

Ijraset Journal For Research in Applied Science and Engineering Technology
Design of E-Cycle Drivetrain Configuration Using MATLAB
Authors: Dr. K. Senthil Kumar, Mr. D. Rajesh Kumar , K. Shyam, B. Nirmal, D. Shivaram, S. Ganesha
DOI Link: https://doi.org/10.22214/ijraset.2024.59359
Certificate: View Certificate
Abstract
This research explores the comprehensive dynamics of electric bicycles, focusing on the intricate interplay of rolling resistance, gradient resistance, aerodynamic resistance, and acceleration resistance. Through detailed analysis and mathematical formulations, the study aims to provide insights crucial for optimizing the design and efficiency of electric bicycle propulsion systems. By understanding the various resistive forces affecting performance, engineers and researchers can contribute to the ongoing evolution of sustainable urban mobility solutions Within this research, an in-depth examination unfolds, delving into the nuanced dynamics of electric bicycles. The spotlight is on the complex interaction between rolling resistance, gradient resistance, aerodynamic resistance, and acceleration resistance. Employing meticulous mathematical formulations and detailed analysis, the study endeavors to offer invaluable insights essential for the optimization of electric bicycle propulsion system designs. As engineers and researchers grasp the intricacies of these resistive forces and their impact on performance, their contributions become instrumental in advancing the continuous evolution of sustainable urban mobility solutions. This research aims not only to decipher the current challenges but also to pave the way for innovative solutions that elevate the efficiency, sustainability, and overall effectiveness of electric bicycles in the urban transportation landscape.
Introduction
I. INTRODUCTION
In order to improve the efficiency and performance of electric bicycles (E-bikes), it is essential to choose the right propulsion system. Brushless DC (BLDC) motors have become a common choice for urban mobility due to their balance of power and efficiency. As these motors become integral to E-bike design, understanding and optimizing the traction power they provide is essential. The motor's ability to propel the bicycle is influenced by the calculation of traction power, which has a significant effect on acceleration, speed, and overall ride experience. This paper focuses on a comprehensive analysis of traction power calculations in the context of an E-bike utilizing a BLDC motor. By delving into the intricacies of these calculations, we aim to elucidate the key parameters influencing traction power, providing valuable insights for engineers, designers, and researchers in the field. Through a rigorous examination of the relationship between motor specifications, terrain, and rider dynamics, this analysis seeks to contribute to the refinement and optimization of electric bicycle designs, ultimately advancing the efficacy of BLDC motor-powered E-bikes in urban transportation scenarios. This project holds multifaceted advantages that extend beyond the realms of academic inquiry. Firstly, by comprehensively exploring the dynamics of electric bicycles, it contributes essential knowledge to the burgeoning field of sustainable transportation. The insights gained from detailed analyses of resistive forces, such as rolling resistance, gradient resistance, aerodynamic resistance, and acceleration resistance, offer a foundation for designing electric bicycles with enhanced efficiency. Engineers and researchers can leverage this understanding to optimize propulsion systems, thereby contributing to the ongoing evolution of urban mobility solutions. Furthermore, the project aligns with global efforts to address environmental concerns by promoting electric bicycles as eco-friendly alternatives. As the world increasingly gravitates towards sustainable practices, the findings from this research provide actionable data for the development of electric bicycles that minimize energy consumption and reduce carbon footprints.
II. VECHILE DYNAMICS
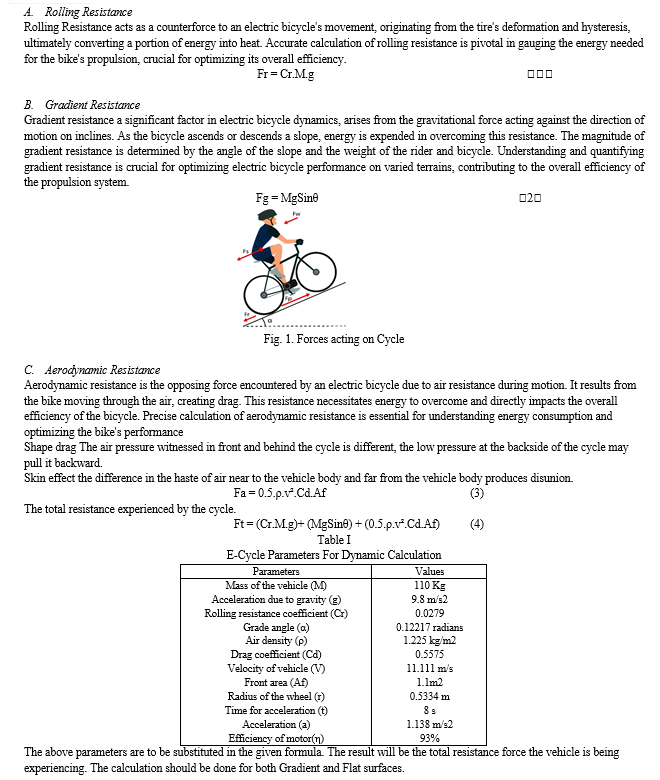
This study undertakes a comprehensive evaluation of the dynamics of electric bicycles, considering crucial factors such as rolling resistance, gradient resistance, aerodynamic resistance, and acceleration resistance. Through a thorough analysis of these elements, the research aims to provide a nuanced comprehension of the intricate interplay among various resistive forces that impact the vehicle's performance. The subsequent exploration of formulas will clarify the mathematical foundations underlying each type of resistance, serving as a practical guide for engineers and researchers aiming to optimize electric bicycle designs. This investigation has the potential to improve the efficiency and sustainability of electric bicycle propulsion systems, contributing to the continuous evolution of urban mobility solutions
IV. RESULT AND DISCUSSION
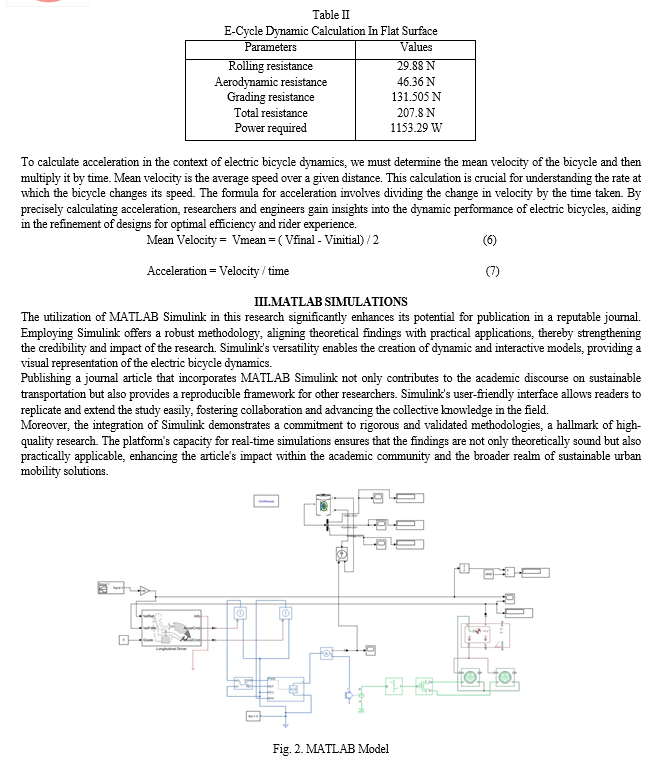
The results of this research, derived from the extensive analysis of electric bicycle dynamics using MATLAB Simulink, yield critical insights into the behavior of resistive forces. The simulations provide a nuanced understanding of how rolling resistance, gradient resistance, aerodynamic resistance, and acceleration resistance collectively influence the overall performance of electric bicycles. Visualizations from Simulink highlight the dynamic interplay of these forces, aiding in the identification of key parameters influencing efficiency.
The discussion of results revolves around the implications for electric bicycle design and optimization. Findings underscore the significance of minimizing resistive forces to enhance efficiency and extend battery life. Strategies to mitigate these forces, such as optimizing tire properties, reducing air drag, and fine-tuning acceleration profiles, are explored. The real-time simulations in Simulink offer a platform for iterative design improvements, enabling engineers to refine electric bicycle propulsion systems.
Moreover, the integration of MATLAB Simulink proves instrumental in bridging theory and practical application. The discussion emphasizes the platform's utility in providing a replicable framework for future studies and its potential for collaborative research efforts within the field of sustainable urban mobility. Overall, the results and discussion not only deepen our comprehension of electric bicycle dynamics but also provide a foundation for advancing design strategies, fostering innovation, and propelling the practical integration of electric bicycles in sustainable transportation solutions.
Conclusion
This research delves into the intricate dynamics of electric bicycles, shedding light on the interplay of resistive forces such as rolling resistance, gradient resistance, aerodynamic resistance, and acceleration resistance. Through comprehensive analyses and mathematical formulations, the study not only provides valuable insights crucial for optimizing the design and efficiency of electric bicycle propulsion systems but also contributes to the ongoing evolution of sustainable urban mobility solutions.The integration of MATLAB Simulink in this research offers a robust and practical approach, bridging the gap between theory and application. This not only enhances the academic rigor of the study but also facilitates real-world applicability, making it a valuable contribution to the field. The findings presented herein not only advance our understanding of electric bicycle dynamics but also lay the foundation for further research and innovation in the quest for more efficient, sustainable, and practical urban transportation solutions. As electric bicycles continue to emerge as key players in eco-friendly mobility, this research serves as a stepping stone towards their optimal integration into the broader landscape of modern transportation.
References
[1] Edgar Tournon, Pascal Venet, Bertranad Barbedette, Judicael Aubry, “Efficiency Comparison between Series Hybrid Bike and Traditional Bike” Conference Paper, May 2019. [2] Rushi Shenghani, Nayan Patel, Chirag Jain, Himanshu Rawat, B.R.Chaudhari, “Development of hybrid two Wheeler vehicle, 2017”. [3] C. C. Chan “The state of the art of electric and hybrid vehicles “Proceeding to IEEE, Vol. 90 Issue 2, PP. 247-275, 2017. [4] Ranjan Kumar, Munna Kumar, etal. “Design and Fabrication of Electric Bicycle”, ISSN: 2278- 0181(2018). [5] Vanessa Paladini, Teresa Donateo, Arturo de risi, Domenico Laforgia, “Control Strategy Optimization of a Fuel-Cell Electric Vehicle”. [6] Mitesh Trivedi, Manish Budhvani, Kuldeep Sapovadiya, Darshan Pansuriya, Chirag Ajudiya, “Design & Development of E- Bike”. [7] J. Lin, N. Schofield, and A. Emadi, “External-Rotor 6-10 Switched Reluctance Motor for an Electric Bicycle,” IEEE Trans. Transp. Electrif., vol. 1, no. 4, pp. 348–356, 2015. [8] V. Naveen Kumar, A. Syed, D. Kuruganti, A. Egoor, and S. Vemuri, “Measurement of position (angle) information of BLDC motor for commutation used for e-bike,” in Proceedings of the 2013 International Conference on Advanced Electronic Systems, ICAES 2013, 2013, pp. 316–318. [9] Y. Zhou, D. Zhang, X. Chen, and Q. Lin, “Sensorless Direct Torque Control for Saliency Permanent Magnet Brushless DC Motors,” IEEE Trans. Energy Convers., vol. 31, no. 2, pp. 446– 454, 2016. [10] Dhvani Pandya and A.M Bisen, “Analysis of Chassis in 3-Wheeler E Rickshaw for weight reduction”, vol. 4, pp. 1–3, July 2018. [11] Venkata Mangaraju Karanman and Ashitawa Ghosal, “Studies on wobble mode stability of a three wheeled vehicle”, vol. 227, pp. 1200– 1209, August 2013. [12] Yang, Zhi, et al. ”Comparative study of interior permanent magnet, induction, and switched reluctance motor drives for EV and HEV applications.” IEEE Transactions on Transportation Electrification 1.3 (2015): 245-254. [13] SOLEIMANI, KESHAYEH MJ, and S. Asghar Gholamian. ”Optimum design of a three-phase permanent magnet synchronous motor for industrial applications.” (2013): 67-85.in Industrial Robot.”
Copyright
Copyright © 2024 Dr. K. Senthil Kumar, Mr. D. Rajesh Kumar , K. Shyam, B. Nirmal, D. Shivaram, S. Ganesha. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET59359
Publish Date : 2024-03-24
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online