

Ijraset Journal For Research in Applied Science and Engineering Technology
Enhanced Road Safety through Integrated Speed Breaker, Pothole, and Lane Detection System
Authors: Jyoti Yadav, Chavan Vijay Gorkasha, Dange Badri Kailasappa, Gawad Onkar Niteen, Nehal Vishnu Ghewade
DOI Link: https://doi.org/10.22214/ijraset.2024.59983
Certificate: View Certificate
Abstract
Amidst the rapid evolution of autonomous vehicle technologies, ensuring road safety remains a paramount challenge. Effective detection of lanes and potential hazards, including speed breakers and potholes, is critical for safe autonomous driving. In this study, we introduce an innovative Lane, Speed Breaker, and Pothole Detection System (LSPDS) utilizing YOLOv4 Tiny, a state-of-the-art object detection algorithm and computer vision techniques. Our system integrates computer vision and machine learning techniques for analysis of road conditions. By employing camera sensors, we capture the road scene and apply image processing algorithms to identify lanes, speed breakers, and potholes. Moreover, the system incorporates Firebase for user authentication and SMS services for real-time alerts. YOLOv4 Tiny is employed for accurate detection and classification of these features within the captured images, thereby enhancing the perception capabilities of autonomous vehicles. This research contributes to advancing road safety in autonomous driving systems by effectively addressing lane detection, speed breaker detection, and pothole detection simultaneously.
Introduction
I. INTRODUCTION
Autonomous vehicles represent the forefront of technological advancement in transportation, offering the potential to transform road safety, alleviate traffic congestion, and improve accessibility. Integration of Lane, Speed Breaker, and Pothole Detection System (LSBPDS) into the perception framework of autonomous vehicles aims to provide timely alerts to the vehicle's control unit, empowering it to make informed decisions.
Identifying speed breakers in advance is crucial for ensuring the vehicle's smooth and controlled navigation, minimizing discomfort to passengers, and reducing the risk of damage to the vehicle's suspension system.
Utilizing a combination of sensor fusion techniques, including LiDAR, radar, and cameras, autonomous vehicles can effectively detect and classify different types of speed breakers, ranging from traditional humps to newer designs such as sinusoidal and rumble strips.
This enables the vehicle's control unit to adjust its speed and suspension settings pre-emptively, ensuring a comfortable and safe ride for occupants by leveraging machine learning, advanced sensor fusion, and real-time data processing, autonomous vehicles equipped with LSBPDS can navigate roads safely and efficiently, paving the way for a future where transportation is not only autonomous but also profoundly safer and more reliable for everyone.
The project aims to develop a comprehensive desktop application for the detection of speed breakers, potholes, and lanes using advanced computer vision techniques, specifically leveraging YOLOv4 Tiny for speed breaker and pothole detection, and computer vision algorithms for lane detection. The application will include registration and login functionality for users to access the system securely.
The application will be designed to handle input from camera sources or from videos, allowing flexibility in integration with different vehicle setups or camera configurations.
Overall, the project aims to deliver a robust desktop application that addresses the critical need for accurate detection of road hazards such as speed breakers, potholes, and lanes, contributing to enhanced safety and efficiency in vehicular transportation systems.
II. LITERATURE REVIEW
|
Paper Name |
Author |
Description |
|
“Real time detection of speed breakers and warning system for on- road drivers” |
Mahbuba Afrin, Md. Redowan Mahmud, Md. Abdur Razzaque |
This paper presents a novel system to address the dangers posed by excessive and unmarked speed breakers on national highways. The system offers autonomous speed breaker detection and warning generation for drivers, while also tracking driver, vehicle, and timing information to identify speed breaker violations in real-time. Compared to existing methods, this system demonstrates superior response time and accuracy, enhancing road safety significantly. |
|
“Speed detection using image processing” |
Pranith Kumar Thadagoppula, Vikas Upadhyaya |
This paper introduces a novel method for vehicle speed detection using image and video processing, offering an alternative to radar technology. By analysing live video streams from surveillance cameras, the system calculates vehicle speeds every half second, facilitating real-time monitoring of speed violations. This approach reduces the need for manual radar monitoring on highways and achieves a low error rate of just 3%. |
|
“Real Time Detection of Roadside Speed Breakers and Obstacles upto Knee-level” |
Prottoy Saha, Muhammad Sheikh Sadi, Md. Atikur Rahman |
This paper presents a navigation guide designed to aid visually impaired individuals in safe navigation, detecting speed breakers. The system comprises six infrared sensors, an Arduino Uno, power supply, three vibration motors, and an earphone. Achieving an overall accuracy of 91%, the framework demonstrates its suitability for users in this domain. |
|
“speed breaker detection and speed reduction using machine learning” |
Rekha B.N, Nafisa, Yashaswini Kumar, Nirupama Thoudam, Unity Chachei |
This paper introduces a machine learning-based approach for detecting speed breakers, achieving promising results. Using a TensorFlow-trained deep learning model deployed as an Android app, the system detects speed breakers in real time with CNN. Data collection was facilitated by Microsoft's Bing Image Search API, and rigorous testing was performed under various conditions, yielding a high detection accuracy of 97.14%. The experiments were conducted on Windows 10 OS using the TensorFlow library. |
|
“Intelligent speed breaker system design for vehicles using Internet of Things” |
Sarah Biswal, Ishika Chandra, S.K. Sinha, Kamlesh Pandey |
Foggy conditions and nighttime driving in India lead to accidents, mainly due to drivers not noticing speed breakers. This paper suggests an intelligent speed breaker system using RF technology to detect speed breakers early, warning drivers and automatically slowing down vehicles if necessary. By leveraging IoT and GPS, the system sends speed breaker locations to the cloud to prevent accidents proactively.
|
III. METHODOLOGY
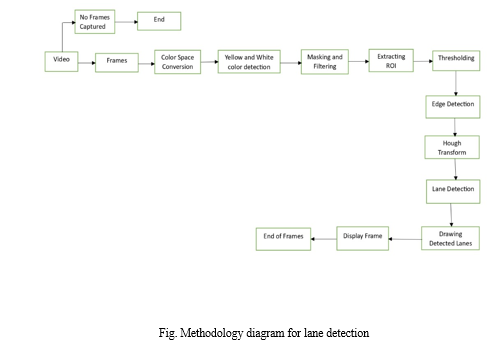
A methodology for a detection of speed breaker, lane and potholes can be outlined as follows:
- Data Collection: In order to make use of this system use cameras to capture high-resolution pictures and videos of roads. Gather information on different kinds of roads, illumination, and climate to make sure the detecting system is reliable.
- Speed Breaker Detection: Based on distinguishing characteristics including shape, colour, and texture, speed breakers can be located using image processing algorithms. Utilize edge detection methods to identify sudden elevation changes that could be signs of speed breakers. Teach a convolutional neural network or other machine learning model to identify features that should be classified as speed breakers.
- Pothole Detection: To find areas of the road surface with imperfections, use picture segmentation techniques. Examine differences in texture and colour to help you differentiate potholes from other sections of the road. Use feature extraction techniques to calculate the size and depth of detected potholes.
- Lane Detection: To identify lane markings on the road surface, use image processing methods like the Hough Transform. Divide the picture into separate areas that represent the various lanes. To verify detected lane markers and identify lane borders, use geometric limitations.
- Integration: To build an integrated road safety system, combine the outputs of the lane detection, pothole, and speed breaker modules. Integrate data from several detection modules to provide drivers thorough feedback instantly. To coordinate the functionalities of communication, analysis, and detection, implement a centralize control unit.
- Evaluation: Make use of actual road data to gauge how well the integrated detection system is performing. Evaluate each speed breaker, pothole, and lane detection module separately for accuracy and dependability. Analyse how well the integrated system has improved road safety through field testing
- Deployment: Integrate the finalized detection system into real time uses for vehicles, roadside infrastructure, or mobile applications. Provide user interfaces for drivers to receive real-time alerts about road conditions. Collaborate with transportation authorities and stakeholders to deploy the system in areas with high road safety risks.

IV. IMPLEMENTATION
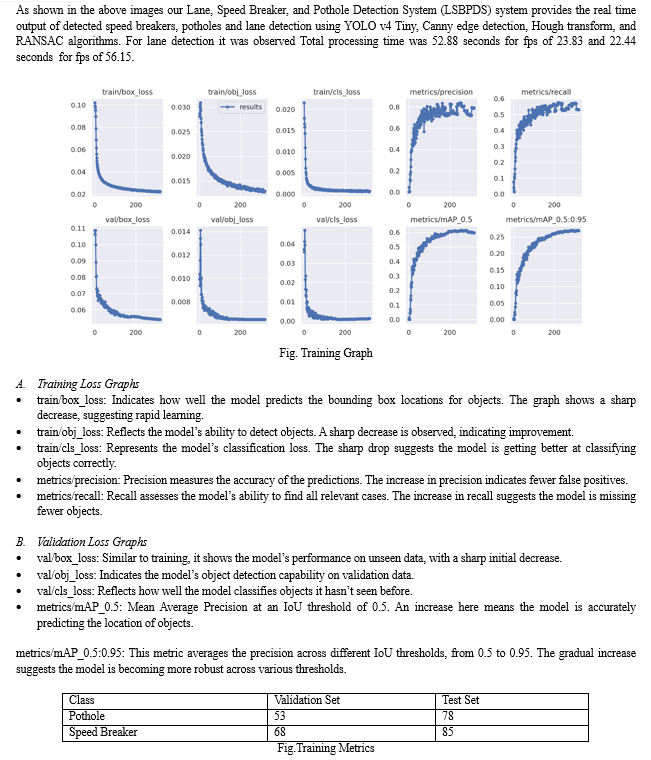
In our System YOLO v4 Tiny, Canny edge detection, Hough transform, and RANSAC algorithms are utilized in speed breaker, pothole, and lane detection.
- YOLO (You Only Look Once) v4 Tiny is a state-of-the-art object detection algorithm used for detecting objects, including speed breakers and potholes, in images or video frames. YOLO v4 Tiny can be trained on labelled datasets containing images with annotated speed breakers and potholes. Once trained, the YOLO model can accurately detect speed breakers and potholes in real-time images or video streams, providing bounding boxes around the detected objects.
- Canny edge detection is utilized in lane detection to identify the edges of the lanes on the road. Hough transform is commonly used in lane detection to identify lines representing lane markings. In the context of speed breaker and pothole detection, Hough transform can also be employed to detect lines or circles representing the edges of speed breakers or potholes. By analysing the Hough space, lines or circles corresponding to the detected features can be identified.
- RANSAC (Random Sample Consensus) algorithm is used to robustly estimate model parameters in the presence of outliers. In Lane detection, RANSAC can be applied to fit models (such as lines or circles) to the detected edges or features. RANSAC helps in filtering out outliers, which may occur due to noise or irregularities in the road surface, ensuring accurate estimation of the parameters representing the detected features.
These algorithms work in tandem to detect and accurately locate speed breakers, potholes, and lane markings on the road, thereby contributing to safer and more efficient driving experiences.



VI. FUTURE SCOPE
Continued research and development can lead to the refinement and optimization of detection algorithms for speed breakers, potholes, and lane markings. Incorporating deep learning techniques, such as advanced neural network architectures or reinforcement learning, could further improve the accuracy and efficiency of detection. As autonomous vehicle technology continues to evolve, integrating the detection system with autonomous driving systems can enhance vehicle navigation and safety. The system could provide real-time hazard information to autonomous vehicles, enabling proactive avoidance and navigation around road hazards. Implementing crowdsourcing capabilities within the system can facilitate the collection of real-time road hazard data from users. Users could report detected hazards, contributing to a dynamic and comprehensive hazard database for improved hazard awareness and navigation. Overall, the future scope of the speed breaker, pothole, and lane detection system encompasses technological advancements, collaboration opportunities, and innovative applications aimed at enhancing road safety, improving transportation efficiency, and creating smarter and safer road networks.
Conclusion
The proposed speed breaker, pothole, and lane detection system represents a significant advancement in road safety technology, offering a comprehensive solution for identifying and mitigating potential hazards on roadways. By leveraging sophisticated detection algorithms, user-friendly interfaces, and real-time data processing capabilities, the system aims to enhance driver awareness, improve navigation accuracy, and ultimately contribute to safer and more efficient transportation networks. Through the integration of machine learning algorithms, such as YOLOv4 Tiny for object detection and computer vision techniques for lane recognition, the system demonstrates remarkable accuracy and reliability in identifying speed breakers, potholes, and lane markings. This capability enables timely alerts to drivers, allowing them to take proactive measures to avoid potential road hazards and navigate challenging driving conditions with confidence.
References
[1] L. Zhang, F. Jiang, B. Kong, J. Yang, and C. Wang, ‘‘Real-time lane detection by using biologically inspired attention mechanism to learn contextual information,’’ Cogn. Comput., vol. 13, pp. 1333–1344, Sep. 2021, doi: 10.1007/s12559-021-09935-5. [2] R. Zhang, Y. Wu, W. Gou, and J. Chen, ‘‘RS-lane: A robust lane detection method based on ResNeSt and self-attention distillation for challenging traffic situations,’’ J. Adv. Transp., vol. 2021, pp. 1–12, Aug. 2021. [3] J. Li, F. Jiang, J. Yang, B. Kong, M. Gogate, K. Dashtipour, and A. Hussain, ‘‘Lane-DeepLab: Lane semantic segmentation in automatic driving scenarios for high-definition maps,’’ Neurocomputing, vol. 465, pp. 15–25, Nov. 2021, doi: 10.1016/j.neucom.2021.08.105. [4] D. Kavitha and S. Ravikumar, ‘‘Designing an IoT based autonomous vehicle meant for detecting speed bumps and lanes on roads,’’ J. Ambient Intell. Hum. Comput., vol. 12, no. 7, pp. 7417–7426, Jul. 2021, doi: 10.1007/s12652-020-02419-8. [5] https://medium.com/analytics-vidhya/train-a-custom-yolov4-tiny-object-detector-using-google-colab-b58be08c9593 [6] https://haobin-tan.netlify.app/ai/computer-vision/object-detection/train-yolo-v4-custom-dataset/ [7] https://blog.roboflow.com/object-detection/ [8] https://www.geeksforgeeks.org/opencv-real-time-road-lane-detection/ [9] https://medium.com/@Adekola_Olawale/firebase-authentication-413626c5234d [10] https://www.twilio.com/docs/messaging/quickstart/python [11] Detection of Lane and Speed Breaker Warning System for Autonomous Vehicles Using Machine Learning Algorithm. Prof.J.H. Yadav1 , V.G.Chavan2 , B.K.Dange3 , N.V.Ghewade4 , O.N.Gawad5 Department of Computer Engineering, Savitribai Phule Pune University, India.https://doi.org/10.22214/ijraset.2023.56473
Copyright
Copyright © 2024 Jyoti Yadav, Chavan Vijay Gorkasha, Dange Badri Kailasappa, Gawad Onkar Niteen, Nehal Vishnu Ghewade. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET59983
Publish Date : 2024-04-08
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online