

Ijraset Journal For Research in Applied Science and Engineering Technology
Development, Simulation and Visualization of Autonomous Farm Vehicles
Authors: K. Pragnan Reddy, Dr. M. Sreenivasa Rao
DOI Link: https://doi.org/10.22214/ijraset.2024.58489
Certificate: View Certificate
Abstract
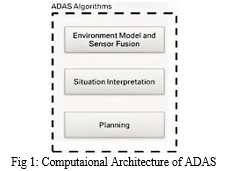
A Research in Autonomous Agricultural Vehicle Technology is presented. With the coming of the Smart Farming Revolution the development of more complicated machines has begun. Agricultural machines are made with the capability of driving themselves, using GPS maps and electronic sensors, an approach that will lead to the development of futuristic Precise Autonomous Farming Systems. The basic issues to be addressed are autonomous path planning, obstacle detection and avoidance for which various sensors will be employed such as GPS, laser-based sensors, ultrasonic sensors, IMU sensors and Camera sensors whose data has to be constantly monitored using Dead Reckoning algorithm and constant Pose Estimation. In these sensors, Camera, Ultrasonic, Laser-Based Sensors are used as Detection sensors while the IMU and GPS sensors are used as Localization sensors. Global Avoidance Subsystem which examines the whole environment of an autonomous vehicle mission-level path planner that pre-plans paths around all known obstacles. While Local Avoidance Subsystem/Reactive planner consists of an obstacle filter and an obstacle avoidance algorithm and re-plans a short way for the vehicle to navigate. With the ROS framework and all sensors data, a vehicle can guide itself through an unknown environment. This will help the farmer to undercut the labour shortage and improve the precision in farming which in turn improves the output to meet the growing demands.
Introduction
I. INTRODUCTION
Human civilization flourished with the rise in prominence for agriculture before which we were nomads. In the present scenario the number of farmers tend to decrease due to unfavourable climate and environmental changes, increase in labour cost etc.,. To meet the ever increasing demand the future of farming should be more revolutionary. This is where we can implement precision and smart farming. It has opened an era in which powered machinery does the work formerly performed by people and animals.With the coming of the Smart Farming Revolution the development of more complicated machines, farming methods took a great leap forward. In the foreseeable future, some agricultural machines may be made capable of driving themselves, using GPS maps and electronic sensors, an approach that will lead to the development of future Precise Autonomous Farming Systems. Autonomous machinery will form the backbone of future autonomous farming systems.Hence the need to develop autonomous farming systems that deploy unmanned sensing and machinery systems with the possibility of centralized Tele-Supervision, will be increased. This will help the farmer to undercut the labour shortage and improve the precision in farming which in turn improves the output to meet the growing demands. Robotics will offer solutions in precision agriculture to procedures related to fertilizers and pesticides applications, harvesting, seeding, weed control etc. to improve efficiency and productivity. In the present generation most of the nations do not have adequate skilled manpower in the farming sector and it influences the development of countries. So it’s essential to robotize the sector to overcome this problem. In India there are 70% people reliant on various agribusinesses. Robotics has made most of its progress to date in the realm of modern assembly line.Robot arms, or manipulators, include a 2 billion dollar industry as of 2017. Bolted at its shoulder to a specific position in the assembly line, the robot arm can move with incredible speed and precision to perform tedious assignments, for example, spot welding and painting. The problem with this type of robots is they are fixed to a single location (Lack of Mobility). The fixed manipulator has a limited range of motion which depends on the point of coordinates where it is fixed which make it unfit for farms as the robot needs to move around the farm and work in harmony with nature.Conversely, a mobile robot which is capable of it own locomotion, would have the option to go all through the assembling plant, deftly applying its abilities at the place of requirement.
Basically mobile robots are of two types :
AMR - Autonomous Mobile Robot
AGV - Autonomous Guided Vehicle
Mobile robots which are "independent" (self-sufficient robot) which means they are equipped with various sensors for exploring an uncontrolled environment without the requirement for physical or Electro-Mechanical guidance devices are known as Autonomous Mobile Robot (AMR).
Mobile robots which depend on guidance devices that enable them to travel a predefined guide path in generally controlled space are known as Autonomous Guided Vehicle (AGV). In this robot the sensors are located outside the robot like on the workshop floor.
In this presentation, work is done upon Autonomous Mobile Robot (AMR)
Three main characteristics of AMR are
- Mobility: Total mobility of the Robot relative to the environment.
- Autonomy: Minimal human interaction.
- Perception: The ability of sensing and reacting to the environment.
Agribot is a robot intended for farming purposes. In the near future scope for developments in robotization and automation of agricultural machinery is increasing. All chances of making an agricultural robot are researched and developed to implement them in agricultural fields in many countries. Currently huge advances are being made in the area of self driving cars by every major Tech and automobile company, but only few of the companies are extending their research to the Agricultural sector. With no constantly changing environment like pedestrians and moving vehicles, developing an Autonomous Farm-bots are much easier.
In the table above there is a brief comparison between labour intensive farming, moderate labour farming and agribot farming.

II. RELATED WORK
According to James Szabo(A Nuffield (UK) Farming Scholarships Trust Report, 2013), “The agricultural robotics in terms of requirements, technology and the inevitable legislation which would be involved with unmanned Robots.The primary focus was to discover how this will influence the regular day to day existence of those included at farm and support levels inside the agricultural sectors. The scope of idea and business undertakings was bewildering: from independent mines working in the remotest parts of Australia to self-driving vehicles in the occupied, in Parma, Italy, apply autonomy and robotization are set to turn out to be a piece of regular day to day existence - and sooner than one may anticipate. In scholastic horticultural applied autonomy inquire about, the essential spotlight was on littler, plant-driven gadgets which could screen and treat individual plant prerequisites through the investigation of Phytotechnology; a term we will hear all the more regularly later on. Simultaneously the customary business makers were concentrating considerations on mechanizing the current horticultural practices, accordingly improving throughput to the detriment of harvest and soil wellbeing”.
As indicated by Marlon G. Boarnet (Ross, 2014, p. 90), an authority in transportation and urban development at the University of Southern California “Around each two decades, we modify the transportation framework in our urban communities in ways that shape the vitality of neighbourhood; the settlement designs in our urban communities and wide open; and our economy, society and culture" and the same number of accept, self-governing driving automobiles are this new enormous change everybody is discussing.
Driving not exclusively to high effect natural advantages, for example, the improvement of mileage (Payre, et al. 2014; Luettel, et al., 2012) , through the streamlining of highways (Luettel, et al., 2012; Le Vine, et al., 2015; Payre, et al., 2014; Hamish Jamson, et al., 2013; Merat, et al.; 2012), the decrease of required vehicles to just 15% of the present requirement (Ross, 2014), and company driving that would spare to 20-30% fuel devour (Weyer, et al., 2015), yet additionally prompting cultural angles, for example, colossal efficiency gains while driving (Le Vine, et al., 2015; Payre, et al., 2014; Hamish Jamson, et al., 2013), decrease on the mishap and loss of life considered as the eight most elevated passing reason worldwide in 2013 (World Health Organization, 2013), stress decrease (RudinBrown and Parker, 2004a; Stanton and Young, 2005), and the decay of parking spot to up to a quarter of the present limit (Alessandrini, et al., 2015). It would likewise, as per an investigation by Morgan Stanley (2013) lead to a normal 38 hours decrease of driving time per individual every year just as sparing the US economy alone 1.3 trillion dollars for each year, making a move on the conceivable outcomes and various applications, growing totally new markets, organizations and conceivable plans of action (Bartl, 2015). That will change the society as we probably are aware it. This is an evidential proof for the future of autonomous vehicles in probable”.
As stated by Ashish Lalwani, Mrunmai Bhide, S. K. Shah(A REVIEW: AUTONOMOUS AGRIBOT FOR SMART FARMING, 2016) “Ever expanding population requires the increased food generation to be expanded which requires better development in the structure of appropriate usage of seeds and composts with least work. The fundamental target of self-ruling agribot is productive usage of assets and to diminish work. It can perform different errands like soil testing, planting of seeds, showering of composts and gathering of natural products. It can gauge the NPK substance of soil utilizing shading testing of concoction arrangement utilizing fiber optic and administer the necessary measure of composts which is important or less in soil. It can delve an opening in soil by drilling mechanisms and plants seed and spread gap by soil once more. It can spray the pesticides utilizing spraying systems. Every single activity are performed by utilizing ARDUINO controller which is master and others are lilypad which are religated to performs explicit activity. By utilizing image processing and mechanical arm the agribot will distinguish fruits on tree and cut the foods grown from the ground it on bushel, such a lot of collecting work should be possible by utilizing Raspberry pi”.
‘AgRo-Bot: An Autonomous Robot’ by Shubham Khandelwal, Neha Kaushik, Sagar Sharma et al., 2017 states that “precision agriculture by agricultural robots is the newly emerging technology in agribusiness. For saving the energy and time that is wasted in monotonous farming tasks automation in farming procedures is very useful. To design these sorts of robots there should be certain contemplation and particular methodology considering the agricultural work in which it will be performing tasks and the working of an autonomous robot is depends on field parameters for example length and width”.
An initial outcome from ‘Agricultural Robots – Applications and Economic Perspectives’ by Pedersen S. M, Fountas S and Blackmore S et al., 2008, shows that “most of the autonomous systems are more easy to use for different procedures than conventional systems and will lower labour costs and restrictions of daily working hours significantly. Moreover, it will possible to replace the most important monotonous work with autonomous systems although some routines are not possible to automate due to the required correctness of the specific works. In addition, at this stage of development, the initial investments and annual expenses for bit costly GPS systems are still high but it seems possible to design cost effective robotic systems for crop scouting, grass cutting and autonomous weeding”.
In ‘A REVIEW: AUTONOMOUS AGRIBOT FOR SMART FARMING’ ASHISH LALWANI, MRUNMAI BHIDE, S. K. SHAH et al., 2016 “Have to develop this autonomous Tractor with multi-tasking features, it will overcomes the difficulty of farmers in agricultural tasks, the agricultural land irrespective of season, the weather of that day. After examining various situations, the tractor is integrated with various sub modules can are utilized for agricultural purposes across the world particularly countries like India where agriculture provides major source of income for the more than 70% Indian population.”
The journal ‘State of the art of autonomous agricultural off-road vehicles driven by renewable energy systems’ Amin Ghobadpourab, Loïc Boulonb ,Hossein Mousazadeha , Ahmad Sharifi Malvajerdic , Shahin Rafiee et al., 2019 states “some limitations which are: (a) work spaces are large, (b)low cost systems are required, (c) the dependency on the type of operation, (d) ground surfaces can change daily, and (e) environmental conditions (rain, fog, and dust) may affect sensor observations”.
III. METHODOLOGY
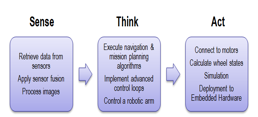
A Truly Autonomous Robot is the one which could perceive its surroundings using sensors, make critical analysis based on the sensor data and programmed to make an patterns and the act according to the pattern within the environment.
In this project the main focus is autonomous movement of the Farm-bot.
For this we need to develop the two main functions of autonomy.
- Obstacle Detection and Avoidance
- Autonomous Path Planning
Firstly we discuss about why the detection sensors are so vital to autonomous vehicles. The microprocessor takes the spot of the brain (Controller). Analysis of complex algorithms and programs take the place of decision-making, actuators replace feet to move the vehicle or stop by brake, and hands which control steering.Sadly, the most significant element of an individual is the hardest to imitate, The capacity of an individual to see visually and take in such a great amount information with his eyes is vital. Without visual information the microprocessor crunches the complex algorithms and programs aimlessly. This may be fine on plain surface but the vehicle may actually be travelling on perilous terrain. This is the greatest constraint for self-driving vehicles, with no perfect arrangement of sensory system.
ROS does deliver a perfect arrangement of sensory system. Robot Operating System (ROS or ros) is the robotics middleware which means it is the collection of software frameworks for robot software development. ROS is an open-source. As the name suggests it is not an Operating System but a “Meta-Operating System”. Which means it provides all the usual services of an Operating System like message-passing between processes, package management, hardware abstraction, low-level device control and implementation of commonly-used functionality. Along with this it also provides libraries and tools for obtaining, building, writing, and running code across multiple computers.
ROS Ecosystem can be separated into three groups:
- Independent tools used for building and distributing ROS-based software.
- Client library implementations such as roscpp, roslisp and rospy .
- Application-related code packages which uses one or more ROS client libraries.
In short The Robot Operating System (ROS) is a flexible framework for writing robot software. It is a collection of tools, libraries, and conventions that aim to simplify the task of creating complex and robust robot behavior across a wide variety of robotic platforms.
For the actuation part as the project is Development & Simulation of Autonomous Farm Robots only the actuation part is replaced by simulation and visualization.
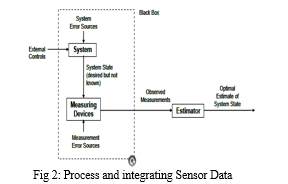
The Development of an Autonomous Farm Bot is done by programming various sensors like Camera Module, Laser Scanner Module, GPS Module, IMU Module, Ultrasonic Module and integrating those modules using Kalman Filters.Sensor Integration refers to intelligently combining information from numerous sources to determine orchestrated data for ensuing handling. An variety of algorithms have been developed for integrating information from numerous sources and representing uncertainties related with the information sources.
Obstacle Detection and Avoidance
As the name suggests it has 2 parts in it.
A. Obstacle Detection:
A range sensor, giving real-time updates of the surrounding environment, performs obstacle detection.
The Obstacle Detection is done by Detection sensors which will be integrated using Kalman Filters for reduced noise from the sensors. All the sensor modules are integrated using “catkin make” command
B. Obstacle Avoidance:
Maneuvers the tractor around known & unknown obstacles. Accomplished through the combination of 2 subsystems Global Avoidance Subsystem (pre-plans paths around all known obstacles) Local Avoidance Subsystem (maneuvers the tractor around unknown obstacles) This part has obstacle filter and an obstacle avoidance algorithm
The Autonomous vehicle has two levels of planning. One level using , Global Avoidance Subsystem which examines the whole environment of an autonomous vehicle mission-level path planner that pre-plans paths around all known obstacles through which the vehicle can travel from one point to the next, avoiding prominent obstacle like wells, rocky terrain etc..,
Obstacle avoidance on a global level is achieved by directing away from potential obstacles. In the event that the vehicle experiences a surprising deterrent during a crucial time, the global planner rethinks the entire map with the additional hindrance and changes either only that bit of the affected path or the remaining of the path dependent on the new map information. This is not just dependent on detection sensors but also predefined maps.
While Local Avoidance Subsystem/Reactive planner consists of an obstacle filter and an obstacle avoidance algorithm and plans a short way for the vehicle to navigate based only on the environment surrounding the vehicle, generally using only detection sensors Local or reactive avoidance knows about the ideal way of movement, due to path Obstacles, plots a way around the obstacles until the vehicle can securely realign itself to the ideal way of movement.
Now the Obstacles are being detected using the sensory data which is integrated through Kalman Filters, when passed to the processor.
Path Planning
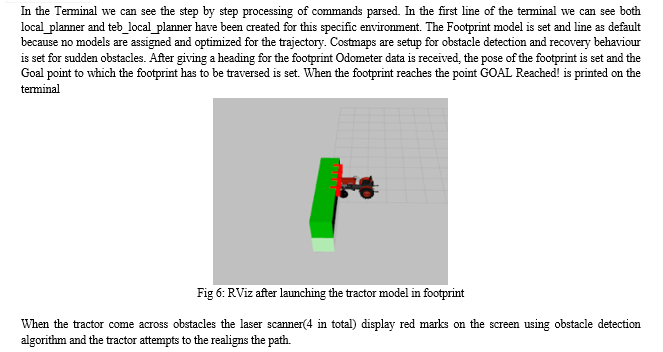
Generally path planning is the determination of an optimal path for a robot between start and goal positions under the constraints given in programming is known an autonomous robot path planning. For this I had used ROS Navigation stack and teb_local_planner which implements a plugin (Timed Elastic Band locally optimizes the robot's trajectory with respect to trajectory execution time and compliance with kinodynamic constraints at runtime) to the base_local_planner of the 2D navigation stack.
The Path planning of the vehicle is commenced. Firstly the path for Global Avoidance subsystem is planned using Costmap_Common_Parameters, Costmap_Exploration_Parameters, Global_Costmap_Parameters program which does give the information of the common parameters like the boundaries of the environment to be explored by Costmap_Common_Parameters, the areas in which the operations are to be performed and the areas to be excluded by Costmap_Exploration_Parameters, the environment parameters in which the robot is present and the link between the world and environment by Global_Costmap_Parameters.
Now when the vehicle comes across any obstacles like electric poles, borewell which cannot be defined in environment only are detected by sensors, the vehicle redrafts the path just to avoid the obstacle and the path ahead if it is dependent on the changed path using Local_Costmap_Parameters and teb_local_planner_parameters.
When move_base command is passed the communication between the maps is done.

References
[1] Keith W. Gray “Obstacle Detection and Avoidance for an Autonomous Farm Tractor” Year-2000. [2] N. Sariff , N. Buniyamin “An Overview of Autonomous Mobile Robot Path Planning Algorithm”. [3] David Bina Siassipour “A study on local planning techniques for mobile robot navigation” Year-2010. [4] Shubham Khandelwal , Neha Kaushik “AgRo-Bot: An Autonomous Robot”Asish Lalwani, Mrunmai Bhide, S. K. Shah “A Review: Autonomous Agribot For Smart Farming” IEEE ISSN: 2347-6982. Year-2016. [5] N. Vamshidhar Reddy, A. V. Vishnu Vardhan Reddy, S. Pranavadithya, J. Jagadesh Kumar “A critical review on agricultural robots” IJMET ISSN: 0976-6359. Year-2016. [6] Pedersen S. M, Fountas S and Blackmore S “Agricultural Robots – Applications and Economic Perspectives”. Year-2008. [7] Ming Li, Kenji Imou, Katsuhiro Wakabayashi, Shinya Yokoyama “Review of research on agricultural vehicle autonomous guidance”. Year-2009. [8] Martin Holm Pedersen, Jens Lund Jensen “Autonomous Agricultural Robot towards robust autonomy”. Year-2006-07 [9] Abdul Qadeer Khan, Ayyaz Akhtar and Muhammad Zubair Ahmad “Autonomous Farm Vehicles Prtotypes Of Power Reaper” [10] David Bina Siassipour “A study on local planning techniques for mobile robot navigation ” [11] James Szabo “A Nuffield (UK) Farming Scholarships Trust Report” [12] Juan Rosenzweig, Michael Bartl “A Review and Analysis of Literature on Autonomous Driving” [13] Ren C. Luo and Michael G. Kay “A Tutorial on Multisensor Integration and Fusion ” [14] Jelena Koci?, Nenad Jovi?i?, and Vujo Drndarevi? “Sensors and Sensor Fusion in Autonomous Vehicles ” [15] Francisca Rosique, Pedro J. Navarro, Carlos Fernández and Antonio Padilla “A Systematic Review of Perception System and Simulators for Autonomous Vehicles Research” Year-2019
Copyright
Copyright © 2024 K. Pragnan Reddy, Dr. M. Sreenivasa Rao. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET58489
Publish Date : 2024-02-18
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online