

Ijraset Journal For Research in Applied Science and Engineering Technology
Electronic Steering Stability System
Authors: Shubham Kothawade, Sarthak Sawale, Sakshi Tapkir
DOI Link: https://doi.org/10.22214/ijraset.2023.56257
Certificate: View Certificate
Abstract
As the world is moving towards betterment of human beings each and every day, it is very important to ensure safety with growth. We all are familiar with the increasing number of road accidents regardless of the fact that the technology is growing with great momentum. In this race of modern technology human safety should be considered a higher priority. And hence the primary aim of this system being innovated is to ensure higher road safety.
Introduction
I. INTRODUCTION
The issue of vehicle oversteer was observed several times. The reasons for this failure in vehicles were addressed and the major affecting factors were considered to find gaps to fill. As there was not much data available for reference a wider exploratory research methodology had to be followed. Accordingly, a number of trials were conducted to observe and study the problem. Once a brief overlook of the problem was noted down the development of the system was planned out. Various data were collected to look for pre-existing systems in the same problem favour. Brief study of all the components to be used in the system was done. All the available components in the market were compared according to required specifications. Various industrial software’s like Solid works, MATLAB’s, Ansys, Adams, Altium and Proteus were used to process, evaluate and simulate all the data collected. During this process. A proper research methodology was followed throughout the research. A very reliable and safe system is developed. After testing the entire system through various simulations it is observed that the system is ready for industrial use. 98% of solution satisfaction can be achieved through this system. There are certain situations where this system fails to perform and has space for improvement. This is not the end. We are continuously working to improve the system accuracy and expand usability range for various other applications.
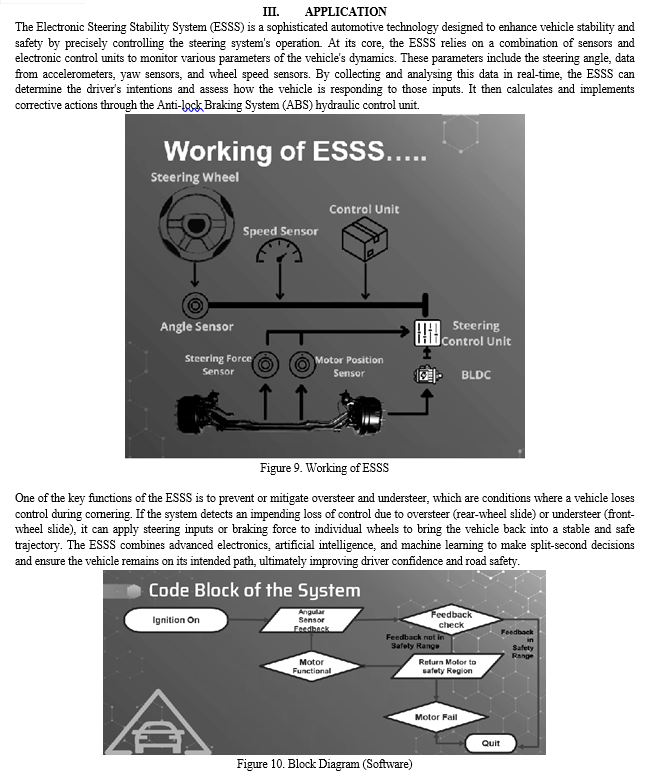
We all have faced the issue of vehicle oversteer at least once at a certain point. Vehicle oversteer primarily occurs when the steering system of the vehicle fails to keep control on the dynamic movements of the car resulting in a lateral spin. ESSS is an advanced system which primarily deals with vehicle stability and précised control over human and mechanical errors. The basic working principle of the system is to control oversteer of the vehicle using advanced electronics, AI and machine learning. This system is an electronically actuated steering system having advanced intelligent spin control structure.
II. METHODS
Automatic steering wheel is a basic and crucial part of a driverless vehicle which is highly recognized as the final trends of the vehicle. In comparison with hydraulically powered systems, the electric power steering (EPS) system is a new power steering system which could provide power when the driver steers. The electronic properties of the EPS are quite desirable for automatic control. A novel automatic steering controller for mass-produced vehicles equipped with an EPS system is presented in this paper. This controller steers the wheel by simulating the torque signals which are generated by human drivers. Considering the nonlinearity and uncertainty of steering systems, fuzzy theories are implemented for this system instead of classic control theories such as a PID controller. This system has been tested on real roads for its effectiveness.
Vehicle dynamics control systems may be used to integrate the driver's steering input together with the four-wheel steering system (4WS) in order to improve the vehicle's dynamic behaviour with respect to yaw rate and body sideslip angle. The goal of this study is to develop a fuzzy logic controller for this purpose. In the first stage of the study, a three-degree of freedom nonlinear vehicle model including roll dynamics is developed. The results of analysis indicate that the dynamic behaviour of the fuzzy logic controlled vehicle is superior with respect to other strategies and front wheel steering vehicle in obtaining zero body sideslip angle even in transient motion and quick response of yaw rate during steady state cornering and lane change manoeuvres. Friction and disturbances of the road are the main sources of nonlinearity in the Electric Power Steering (EPS) System.
Consequently, conventional linear based on a simplified linear model of the EPS system will result in poor dynamic performance or system instability. On the other hand, a brush-type DC motor is more used in EPS control with an input current that is limited in practice. The control laws designed without taking into account the saturation effect may have undesirable consequences on the system stability. In this paper, a Takagi–Sugeno (T−S) fuzzy is used to represent the nonlinear behaviour of an EPS system, and stabilization conditions for nonlinear EPS system with both constrained and saturated control input cases are proposed in terms of linear matrix inequalities (LMI). Simulation results show that both the saturated and constrained controls can stabilize the resulting closed-loop EPS system and provide a stable driving in the presence of nonlinear friction, disturbance of the road and actuator saturation. Methodology flow is describe in further sections of the paper.
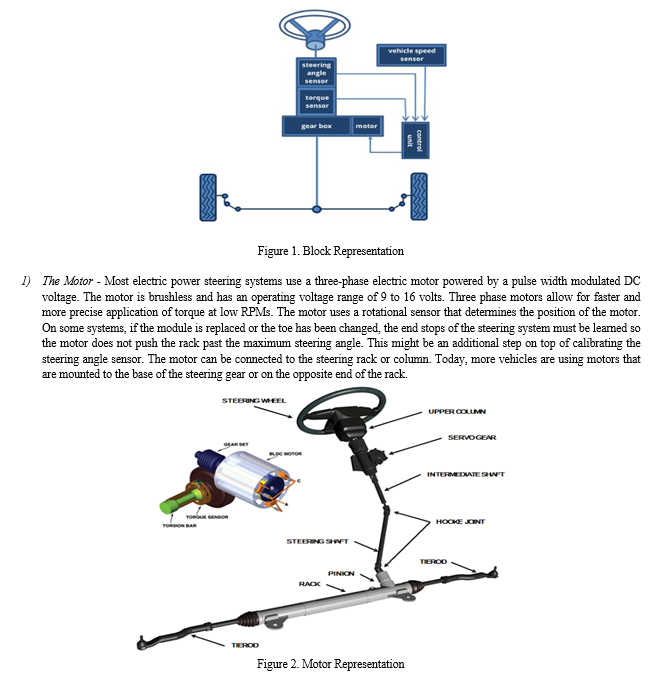
3) Sensor Inputs - Measuring the steering wheel position angle and rate of turn provide critical PBL Project Report Semester 4 information for electric power steering systems. The scan tool will typically display this information in degrees. The steering angle sensor (SAS) is typically a part of a sensor cluster in the steering column. The sensor cluster will always have more than one steering position sensor: Some sensor clusters have three sensors to confirm the data. Some SAS clusters and sensor modules are connected to a Controller Area Network (CAN) bus. The SAS module or cluster can be connected directly to the ABS/ESC module on a CAN bus, or it can be part of the overall CAN Network in a loop that connects various modules in the vehicle. The steering torque sensor measures the steering force applied by the driver and enables sensitive control of the electric steering support. It serves the same function as a spool valve in a hydraulic power steering system.
4) Software - A basic framework of MATLAB, Solidworks, Ansys, Eagle, Embedded, IDE is mandatory. The electric power steering system has sophisticated software that can regulate not only the amount of assist, but also how the steering feels to the driver. The software also regulates the temperature of the motor. OEMs will often release updates for the power steering module. These update can help to resolve intermittent problems and codes that could cause the light to come on and make the system enter into a fail-safe mode.
a. Next-Generation Steering Electric Ford, Power Audi, Mercedes-Benz, Honda and GM are introducing steering systems with variable ratios on some platforms. Some automakers are also calling this adaptive steering.
b. Variable ratio steering changes the relationship between the driver’s actions at the steering wheel and how much the front wheels turn. With variable ratio steering, the ratio continually changes with vehicle speed, optimizing the response in all conditions.
c. At lower speeds, such as when pulling into a parking space or manoeuvring in tight areas, fewer turns of the steering wheel are required. Adaptive steering makes the vehicle more agile and easier to turn as it dials more steering into the road wheel.
d. At highway speeds, the system optimizes steering response, letting the vehicle react more smoothly to each steering input. Systems from Ford and Mercedes-Benz use a precision-controlled actuator placed inside the steering wheel, and require making no changes to a vehicle’s traditional steering system.
A driver unaware of this condition would become concerned if an electrical or electronic failure occurred while the engine was running, as the loss of assist would not be expected. Electronic power steering systems eliminate the need for a pump, hoses and a drive belt connected to the engine using variable amounts of power.
The configuration of an EPS system can allow the entire power assist system to be packaged on the rack and pinion steering gear or in the steering column. The system does not drag on the engine from either a power steering pump or alternator because it will not provide assistance until required by driver input. Also, there is no hydraulic fluid. The steering wheel is referred to as a hand wheel in the service information. The torque, speed and position inputs, vehicle speed signal, and other inputs are interpreted in the electronic control module.


Conclusion
A specific range of vehicle turning can be obtained through proper calculations at this specific angles the vehicle shows the tendency to remain in the range and resulting into a stable and safe drive. Overall vehicle dynamics plays an important role in the stability of the vehicle. The steering angle can be measured with optical sensors, by assessing Hall Effect and through other technologies. Theses sensors measure the movement of the steering wheel in degrees. Digital steering angle sensors measure the angle and turn it into information that can be shared on a serial data bus or discrete connection with a module. Instead of changing voltage, these sensors produce a signal in code that indicates the steering angle. This data PID can be used for electric power steering, intelligent headlights and even stop/start systems. Electric power steering systems can’t typically be fixed by throwing parts at the problem. The rack and module can be very expensive to replace. Steering angle and torque sensors are difficult to swap due to their position on the steering column. An electric power steering module is more than just a circuit board and connectors in an aluminium box. The module contains the drivers, signal generators and MOSFET switches that power and control the electric motor. The module also contains a current monitor circuit that measures the amps the motor is using
References
[1] Present and future of electric power steering Int J of Vehicle design, 15 (1994), pp. 243-254 [2] Yasuo Shi mizu, To shitake kawai. Development of elec-tric power Steering. [3] Variable Effort Steering for Vehicle Stability Enhancement Using an Electric Power Steering System. [4] Ervin, R.D., and Brown, J.L. (2014). \"Model-Based Design for Automotive Systems.\" SAE International Journal of Passenger Cars - Electronic and Electrical Systems, 7(1), 248-254. [5] Gao, Y., et al. (2018). \"An Integrated Model Predictive Control Strategy for Vehicle Stability and Traction Control.\" Vehicle System Dynamics, 56(8), 1146-1168. [6] Rajamani, R., and Piyabongkarn, D. (2001). \"Design and Implementation of a Robust Lateral Control System for Autonomous Highway Vehicles.\" IEEE Transactions on Control Systems Technology, 9(5), 809-818. [7] Ercole, G., et al. (2017). \"An Enhanced Steering Torque Feedback System Based on a Multimodal Approach.\" IEEE Transactions on Intelligent Transportation Systems, 18(10), 2801-2812. [8] Wang, S., and Zhang, L. (2019). \"Adaptive Lateral and Longitudinal Control for Autonomous Vehicles.\" IEEE Transactions on Vehicular Technology, 68(3), 2186-2200. [9] NHTSA - National Highway Traffic Safety Administration. (2019). \"Electronic Stability Control (ESC).\" [Online] Available at: https://www.nhtsa.gov/equipment/electronic-stability-control-esc. [10] SAE International. (2017). \"J2945/1 - Dedicated Short Range Communications (DSRC) Message Set Dictionary.\" [Online] Available at: https://www.sae.org/standards/content/j2945/1_201707/. [11] Lin, Y., and Wu, J. (2013). \"Development and Evaluation of a Stability Control System for Articulated Heavy Vehicles.\" Journal of Transportation Engineering, 139(12), 1197-1206. [12] Society of Automotive Engineers (SAE). (2019). \"J2670 - Vehicle Stability Test Procedure for Class 7 and 8 Trucks and Buses.\" [Online] Available at: https://www.sae.org/standards/content/j2670_201902/.
Copyright
Copyright © 2023 Shubham Kothawade, Sarthak Sawale, Sakshi Tapkir. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET56257
Publish Date : 2023-10-22
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online