduce operational costs, and minimize reliance on manual labor. Additionally, the precise application of resources, such as seeding and harvesting helps conserve resources, minimize waste, and reduce the environmental impact of farming practices. . The successful adoption of autonomous Agri-bots requires adequate training and support for farmers to ensure a seamless integration into existing farming practice.
References
[1] Introduction to Autonomous Mobile Robots, Roland Siegwart and Illah R. Nourbakhsh. Mobile Robot Manoeuvrability. [2] Introduction to Autonomous Mobile Robots, Roland Siegwart and Illah R. Nourbakhsh. Mobile Robot Workspace. [3] Introduction to Autonomous Mobile Robots, Roland Siegwart and Illah R. Nourbakhsh. Sensors for Mobile Robots. [4] http://www.mobilerobots.org [5] http://www.eagri.org/eagri50/FMP211/lec08.html [6] https://www.aciar.gov.au/sites/default/files/legacy/node/714/Part 3 MN121.pdf [7] https://farmer.gov.in/dacdivision/Machinery1/chap2a.pdf [8] https://farmech.dac.gov.in/FarmerGuide/PB/Sowing%20Equipments.htm [9] https://www.open-std.org/Jtc1/SC22/wg21/docs/papers/2004/n1666.pdf [10] https://medium.com/geekculture/modern-c-with-esp32-dcd3918dd978 [11] https://embeddedtutorials.com/eps32/esp32-wifi-cpp-esp-idf-station/ [12] https://randomnerdtutorials.com/esp32-dc-motor-l298n-motor-driver-control-speed-direction/ [13] https://dronebotworkshop.com/esp32-servo/ [14] https://randomnerdtutorials.com/esp32-useful-wi-fi-functions-arduino/
Copyright
Copyright © 2024 Prof. Bikesh Kumar, Prajwal NIkure, Khushi Naik, Aniket Chavan, Srushti Bagawe. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET60474
Publish Date : 2024-04-16
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online