

Ijraset Journal For Research in Applied Science and Engineering Technology
Extraction of Main Urban Roads from High Resolution Satellite Images by Machine Learning
Authors: Dr. R Bhargav Ram, Anurag U, Sriyansh S, B Sai Raju
DOI Link: https://doi.org/10.22214/ijraset.2024.63248
Certificate: View Certificate
Abstract
The project endeavors to tackle the critical task of urban road extraction from high-resolution satellite imagery by harnessing the power of machine learning techniques. In today\'s rapidly developing urban landscape, the necessity for accurate and up- to-date road maps is paramount for effective urban planning, efficient traffic management, and seamless navigation systems. However, traditional manual extraction methods are hindered by their time-consuming nature and their inability to handle the ever-growing volume of satellite image data. To overcome these challenges, the study delves into the realm of automatic road extraction systems. Despite significant strides made in this field, extracting urban roads from high-resolution remote sensing imagery remains a complex endeavor due to the diverse textures and gray levels inherent in varied road surfaces and the intricate urban environments they traverse.At the forefront of this endeavor lies the primary objective: to propose a novel approach for automatic road extraction utilizing machine learning methodologies. The proposed method entails the extraction of a plethora of road-specific features, including but not limited to, the ratio of bright regions, edge direction consistency, and local binary patterns. These extracted features serve as inputs to a learning framework, with AdaBoost emerging as the chosen algorithm for training classifiers and identifying the most pertinent features. The process of road detection is facilitated through a sliding window approach, leveraging the insights gleaned from the learning framework and validating road connectivity to ensure accuracy and reliability. Experimental validation using real Quickbird images serves as a testament to the efficacy and robustness of the proposed method. These experiments not only validate the approach but also provide insights into its real-world applicability and potential. By showcasing the effectiveness of the proposed method in accurately extracting urban roads from high-resolution satellite imagery, this research significantly contributes to the advancement of automated urban road extraction techniques. These techniques play a pivotal role in ensuring the currency and accuracy of geographic information systems, particularly in the context of rapidly evolving urban landscapes. In essence, this project represents a concerted effort to bridge the gap between the burgeoning availability of satellite image data and the imperative need for accurate road maps in urban planning and management. By harnessing the capabilities of machine learning, specifically AdaBoost, and leveraging a diverse array of road-specific features, the proposed method offers a promising solution to the complex and challenging task of urban road extraction. As urban environments continue to evolve, the need for automated techniques to keep pace with these changes becomes increasingly urgent. Thus, this research serves as a beacon of innovation, paving the way for enhanced automation and efficiency in urban road extraction processes, thereby facilitating more informed decision-making and fostering sustainable urban development.
Introduction
I. INTRODUCTION
The history of urban road extraction from high- resolution satellite images has undergone a remarkable evolution, transitioning from manual cartographic methods to sophisticated machine learning techniques. In the pre-computer era, skilled cartographers and surveyors painstakingly created road maps by hand. With the advent of remote sensing technology in the 1970s and 1980s, the process shifted towards digitizing roads from aerial photographs, albeit limited by the resolution of available satellite data. The late 20th century witnessed the emergence of computer vision and photogrammetry, with initial attempts at automating road network identification. However, it was not until the 21st century, with the abundance of high-resolution satellite imagery, that machine learning techniques took center stage. Through the utilization of features such as bright region ratios, edge consistency, and local binary patterns, coupled with algorithms like AdaBoost, automated systems for efficiently and accurately extracting urban roads were developed. This transformative era in road extraction, driven by the synergy between high-resolution satellite imagery and machine learning, addresses the urgent need for up-to- date road maps in rapidly growing urban areas. Such maps empower decision-makers in urban planning, traffic management, and navigation systems.
The historical progression from manual methods to data- driven methodologies underscores the importance of adapting to evolving technology and urban development, ultimately enhancing the accessibility and accuracy of geographic information systems for various applications in the modern world.
The existing methodologies for urban road extraction predominantly integrate computer vision, remote sensing, and machine learning techniques. These systems aim to automate the process of identifying and mapping urban roads, overcoming the limitations associated with manual extraction. Notably, deep learning frameworks employing Convolutional Neural Networks (CNNs) for feature extraction and road segmentation have gained prominence. Ensemble learning methods like Random Forest and decision trees have also been utilized for classifying road pixels. Additionally, Object-Based Image Analysis (OBIA) systems segment satellite images into meaningful objects, aiding in road extraction. Some systems combine automated extraction with manual validation, allowing analysts to refine and validate the extracted road network.
Moving forward, the project aims to leverage machine learning capabilities alongside high-resolution satellite imagery to extract main urban roads. A comprehensive literature survey forms the foundation, exploring various studies on road extraction using machine learning techniques. Based on this survey, a novel methodology is proposed, integrating Adaboost, the Local Binary Patterns (LBP) algorithm, and post-processing techniques to achieve accurate road detection crucial for urban planning. Data collection and preprocessing are essential steps, involving the acquisition and preparation of data from platforms like Kaggle and Google Colab's cloud infrastructure. The project's implementation phase encompasses the development and integration of the machine learning model, while the evaluation phase assesses model performance using specific metrics and validation procedures. The results and discussion section presents the extracted road maps and evaluates the model's performance, highlighting any limitations. In conclusion, the project aims to contribute to the advancement of automated road extraction systems, addressing the growing demand for accurate and up-to-date road information in urban areas.
II. RELATED WORKS
Hings Stefen et.al [1], we present work on automatic road extraction from high resolution aerial imagery taken over urban areas. In order to deal with the high complexity of this type of scenes, we integrate detailed knowledge about roads and their context using explicitly formulated scale-dependent models. The knowledge about how and when certain parts of the road and context model are optimally exploited is condensed in the extraction strategy. To exploit information from multiple views, a fusion strategy for road objects (e.g. lanes) has been developed. Hui long et.al[2],This paper presents an integrated system for automatic extraction of main roads in high-resolution optical satellite images. It employs a multi-scale greylevel morphological cleaning algorithm to enhance road region visibility. A mean shift algorithm segments the image into a simplified map based on greylevel differences. Potential road surfaces are identified, and a binary image is created using greylevel thresholding.
Mohamad naouai et.al[3],Road extraction research has always been an active research on automatic identification of remote sensing images. With the availability of high spatial resolution images from new generation commercial sensors, how to extract roads quickly, accurately and automatically has been a cutting edge problem in remote sensing related fields. In this paper, we present a novel road extraction approach which uses a scale space segmentation and two measures of the shape index to filter all regions from the result of the segmentation.
Aleksey boyko et.al[4],This paper describes a method for extracting roads from a large scale unstructured 3D point cloud of an urban environment consisting of many superimposed scans taken at different times. Given a road map and a point cloud, our system automatically separates road surfaces from the rest of the point cloud. Starting with an approximate map of the road network given in the form of 2D intersection locations connected by polylines, we first produce a 3D representation of the map by optimizing Cardinal splines to minimize the distances to points of the cloud under continuity constraints. We then divide the road network into independent patches, making it feasible to process a large point cloud with a small in-memory working set. For each patch, we fit a 2D active contour to an attractor function with peaks at small vertical discontinuities to predict the locations of curbs. Finally, we output a set of labeled points, where points lying within the active contour are tagged as “road” and the others are not.
Dandong Yin et.al[5],Typical object-based classification methods only take image object properties as criteria to classify roads, leaving the associated edge information unused. These methods often lead to fragmented road areas and inconsistent road widths and smoothness. Meanwhile, very-high-resolution (VHR) images contain a large amount of edge information and different types of geographic objects, thus, it is challenging to extract roads by typical edge-based extraction or grouping methods. In this study, a globally optimized method is developed to integrate both object and edge features to extract urban road information from VHR images. This novel method extends ant colony optimization (ACO) through deploying and moving ants (artificial agents) along roads with the guidance of comprehensive object and edge information.
Zelang miao et.al[6],This paper presents a novel method exploiting fusion at the information level for urban road extraction from very high resolution (VHR) optical satellite images. Given a satellite image, we explore spectral and shape features computed at the pixel level, and use them to select road segments using two different methods (i.e., expectation maximization clustering and linearness filtering). A road centerline extraction method, which is relying on the outlier robust regression, is subsequently applied to extract accurate centerlines from road segments. After that, three different sets of information fusion rules are applied to jointly exploit results from these methods, which offer ways to address their own limitations. Two VHR optical satellite images are used to validate the proposed method.
Rasha alshehhi et.al[7],Extraction of road networks in urban areas from remotely sensed imagery plays an important role in many urban applications (e.g. road navigation, geometric correction of urban remote sensing images, updating geographic information systems, etc.). It is normally difficult to accurately differentiate road from its background due to the complex geometry of the buildings and the acquisition geometry of the sensor. In this paper, we present a new method for extracting roads from high-resolution imagery based on hierarchical graph-based image segmentation. The proposed method consists of: 1. Extracting features (e.g., using Gabor and morphological filtering) to enhance the contrast between road and non-road pixels, 2. Graph-based segmentation consisting of (i) Constructing a graph representation of the image based on initial segmentation and (ii) Hierarchical merging and splitting of image segments based on color and shape features, and 3. Post-processing to remove irregularities in the extracted road segments. Experiments are conducted on three challenging datasets of high- resolution images to demonstrate the proposed method and compare with other similar approaches.
Renbao Lian et.al[8],Road extraction from high-resolution remote sensing images is a challenging but hot research topic in the past decades. A large number of methods are invented to deal with this problem. This article provides a comprehensive review of these existing approaches. We classified the methods into heuristic and data-driven. The heuristic methods are the mainstream in the early years, and the data-driven methods based on deep learning have been quickly developed recently. With regard to the heuristic methods, the road feature model is first introduced, then, the classic extraction methods are reviewed in two subcategories: semiautomatic and automatic.
You Wu Quanhua et.al [9],To extract complicated road network from remote sensing images on urban scenes, this article presents a clustering point process (CPP) based network topology structure constrained road extraction algorithm. Firstly, the CPP is constructed to model the feature points, such as endpoints, bends, and crossroads in a road system. Based on that, an initial network topology structure is constructed by connecting the points with lines. Then, according to the network structure characteristic and the spectral characteristic of road, a network topology structure constraining model and a spectral measurement constraining model are constructed, respectively. By combining the models above, a road extraction model is built under the framework of Bayes’ theorem. Finally, to simulate from the road extraction model and extract an optimal road network, a solution strategy, reversible jump Markov Chain Monte Carlo (RJMCMC) simulation algorithm with related transfer operations, is designed according to the CPP and network topology structure. Several high- resolution remote sensing images on urban scenes are tested.
Ziyi Chen et.al[10],Automated extraction of roads from remotely sensed data come forth various usages ranging from digital twins for smart cities, intelligent transportation, urban planning, autonomous driving, to emergency management. Many studies have focused on promoting the progress of methods for automated road extraction from aerial and satellite optical images, synthetic aperture radar (SAR) images, and LiDAR point clouds. In the past 10 years, no a more comprehensive survey on this topic could be found in literature.
III. PROPOSED METHODOLOGY
The proposed automatic approach for building comprehensive road models leverages machine learning techniques to address the challenges associated with road recognition in urban environments. The approach encompasses three main steps, each designed to effectively extract road features and accurately detect road networks. In the first step, a series of features reflecting various road characteristics are extracted from the input satellite imagery. These features include the ratio of bright lines on the road surface, the directional consistency of road markings, and local binary patterns (LBP). These features serve as crucial indicators of road presence and facilitate the subsequent stages of the road detection process.
Once the features are extracted, they are input into a learning container, where machine learning algorithms are employed to train classifiers and select distinct features. Specifically, the AdaBoost algorithm is utilized in this step to effectively learn from the extracted features and identify patterns indicative of road structures. AdaBoost is a popular ensemble learning method that iteratively combines weak classifiers to construct a strong classifier, thereby improving classification accuracy. By leveraging AdaBoost, the proposed approach aims to enhance the robustness and reliability of the road detection process by effectively capturing the diverse characteristics of urban roads.
In the final step of the proposed approach, roads are detected using a sliding window technique, guided by the learned classifiers and feature selection from the previous steps. This sliding window approach involves systematically scanning the input imagery with a window of predefined size and moving it across the image to detect road segments. The detected road segments are then validated by combining road connectivity information, ensuring the coherence and continuity of the identified road networks. This validation step helps mitigate false positives and ensures that only genuine road features are retained in the final output.
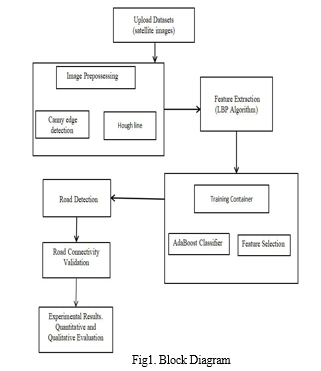
To implement the project, several key techniques and modules have been identified, each playing a crucial role in automating the road extraction process from high-resolution satellite images. The project begins with the input images module, where satellite images are uploaded into the system. Subsequently, the Canny Edge Detection technique is employed to extract edges from the images, followed by the application of the Hough Transformation to identify straight lines indicative of roads. The Local Binary Patterns (LBP) algorithm is then utilized to extract features from the identified road segments. These extracted features serve as input to the AdaBoost learning algorithm, which trains a model to accurately classify road structures. Finally, the trained AdaBoost model is applied to test images to extract roads effectively.
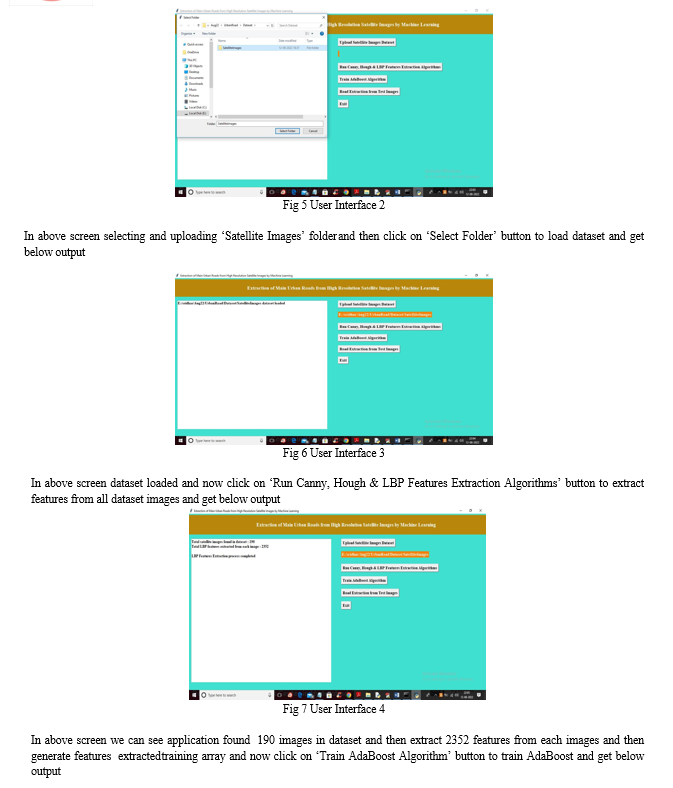
The project is organized into several modules to streamline the implementation process. The Upload Satellite Images Dataset module allows for the seamless uploading of satellite image datasets into the application. The Run Canny, Hough & LBP Features Extraction Algorithms module reads the uploaded images and extracts features using the Canny Edge Detection, Hough Transformation, and LBP techniques. Subsequently, the Train AdaBoost Algorithm module inputs the extracted features into the AdaBoost algorithm for model training. Finally, the Road Extraction from Test Images module facilitates the extraction of roads from test images using the trained AdaBoost model.
Several advantages accompany the proposed approach to road extraction from high-resolution satellite images. The use of machine learning techniques, particularly AdaBoost, enhances efficiency by automating feature extraction and classifier training, thereby streamlining the road detection process. Moreover, leveraging machine learning algorithms improves accuracy by effectively learning from extracted features and identifying patterns indicative of road structures. The comprehensive approach, encompassing feature extraction, classifier training, and road detection, increases the robustness of the system, while its modular design offers flexibility and adaptability to different datasets and environments. By reducing manual intervention, the proposed approach minimizes human error and labor-intensive tasks, contributing to overall efficiency.
Furthermore, the system offers the potential for real-time road detection from satellite imagery, enabled by efficient feature extraction and machine learning-based classification. Its modular architecture allows for scalability, facilitating the integration of additional features or optimization techniques to further enhance road detection performance. Overall, the proposed approach represents a significant step forward in automating the extraction of roads from high-resolution satellite images, offering numerous advantages in terms of efficiency, accuracy, robustness, adaptability, reduced manual intervention, real-time detection capabilities, and scalability.
The Software Requirements Specification (SRS) outlines the comprehensive description of a software system, encompassing both functional and non-functional requirements. In this context, the economic feasibility of the system is evaluated based on the cost of development versus the anticipated benefits. Operational feasibility ensures that the proposed system aligns with the organization's operational requirements and user expectations, thereby minimizing resistance to adoption. Technical feasibility confirms the system's viability, highlighting its web-based user interface and database functionality to facilitate workflow management. External interface requirements specify the user interface, hardware, and software interfaces necessary for system operation. The system requirements detail hardware specifications, including processor, speed, RAM, hard disk, keyboard, mouse, and monitor, along with software requirements such as the operating system (Windows 10) and programming language (Python). Together, these specifications form the foundation for the development and implementation of the software system, ensuring its functionality, usability, and compatibility with existing infrastructure.
IV. IMPLEMENTATION & RESULTS
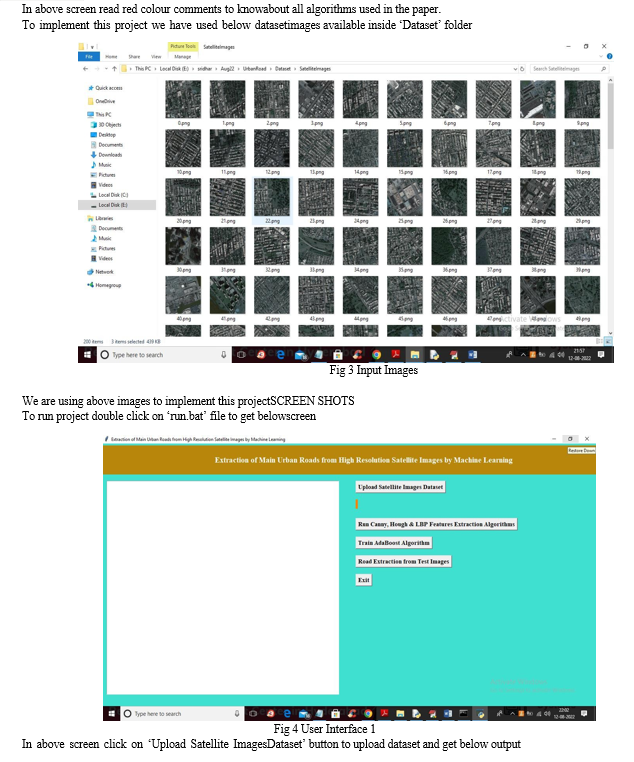
The implementation of the proposed automatic road detection approach involves several key steps. Initially, a dataset of satellite images covering urban environments is collected, ensuring adequate resolution and coverage for effective road detection. Feature extraction plays a crucial role in the process, starting with the application of Canny Edge Detection to extract edges from the input images, followed by Hough Transformation to identify straight lines indicative of road segments, and the utilization of Local Binary Patterns (LBP) to capture texture information associated with road surfaces. These extracted features are then input into the AdaBoost algorithm for classifier training, where patterns indicative of road structures are learned and identified.
AdaBoost iteratively combines weak classifiers to construct a strong classifier, thereby enhancing classification accuracy. Subsequently, a sliding window approach is employed to systematically scan the satellite imagery, and the trained AdaBoost classifier is applied to each window to detect road segments. Finally, the detected road segments are validated using road connectivity information to ensure coherence and mitigate false positives. The implementation also involves designing modular components for each step of the process, including data uploading, feature extraction, classifier training, and road extraction, and integrating them into a cohesive workflow for seamless processing. Testing and evaluation of the system's performance are conducted using various metrics, and adjustments are made as needed to optimize performance and address any challenges encountered during testing.
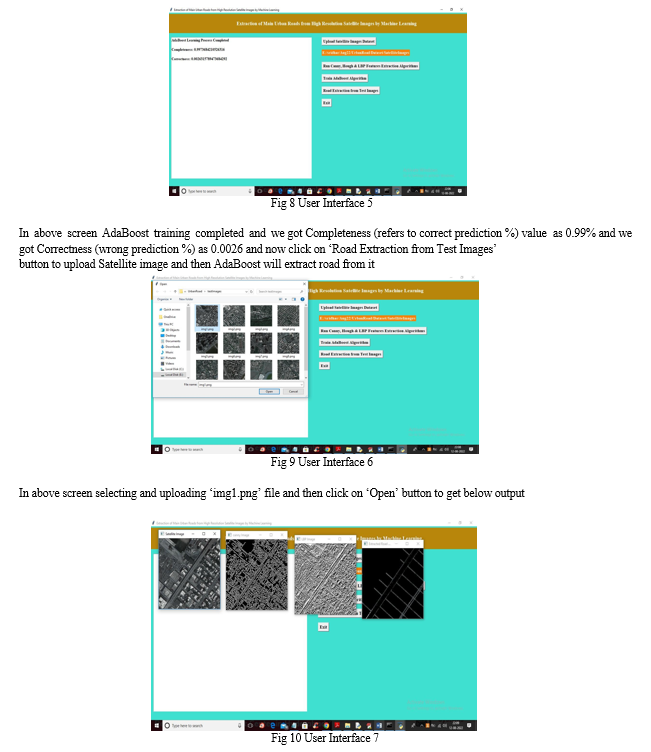
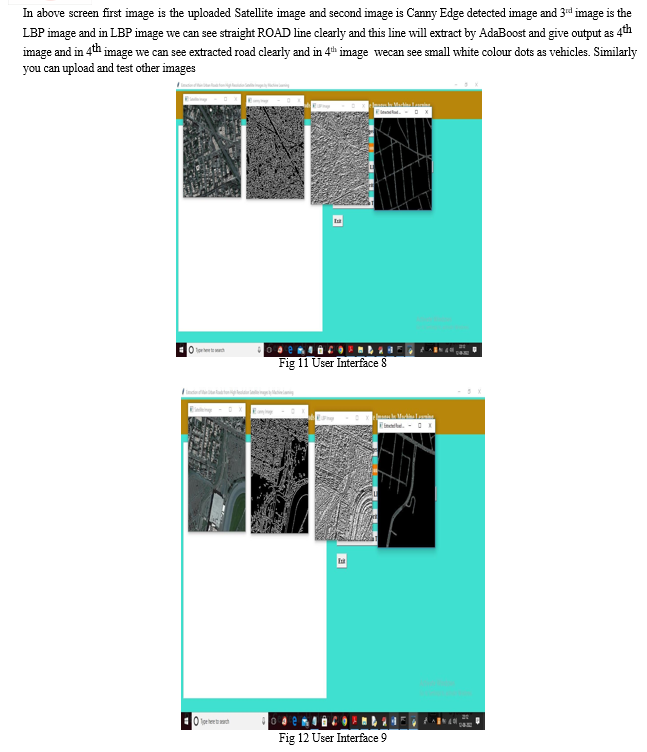
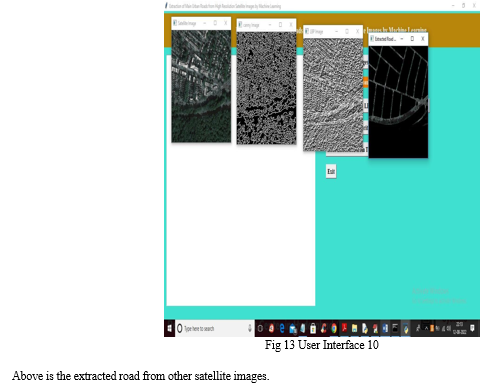
In below screen we are showing code for above method implementations
Conclusion
This Project addresses the critical task of urban road extraction from high-resolution satellite imagery using machine learning techniques, aiming to meet the increasing demand for up-to-date road maps in urban planning, traffic management, and navigation. The proliferation of satellite image data presents challenges for traditional manual extraction methods, necessitating the exploration of automatic road extraction systems. Despite significant efforts in this domain, extracting urban roads from high-resolution remote sensing imagery remains complex due to the diverse road textures and gray levels resulting from varied road surfaces and complex urban environments.
References
[1] Hinz, Stefan. \"Automatic road extraction in urban scenes and beyond.\" International Journal of Photogrammetry and Remote Sensing 35.PART B3 (2004): 349-355. [2] Long, Hui, and Zhongming Zhao. \"Urban road extraction from high-resolution optical satellite images.\" International Journal of Remote Sensing 26.22 (2005): 4907-4921. [3] Naouai, Mohamed, Atef Hamouda, and Christiane Weber. \"Urban road extraction from high-resolution optical satellite images.\" Journal of image analysis and recognition 2010, Póvoa de Varzin, Portugal, June 21-23, 2010 [4] Boyko, Aleksey, and Thomas Funkhouser. \"Extracting roads from dense point clouds in large scale urban environment.\" ISPRS Journal of Photogrammetry and Remote Sensing 66.6 (2011): S2-S12. [5] Yin, Dandong, et al. \"A direction-guided ant colony optimization method for extraction of urban road information from very-high- resolution images.\" IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 8.10 (2015): 4785-4794. [6] Miao, Zelang, et al. \"Information fusion for urban road extraction from VHR optical satellite images.\" IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 9.5 (2016): 1817-1829. [7] Alshehhi, Rasha, and Prashanth Reddy Marpu. \"Hierarchical graph-based segmentation for extracting road networks from high-resolution satellite images.\" ISPRS journal of photogrammetry and remote sensing 126 (2017): 245-260. [8] Lian, Renbao, et al. \"Road extraction methods in high-resolution remote sensing images: A comprehensive review.\" IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 13 (2020): 5489-5507. [9] Wu, You, et al. \"Clustering point process based network topology structure constrained urban road extraction from remote sensing images.\" IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 15 (2022): 2087-2098.
Copyright
Copyright © 2024 Dr. R Bhargav Ram, Anurag U, Sriyansh S, B Sai Raju . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET63248
Publish Date : 2024-06-11
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online