

Ijraset Journal For Research in Applied Science and Engineering Technology
Electronic Camming: A Novel Approach to Dynamic Motion Control in Automated Systems
Authors: Sahil Malwanker
DOI Link: https://doi.org/10.22214/ijraset.2024.58416
Certificate: View Certificate
Abstract
This research investigates the innovative concept of electronic camming, a method for determining the motion of a slave axis (Y) based on the position of a master axis (X) through a pre-defined electronic cam table. In contrast to traditional mechanical camshaft systems, electronic camming utilizes control signals to emulate the motion profile of a physical cam, enabling rapid and effortless modifications without requiring mechanical adjustments. The system\'s ability to achieve non-linear and uniquely defined slave axis positions for each master axis position simulates traditional mechanical camshaft behavior but in an electronic framework. Leveraging servomotors, actuators, and electronic gearing functions within drives and controllers, electronic camming not only allows dynamic on-the-fly motion profile modifications but also holds the promise of reducing wear and maintenance associated with traditional cam systems. This study contributes valuable insights into the capabilities and potential applications of electronic camming technology, highlighting its significance in the evolution of dynamic motion control within automated systems.
Introduction
I. INTRODUCTION
In the ever-evolving landscape of automation and motion control, the advent of electronic camming represents a transformative leap forward in technology. This innovative approach redefines the dynamics of motion control by electronically simulating the behavior of traditional mechanical camshafts. The electronic cam, operating as a periodic function, orchestrates the precise motion of a slave axis in response to the master axis, all without the need for cumbersome mechanical adjustments. This paradigm shift not only enhances the adaptability and efficiency of automated systems but also introduces a level of agility previously unattainable with conventional cam and follower setups. The ability to swiftly modify motion profiles dynamically, facilitated by electronic camming, holds the promise of ushering in a new era of dynamic and responsive automation. This research delves into the advantages, applications, and potential advancements offered by electronic cam technology, shedding light on its role in shaping the future of motion control systems.
II. OBJECTIVE
The objective of this research is to explore and demonstrate the capabilities and applications of electronic cam technology in motion control systems. The study aims to highlight the transformative potential of electronic camming, which operates as a periodic function defining the motion of a slave axis based on the position of a master axis. The primary focus is on showcasing the advantages of electronic camming, particularly its ability to quickly and easily modify motion profiles without mechanical adjustments, offering a distinct advantage over traditional cam and follower setups. The research seeks to delve into the application details, system configuration, and sequence of operations involved in utilizing a Master Axis to generate various motion profiles for a Slave Axis, employing the Electronic CamTool in conjunction with YASKAWA Motion controllers. Furthermore, the study aims to elucidate the preparation of CAM data, ladder logic for sawtooth generation, and the configuration of modules within the MP Controller. The ultimate goal is to provide valuable insights into the electronic cam technology's efficiency, adaptability, and its potential to shape the future of motion control systems, while also offering practical commissioning notes and measures for optimal system performance.
III. THEORETICAL OVERVIEW
A. Mechanical CAM
Mechanical CAM, or Cam and Follower Mechanism, is a crucial element in engineering, converting rotational motion into reciprocating or oscillating motion.
The cam's profile intricacies, encompassing rise, dwell, and fall phases, directly impact the follower's behavior. During the rise phase, the profile determines the lifting speed, while the fall phase lowers the follower, dictated by the fall cam profile. The dwell segment maintains a constant radius, keeping the follower stationary. Engineers meticulously design cam shapes to achieve specific follower movements. This mechanical CAM system finds versatile applications in various industries, offering a fundamental means to control and optimize motion in machines.
Cams have the capability to generate unconventional and irregular motions that would be challenging to achieve through alternative means. The fundamental concept is depicted in Fig. 1., where a shaft rotates uniformly, bearing an irregularly shaped disk known as a cam. A reciprocating component, referred to as the cam follower, exerts pressure on the cam's curved surface using a small roller. The rotation of the cam induces a cyclic reciprocating motion in the follower, the specifics of which are determined by the shape of the cam profile. To maintain contact between the roller and the cam, gravity or a spring is typically employed.

B. Electronic CAM
Electronic CAM, functioning as a periodic master-slave control system, defines the motion of a slave axis (Y) in relation to the position of the master axis (X) through a pre-defined electronic cam table. Unlike traditional mechanical camshafts, electronic CAM operates digitally, replicating motion profiles using control signals and a CAM function generator. This technology allows for rapid and seamless modification of motion profiles without requiring mechanical adjustments. It employs servomotors, actuators, and electronic gearing functions in conjunction with controllers. The primary advantage lies in the ability to change motion profiles on-the-fly, reducing wear and maintenance associated with physical cam systems. Synchronous follow type control ensures precise machine operation in complete harmony with a defined standard, achieved through electronic cam control techniques. This approach offers versatility and efficiency, marking a departure from traditional cam and follower setups.As shown in Fig. 2 an electronic motion controller duplicates the traditional mechanical CAM profile using a servo master axis with an actuator mechanism.

IV. APPLICATION OVERVIEW
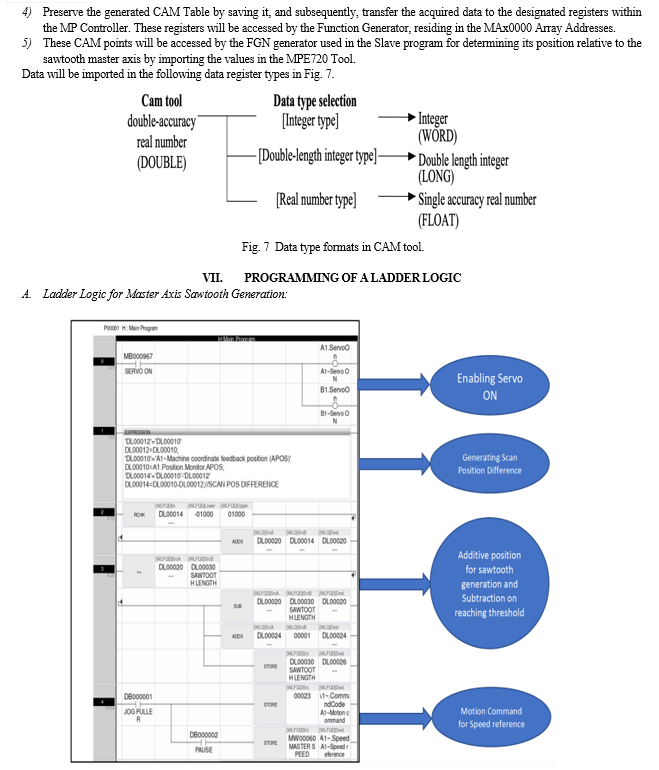
A. Master Axis Sawtooth Generation:
Utilize the MP Controller's additive scan delay feature to precisely control the timing and duration of the generated Sawtooth waveform with specified units.
B. Customized Slave Axis Motion:
Tailor the slave axis motion to application requirements by selecting dynamic profiles like Bell Curve, Parabolic Motion, Harmonic Motion, Trapezoidal Motion, or Triangular Motion. Define the slave axis motion profile by strategically plotting graphical points aligned with the Master plot, allowing for a customized and application-specific response.
C. Master-Slave Coordination:
Leverage the Function Generator function within the MP Controller to provide a dynamic reference for the slave axis based on the real-time movement of the Master Axis. Ensure seamless coordination between the Master and Slave Axes, enabling the slave axis to dynamically adapt its operation in response to the Master Axis movement.
D. Electronic CamTool Integration:
Employing YASKAWA Motion controllers' Electronic CamTool, this system generates CAM waveforms or profiles for multiple axes, offering a holistic solution for intricate motion requirements. The tool is leveraged to meticulously design both master and slave movements, providing a versatile and precise approach to motion control. Furthermore, the seamless incorporation of values from the cam table into ladder logic ensures the straightforward execution of a simple CAM profile within the MP Controller, streamlining the overall motion control process.

System Configuration :
- MP Controller – MP3300
- Servo Amplifier - SGD7S-R70A10A (2 Nos)
- Servomotor – SGM7J-A5A7A21 (2 Nos)
- Software – MPE720 Ver.7, Electronic Cam-Tool
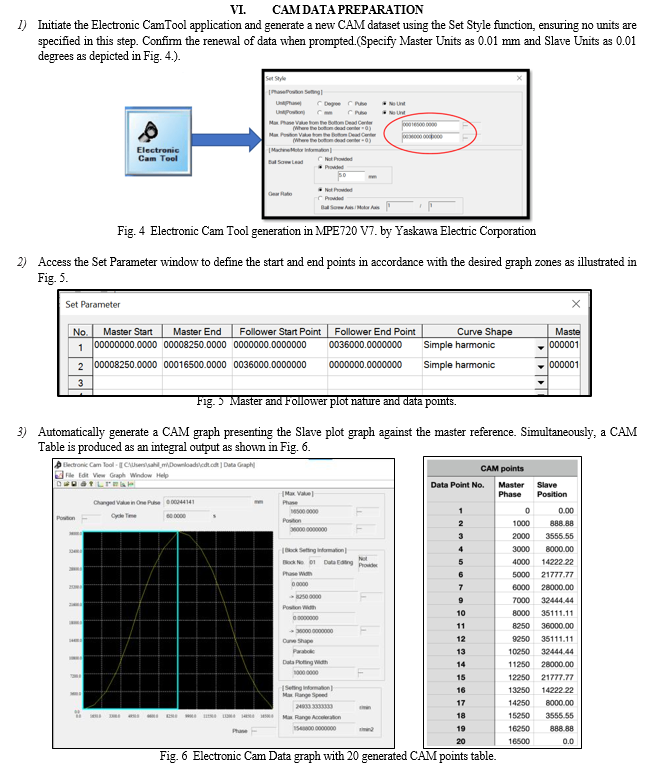
V. SEQUENCE OF OPERATIONS
- Additive Scan delay of a Local register in Ladder program will generate a ramp-like reference which when reaches the threshold value will reset to zero. This represents the start to end points on the plot of the Master Axis. Speed reference of the master axis will decide the width of the Sawtooth function
- Function Generator (FGN) will use the Sawtooth reference as an input to generate the Output reference based on the CAM table data stored in the ML or MW registers of the MP Controller
- FGN Output will be used as a position reference for the slave axis using Interpolation as the Motion Command Code
- The start to end points of the slave axis will be defined by the FGN while the profile generated will be decided by the cam table
- While the master goes from 0 to 165mm Slave will go from 0 to 360 degrees and back in either Bell Curve, Parabolic Motion, Harmonic Motion, Trapezoidal Motion or Triangular Motion as shown in Fig. 3.


C. Dynamic CAM Waveform Generation
The Electronic CamTool, working in tandem with the MP Controller, successfully generated dynamic CAM waveforms for both the Master and Slave Axes. This capability allows for adaptable motion profiles, showcasing the system's ability to electronically simulate traditional mechanical camshaft behavior. Real-time traces of both axes confirmed synchronous operation aligned with the CAM points generated in the Cam data tool.
D. Unit Flexibility and Streamlined Operation
The system exhibited flexibility in data unit selection, accommodating applications in degrees or millimeters. This adaptability enhances the versatility of multi-axis electronic camming. Unlike traditional approaches that require dedicated velocity profiles for each axis at various speeds, electronic cams streamline the process by linking all axes to a single master axis. This ensures synchronized motion, simplifies programming, and eliminates the need for individual velocity profiles.
E. Importance of CAM Data Points
Observations underscored the significance of having a higher number of CAM data points for smoother movement of the Slave Axis. This finding aligns with the system's responsiveness to data granularity, emphasizing the importance of optimizing the CAM data points for optimal performance during operation. This insight provides valuable guidance for system configuration and commissioning to achieve optimal results in practical applications.
Conclusion
In conclusion, this research illuminates the transformative potential of electronic camming in dynamic motion control within automated systems. Electronic cam technology, mimicking traditional mechanical camshafts, operates digitally and offers unparalleled adaptability. The system\'s ability to swiftly modify motion profiles, showcased through real-time traces of Master and Slave Axes, underscores its efficacy in achieving intricate and predefined motion patterns. The flexibility and quick adjustments afforded by the Electronic CamTool and Motion Controller present a significant advancement, eliminating the need for cumbersome mechanical modifications. The streamlined operation, unit flexibility, and synchronization of multiple axes to a single master axis exemplify the system\'s efficiency. Observations regarding the importance of CAM data points emphasize the need for a higher granularity to optimize performance. Overall, electronic camming emerges as a cutting-edge technology shaping the future of motion control systems, promising enhanced adaptability, precision, and reduced maintenance in automated applications.
References
[1] Adi Setiadi and Hanny J. Berchmans, Development of Electronic Cam Motion Control for Synchronous Cutting System, Department of Mechanical Engineering Swiss German University [2] Yaskawa. 2004. Machine Controller MP900/MP2000 Series Operation Manual : Electronic cam data Preparation tool. Yaskawa Electric Corporation, Japan [3] Demystifying electronic camming by Tolomatic on July 14, 2020 [4] Mike Woelfel. 1999. Introduction to electronic cam. Assembly Automation. 19(1): p. 17-24 [5] Jeffery Jensen, Engineer-Mechanical,Inventor-Cams,12 March 2019
Copyright
Copyright © 2024 Sahil Malwanker. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET58416
Publish Date : 2024-02-12
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online