

Ijraset Journal For Research in Applied Science and Engineering Technology
Direct Torque Control on BLDC Motor for Electric Vehicle
Authors: Mr. Chandrakant J. Sharma, Tejaswini Khawas, Akshay Nandanwar, Bhupesh Paunikar
DOI Link: https://doi.org/10.22214/ijraset.2022.41577
Certificate: View Certificate
Abstract
Electric Car (EV) due to its going for walks 0 emission, sustainability and efficiency is of hobby for future transportation. In-wheel generation has been one of the principal studies concentration factors in ultimate decade. BLDC motor is on call for in-wheel utility due to its excessive performance, torque/velocity traits, high electricity to length ratio, high operating existence and noiseless operation. On this paper direct torque control (DTC) switching technique of BLDC motor for EV propulsion machine is proposed and simulated in MATLAB/SIMULINK. The Simulation consequences show effective manipulate of torque and super discount of torque ripple amplitude compared to standard mentioned switching techniques. Enhancements of in-wheel motor’s torque controllability end result to have extra efficient and safer electric vehicle. The simulation effects of proposed switching machine are fine and display correct performance of device.
Introduction
I. INTRODUCTION
DEA of the use of electricity in preference to fossil fuels for propulsion system of cars is not new. Scientists and producers have attempted to design or improve electric powered automobiles from long term ago. Rodert Anderson constructed the primary electric powered carriage in 1839. In 1870 David Salomon developed an electric powered car with a light electric powered motor. The batteries had been heavy at that time; consequently performance became terrible [1]. nowadays hybrid vehicles are extra famous due to higher mileage and absence of enough infrastructures for charging battery of electrical vehicles. applying in-wheel technology will increase performance and safety of electric vehicles. using in-wheel generation, by using twine generation and wise manipulate structures in preference to traditional hydraulic or pneumatic control systems end result to an wise fully Electronically controlled vehicle (IFECV) [2]. Schematic diagram of 4 wheel force educate of an IFECV is shown in Fig. 1.
Enhancing overall performance of in-wheel motor and its controller can boom performance, controllability and protection of electrical automobiles. numerous electric vehicles have been used by manufacturers in final many years. Brushed DC, induction, switched reluctance and BLDC motors have been as compared and BLDC has been advocated for high overall performance electric powered vehicle. back-EMF tracking, flux linkage-based totally approach and loose-wheeling diode conduction are a number of sensorless manage methods that may be used to commutate BLDC motor instead of the usage of sensors [3]. reducing complexity of motor creation, cost and renovation are obvious advantages of sensorless manage strategies but sensing back-EMF at low speeds, temporary time and discontinuous reaction because of high commutation quotes are its hazards.

Fig. 1 Four-wheel drive train system of an IFECV valuable researches and works were discussed for growing distinct manage algorithms of BLDC motor [3- 7]. Sensorless control method with a new flux linkage characteristic has been pronounced for BLDC vehicles [3]. This method improves problem of sensorless control strategies at low speeds. A velocity-impartial role function named “G(_)” has been described with appreciate to mechanical perspective of rotor.
This approach is able to stumble on position of rotor at around 1.5% of nominal speed. it's miles suitable for in- wheel software due to the fact we want to govern the motor from stall role. four-transfer converter with the present day controlled PWM manage technique has been proposed for BLDC [4]. problems in generating a hundred and twenty° conducting current profiles in 3 segment winding of BLDC with four-switched converter and present day distortion in two segment motive via returned-EMF of silent phase are principal troubles of proposed method. a new strength supply, DSP-controlled PWM chopper and Cdump converter has been provided [5]. A twin pace and modern-day closed- loop manipulate is used to preserve ratio of voltage to frequency consistent to have constant torque operation of motor. pressured commutation RC circuits and snubber circuits to govern commutation and dv/dt rating on switches have been mentioned. Simulation effects show range of current spikes which cause growth on torque ripple of BLDC motor which is not suitable for in-wheel software. An adaptive fuzzy control scheme thru parallel dispensed repayment has been implemented to manipulate pace of small BLDC vehicles [6].
Simulation results display stable velocity manipulate of BLDC motor in case of any parameter perturbation. even though stability and smoothness of torque is important in excessive overall performance EV’s, however it'd be constructive for other programs like scooters and electric powered motorcycles. A virtual controller of BLDC motor with mode of operation, specifically conduction perspective manage and modern mode control has been introduced [7]. Torque is directly proportional to contemporary in BLDC, for that reason current manipulate consequences to torque manipulate of motor. pace ripple of BLDC is reduced via proposed virtual controller as much as most of 3.four percentage. This approach may be extra suitable for EV utility if torque ripple discount additionally has been taken into consideration. DTC technique is a sensorless manage technique. It does now not use any sensor for detecting rotor function. Torque manage is one among vital elements in force teach of electric automobile. reduction of torque ripples cause to supply smoother energy to the wheel. delivering as minimal as viable ripple unfastened torque with preferred value to the wheels in numerous conditions, basically increase protection and performance of electrical car. therefore DTC switching method is recommended for high performance electric motors. On this paper direct torque control (DTC) switching approach of BLDC motor for EV propulsion machine is proposed. precept of DTC switching method of 3 phase BLDC motor for electric vehicle programs is explained in segment . Simulation effects of proposed direct torque manage switching approach of BLDC motor are shown and discussed.
II. METHODOLOGY
A. BLDC Motor Design and Engineering
In terms of structure, a BLDC motor is made up of two major components. One is the stator (stationary component) and rotor (spinning portion), in which the magnetic field created by the stator and rotor spins at the same frequency, hence avoiding the slip found in induction machines. On the stator, there are armature windings, and on the rotor, there are permanent magnets.

BLDC cars have lifelong excitation from everlasting magnets hooked up on rotor surface. There are primary rotor designs internal rotor design and outer rotor design as shown in fig 1. For the outer rotor design, the winding are positioned in the center of the motor. The rotor magnets surround the stator windings and acts as an insulator, reducing the price of heat dissipation from the motor. This layout operates at decrease responsibility cycles or at lower rated current and it's far utilized in low speed vehicles. The gain of this design is extraordinarily low cogging torque. For the inner rotor layout, the stator winding surround the rotor and is constant at motor housing. The benefit of the layout is the potential to use up warmth accordingly without delay influences its capacity to generate torque and its lower inertia and these are used in high speed applications.
Stator incorporates a 3-? windings and the no of stator slots is chosen relying on the rotor poles, winding configuration, phase wide variety. A fractional slots/pole layout is preferred to decrease cogging torque. The winding slots are built into the stator and rotating magnetic area is supplied via the cutting-edge polarity modifications inside the slot windings. The trade of contemporary polarity have to be according to the rotor magnetic subject, which calls for the location of the rotor. hall impact sensors are constant on the stator to provide this information. stable kingdom switches are used for contemporary commutation which gets rid of the need of brushes.
B. Standard Control System
The employment of current control techniques is a simple solution that can meet these needs. Figure 5 depicts the construction of a BLDC motor's current controller. Current control may be produced by managing the three-phase current at its reference point in such a way that,

It will fulfil the equations (4). As indicated in Fig. 5, the motor currents must be adjusted in accordance with their references (ia*, ib*, and ic*). The reference current generations are based on the torque demand (i.e. Iref =Te,ref
x G1) and decoded signals (H1', H2', and H3') produced from the Hall Effect signals (H1, H2, and H3), as shown in Table. I.
TABLE I: Hall Signal-Based Derivation of Decoded
Signals.
|
Hall Effect Signal |
Decoded Signal |
||||
|
H1 |
H2 |
H3 |
H1 |
H2 |
H3 |
|
0 |
0 |
0 |
0 |
0 |
0 |
|
0 |
0 |
1 |
0 |
-1 |
+1 |
|
0 |
1 |
0 |
-1 |
+1 |
0 |
|
0 |
1 |
1 |
-1 |
0 |
+1 |
|
1 |
0 |
0 |
+1 |
-1 |
0 |
|
1 |
0 |
1 |
0 |
+1 |
-1 |
|
1 |
1 |
0 |
0 |
+1 |
-1 |
|
1 |
1 |
1 |
0 |
0 |
0 |
Every section modern-day is managed the usage of a 2- degree hysteresis comparator, that is responsible to provide appropriate switching reputation to be fed into the inverter, both to growth or lower the section modern such that its error (or modern-day ripple) is limited inside the hysteresis band (HB). In any such way, the reference modern for every phase can have the same pattern waveform with the respective decoded signals.
Within the traditional present day control technique, the current continues to be drawn from the batteries even the reference contemporary is ready to zero. because the phase current desires to be regulated IGBTs/MOSFETs inside the inverter, while the torque pedal is launched (Te,ref= zero) and as soon as the real motor torque is completely decreased to 0. This phase presents a present day blockading approach to keep away from a waste of strength from the battery (because of the contemporary drawn) whilst the torque pedal is launched (i.e. Te,ref= zero) for electric powered vehicle programs.
This genuinely may be mounted with minor change on the original structure of present day manage (proven in Fig. five) the usage of hysteresis comparator as proven in Fig. 6 inside the hysteresis band at round zero Amperes (A). to block the cutting-edge drawn from the battery, the proposed present day blocking strategy will flip OFF all. via referring to the Fig. 6, the activation of modern-day blocking method calls for the absolute price of torque call for, Te,ref and segment currents (ia, ib and ic) which might be then fed into zero crossing detector and hysteresis comparator, respectively.
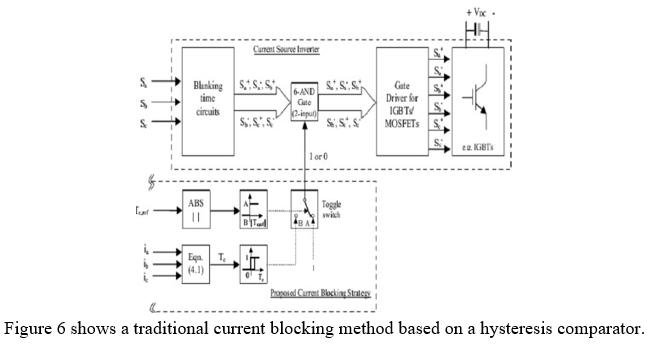
The activation to switch OFF all IGBTs/MOSFETs in current source inverter will perform if the torque production, Te and torque demand, Te,ref decrease to zero. For clearer picture, the condition of the activation is illustrated in Fig 7. Otherwise, normal switching opera-tion to keep the current (or torque) to be regulated within the hysteresis band will perform.

III. BLOCK DIAGRAM COMPONENTS
A. Current Controller
Hysteresis manipulate is one of the simplest closed-loop manipulate schemes. A reference sine wave present day is compa-red with the actual phase modern-day. while the cutting-edge exceeds a prescribed hysteresis band, the higher transfer inside the inverter bridge is became off became off and the top switch is became on. The real cutting-edge is pressured to tune the sine reference in the hysteresis band by means of to and fro (or bang-bang) switching of the upper and decrease switches. The inverter then essentially will become a cutting-edge source with top-to-top modern-day ripple, that is controlled inside the hysteresis band. In hysteresis manipulate, the fee of the managed variable is compelled to stay inside positive limits round its reference value. by way of comparing with PWM approach, hysteresis modern controller is preferred, thinking about its performance, fast response most cutting-edge restrict and insensible to load parameter versions.
Due to loss of coordination among individual hysteresis controllers of 3 stages, very excessive switching frequency at lower modulation index may appear [7]. The drawback of the hysteresis band manipulate approach are the high and uncontrolled switching. frequencies whilst a slim hysteresis band is used and big ripples when the hysteresis band is wider [8].
The out of control switching frequency makes it difficult to clear out the acoustic and electromagnetic noise. The switc-hing technique used here is the tender reducing method wherein handiest the higher switch is became on and stale while the decrease transfer is left on. This method produces much less torque ripple and much less switching losses than the tough chopp-ing method. simplest contemporary manage is implemented right here. The reason is that if position manipulate is to be carried out within the equal way because the torque and the function manage, it would most effective be viable via constantly reversing the rotor pace so that the rotor angle could stay inside the hysteresis band.
B. Rectifier
Rectifiers are electrical devices that convert alternating current to direct current (A.C-D.C), which only travels in one direction. Many uses for rectifiers include power supply for television and computer equipment, radios, and other devices that require a steady DC current (as provided by a battery). In these applications, the rectifier's output is bent by an electronic filter (often a capacitor) to provide a constant current.
C. DC-DC Converter (Buck Converter)
A buck converter is a voltage and current step-down converter. The current in an inductor is limited by two switches in the essential working of the buck converter (usually a transistor and a diode).

The buck converter is applied in this study for voltage step down of rectified D.C. The voltage is adjusted based on the duty ratio (D). The gate signals are created by applying the motor's current speed waveforms. The battery receives this regulated voltage.
Output voltage of buck converter.
Vo = D Vin …(1)
Note that the equation is centered using a center tab stop. Be sure that the symbols in your equation have been defined before or immediately following the equation. Use “(1)”, not “Eq. (1)” or “equation (1)”, except at the beginning of a sentence: “Equation (1) is . . .”
D. Current Source Inverter (C.S.I)
An inverter is an digital device that changes direct contemporary (DC) to alternating cutting-edge (AC). The input voltage, output voltage and frequency, and usual electricity handling rely on the design of the precise device. The converter is a 3 segment DC to AC converter and it consists of six solid kingdom semiconductor switches as shown in figure nine. MOSFETS and IGBT are the most not unusual styles of switches used. In lower power application, MOSFETS are favoured over IGBT. The power electronic converter is vital to operate the BLDC machine. modern commutation is carried out by means of a six-step inverter. The three section BLDC motor is operating in a levels-on fashion because of this the two stages that produce the very best torque are energized whilst the 1/3 phase is off, see determine 2. the two levels are energized relies upon at the rotor position. Corridor impact function sensors are maximum often used. The inverter is answerable for each the electronic commutation and cutting-edge law. The conduction of each phase winding is determined by using the rotor role in which the placement may be recognized from corridor impact sensors that gives three digit output that modifications each 60 diploma (electric stages).The generation of three digitized outputs (i.e. H1,H2 and H3)from the sensor in keeping with the rotor function can be also defined in desk 2.

The power electronic inverter must have the capacity to contribute positive, negative, and zero voltage across the motor phase terminals. Each driving phase has one motor terminal that is driven elevated, one motor terminal that is driven down, and one motor terminal that is floating.
IV. PROPOSED ARCHITECTURES FOR DIRECT-TORQUE CONTROL
Only modern-day can be managed in the classic cutting- edge control method, with large torque ripples. To eliminate torque ripples, the Direct Torque Manipulation Scheme is extended to BLDC motor drives. Under 2-segment conduction mode, the electro-magnetic torque and stator flux linkage amplitude of the BLDC motor may be regulated concurrently.
We're going to use direct torque control to reduce torque ripples in this case. The disadvantage of BLDC pressure is high torque pulsation. Essentially, it is as a result of - additives, one of which is ripple torque and the other is commutation torque.
The major components of ripple torque are motor and inverter related. Non-idealities in the returning e.m.f wave patterns are used to create motor-related components. right now The motor is responsible for cogging torque, whereas the inverter is responsible for ripple torque.
The interaction of the armature currents with the device back e.m.f wave waveform causes ripple torque. Cogging torque is generated by a type of reluctance caused by stator slot holes as the rotor rotates. Cogging torque can be reduced by skewing and selecting a fractional slot/pole motor arrangement.

Torque additions deviate from the proper square cutting-edge profiles. The Hysteresis controller, which creates excessive switching frequency cutting-edge ripple, causes the inverter- related ripple torque. This high frequency ripple is created by a similar modern-phase ripple. The back e.m.f connected object has a high frequency; it's far Six instances of the electrical frequency, corresponding to the six conduction periods in each cycle. At low speeds, they can have an impact on the overall performance of the power, but at high speeds, they are filtered out by load inertia. The high frequency torque ripple is decreased by regulating the current and the rotor position.
The second element of inverter linked torque ripple is commutation torque ripple, which occurs at every instantaneous commutation.
During the switching instants, the torque ripple generates a number of currents at the ON/OFF position that are practically non-regular. here. The current commutation is from B – segment to C – section. The rate at which the current builds up in the C – segment is greater than the rate at which it decays in the B – phase, resulting in cutting-edge ripple in the A – segment and, as a result, ripple in torque production. The torque ripple is affected by rotor speed and supply voltage. The use of cutting-edge sensors in each segment reduces the commutation ripple aspect.
The supply voltage, BLDC motor cutting-edge, and actual speed (m) are all controlled by the D.C/D.C converter. Real velocity is compared to regard velocity (*) and is controlled by a PI controller. The switching pulses to the dollar converter are generated by the PWM controller, which regulates the supply voltage.
??????


VI. ACKNOWLEDGMENT
We take this opportunity to express our profound gratitude and deep regards to Our Project Guide , Department of Electrical Engineering, KDK College of Engineering, Nagpur which provided guidance and space for us to complete this work.
Conclusion
This paper presents the simulation results of the Direct Torque Control drive of brushless DC (BLDC) using the current Hysteresis control method to increase the voltage level of batteries per charge used in electric vehicles. With normal current control, the current is still discharged from batteries even when the engine is off. To avoid that power leak, it is fitted with a zero crossing detector. By using a Hysteresis comparator it produces a high switching frequency, which produces ripple torque. But in this process only current control is possible. The proposed method reduces Torque ripple by controlling the inverter switching and high frequency switching using the Direct Torque controller. Simulation of direct torque control is performed using MATLAB / Simulink.
References
[1] ?hm?d F?iz N??r ?z?m, ?uz?ni Jidin, N?r ?z?zi Ng?tim?n, M.H J??ri, Must?f? M?n??, ?deline Luk?r Herlin?, N?r F?ez?h ?li?s ?urrent ??ntr?l ?f bld? drive f?r ev ???li??ti?n,IEEE 7th Intern?ti?n?l ??wer Engineering ?nd ??timiz?ti?n ??nferen?e (?E???2013), L?ngk?wi, M?l?yssi?. 3-4 June,2013. [2] Lefley, ?., L. ?etk?vsk?, ?nd G. ?vetk?vski. ??timiz?ti?n ?f the design ??r?meters ?f ?n ?symmetri? brushless D? m?t?r f?r ??gging t?rque minimiz?ti?n in ??wer Ele?tr?ni?s ?nd ???li??ti?ns (E?E 2011), ?r??eeding ?f the 2011-14thEur??e?n ??nferen?e ?n 2011. [3] B?h?ri N., Jidin ?., ?bdull?h ?. R. ?nd ?thm?n M. N., “M?deling ?nd Simul?ti?n ?f T?rque Hysteresis ??ntr?ller f?r Brushless D? M?t?r Drives”, IEEE Sym??sium ?n Industri?l Ele?tr?ni?s ?nd ???li??ti?ns ISIE?, 2012. [4] M?yer, J.S. ?nd ?. W?syn?zuk, “?n?lysis ?nd m?delling ?f ? single-?h?se brushless D? m?t?r drive system”, Energy ??nversi?n, IEEE Tr?ns??ti?ns ?n, 1989. 4(3): ?. 473-479. [5] [5] Jidin, ?., Idris, N. R. N., Y?tim, ?. H. M., Sutikn?, T. ?nd Elbuluk, M. E. ‘?n ??timized Swit?hing Str?tegy f?r Qui?k Dyn?mi? T?rque ??ntr?l in DT?-Hysteresis-B?sed Indu?ti?n M??hines’, IEEE Tr?ns??ti?ns ?n Industri?l Ele?tr?ni?s,2011, V?l. 58, ??. 3391-3400. [6] N?rh?zilin? Binti B?h?ri; Jidin, ?uz?ni bin; ?bdull?h, ?bdul R?him bin; Md N?zri bin ?thm?n; M?n??, Must?f? bin, \"M?deling ?nd simul?ti?n ?f t?rque hysteresis ??ntr?ller f?r brushless D? m?t?r drives,\" Industri?l Ele?tr?ni?s ?nd ???li??ti?ns (ISIE?), 2012 IEEE Sym??sium ?n , v?l., n?., ??.152,155, 23-26 Se?t. 2012 [7] Hendersh?t, J.R ?nd T. Miller. Design ?f Brushless ?erm?nent M?gnet M?t?rs. ?xf?rd: M?gn? ?hysi?s ?ubli??ti?ns & ?xf?rd S?ien?e ?ubli??ti?n, 1994. [8] ?hing-Ts?i, ?. ?nd ?. Ting-Yu, ?n im?r?ved hysteresis ?urrent ??ntr?ller f?r redu?ing swit?hing frequen?y. ??wer Ele?tr?ni?s, IEEE Tr?ns??ti?ns ?n, 1994. 9(1): ?. 97-104. [9] KS L?w M.F R?hm?n ?nd K.W Lim. ???r???hes t? the ??ntr?l ?f T?rque ?nd ?urrent in Brushless D? Drive,2002.
Copyright
Copyright © 2022 Mr. Chandrakant J. Sharma, Tejaswini Khawas, Akshay Nandanwar, Bhupesh Paunikar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET41577
Publish Date : 2022-04-18
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online