

Ijraset Journal For Research in Applied Science and Engineering Technology
Four Quadrant Operation of DC Motor Controlled by Android Application
Authors: Prof. Ms. N.N. Shaikh, Atif Shaikh, Musa Shaikh, Umar Shaikh, Mhalappa Kore, Sanjay Kolhe
DOI Link: https://doi.org/10.22214/ijraset.2024.61903
Certificate: View Certificate
Abstract
The project is designed to develop a four quadrant speed control system for a DC motor. The motor is operated in four quadrants i.e. clockwise; counter clock-wise, forward brake and reverse brake. It also has a feature of speed control. The four quadrant operation of the dc motor is best suited for industries where motors are used and as per requirement as they can rotate in clockwise, counter-clockwise and also apply brakes immediately in both the directions. In case of a specific operation in industrial environment, the motor needs to be stopped immediately. In such scenario, this proposed system is very apt as forward brake and reverse brake are its integral features. Instantaneous brake in both the directions happens as a result of applying a reverse voltage across the running motor for a brief period and the speed control of the motor can be achieved with the PWM pulses generated by the microcontroller. The microcontroller used in this project is from 8051 family. Remote operation is achieved by any smart-phone/Tablet etc., with Android OS, upon a GUI (Graphical User Interface) based touch screen operation. Bluetooth device is provided to connect with android application device for the operation of the motor which are interfaced to the microcontroller that provides an input signal to it and in turn controls the speed of the motor through a motor driver IC. This project can be enhanced by using higher power electronic devices to operate high capacity DC motors. Regenerative braking for optimizing the power consumption can also be incorporated.
Introduction
I. INTRODUCTION
The main goal of the project is to develop a speed control system for a dc motor for all quadrants with the help of a four quadrant unity to control clock wise, counter clockwise forward brake and reverse brake modes of a dc motor. The system is very useful for industries operation since industries usually require dc motor to operate in all four quadrants for various operational cases. The four quadrant operation of the dc motor is best for industries where motors are used and as per requirement as they can rotate in clockwise, counter-clockwise and also apply brakes immediately in both directions. In case of a specific operation in industrial environment, the motor needs to be stopped immediately. In such scenario, this proposed system is very important as forward brake and reverse brake is its integral feature. Instantaneous brake in both the directions happens as a result of applying a reverse voltage across the running motor for a short period. This project in future can be improved by using high power electronic devices to operation high capacity dc motors. Regenerative braking for optimising the power consumption can also be incorporated. The system is very useful for industrial operation since industries usually require dc motor to operate in all four quadrants for various operational cases. This system enables to operate motors in all four quadrants. The main intention of this project is to control the speed of a DC motor in alternative directions using speed control unit and to operate the motor in four quadrants: ie, clockwise, counter clock-wise, forward brake and reverse brake. This system uses an H-bridge motor drive IC for controlling the DC motor from corresponding switches used by the user for pressing. The four switches are connected to the circuit for controlling the movement of the motor. One slide switch interfaced to the circuit is for controlling the alternative direction of the DC motor The relays are used for changing the polarities of the motor as well as to apply brake to the motor. In the regenerative mode, the current is applied to the circuit in such a way that a revere torque is produced to stop the motor instantaneously. This project in future can be improved by using higher-power electronic devices to operate high- capacity DC motors. Regenerative braking for optimizing the power consumption can also be incorporated.
II. PROBLEM STATEMENT
The same application is used in many areas such as to control the rudder of aeroplane, electric bicycle or an electric car. The motor is built from a stationary magnet and rotating coils. The brushes supply electric current to the coil that is close to the motor magnet pole pieces. As the rotor turns, the polarity of each coil is reversed and sustained rotation of motor is achieved. The direction of rotation depends on the polarity of brushes. The torque applied on the rotor depends on the current passing through the coils. The steady speed depends on the current flowing through the coils and load being driven by the motor.
III. LITERATURE REVIEW
The project is designed to develop a four-quadrant speed-control system for a DC motor. The Motor is operated in four quadrants: clockwise, counter clock-wise, forward brake and reverse brake. It also has a feature of speed control. The four-quadrant operation of the DC motor is best suited for industries where motors are used according to the requirement. They can rotate in clockwise, directions and also one can apply brakes immediately in both the directions. In case of specific operation in industrial environment, the motor needs to be stopped immediately. In such scenario, this proposed system is very apt as forward brake and reverse brake are its integral features. Instantaneous brake in both the directions happens as a result of applying a reverse voltage across the running motor for a brief period and the speed control of the motor can be achieved with PWM pulses generated by the Arduino Board. Arduino Development Board is used for this operation. Push buttons are provided for the operation of the motor which are interfaced to the Arduino that provides input signal to it and in turn controls the speed of the motor through a motor driver IC. Speed control feature by push-button operation is also available in this project.
IV. OBJECTIVE
This project is all about the wireless operation of a DC Motor. In this project, we will control the speed of a DC Motor. Direction of the rotation will also be controlled. Wireless facility is provided with the help of Bluetooth connectivity. An android handset is required to control the operation. As the name suggests that “Speed and Direction Control of DC Motor using Android Mobile Application” is controlling the speed of a DC motor with any mobile phone containing some medium of connectivity such as Bluetooth.
V. BLOCK DIAGRAM
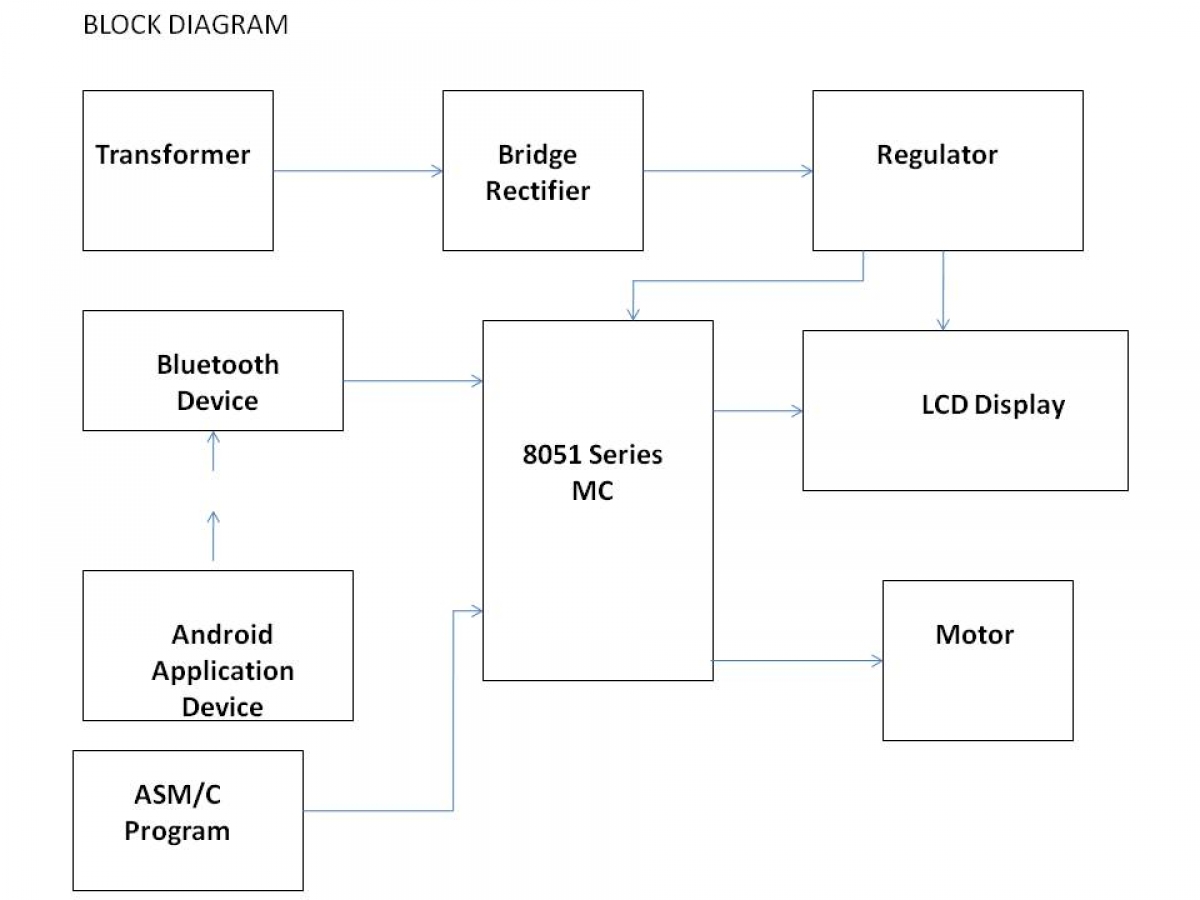
Figure 1. Block Diagram of a system
VI. HARDWARE SECTION SPECIFICATION AND WORKING
The following procedures are carried out for the for the four quadrant DC motor speed control operation using microcontroller. Here seven switches are interfaced to MC to control the speed of motor in four quadrants. When start switch is pressed the motor starts rotating in full speed being driven by a motor driver IC L293D that receives control signal continuously from the microcontroller. When clockwise switch is pressed the motor rotates in forward direction as per the logic provided by the program from the microcontroller to the motor driver IC. While forward brake is pressed a reverse voltage is applied to the motor by the motor driver IC by sensing reverse logic sent by the microcontroller for a short time period due to and reverse brake switch is pressed the microcontroller delivers a logic to the motor driver IC that develops for very small time a reverse voltage across the running motor due to which instantaneous brake situation happens to the motor. PWM switch is used to rotate the motor at varying speed by delivering from the microcontroller a varying duty cycle to the enable pin of the motor driver IC. It starts from 100% duty cycle and reduces in steps of 10% when it is pressed again and finally reaches to 10% duty cycle and the process repeats. Stop button is used to switch OFF the motor by driving the enable pin to ground from the microcontroller command accordingly.
VII. WORKING
In this project step down transformer is used. After that bridge rectifier and regulator circuit is used for getting constant voltage . Speed control circuit is used. The system is very useful for industrial operation since industries usually require DC motors to operate in all four quadrants for various operational cases. Our system enables to operate motors in all four quadrants. Well most industrial scenarios dc motors are required to run in clock wise as well as anticlockwise motions as and when required. Some scenarios also need the motor to be stopped in its motion. At such times our front braking and reverse braking mechanisms are used.
The instant braking in any direction occurs by applying a reverse voltage across the running motor in a small period. .the system is on microcontroller and status of the system is displayed on lcd.
VIII. HARDWARE TESTING
A. Continuity Test
In electronics, a continuity test is the checking of an electric circuit to see if current flows (that it is in fact a complete circuit). A continuity test is performed by placing a small voltage (wired in series with an LED or noise-producing component such as a piezoelectric speaker) across the chosen path. If electron flow is inhibited by broken conductors, damaged components, or excessive resistance, the circuit is "open".
Devices that can be used to perform continuity tests include multi meters which measure current and specialized continuity testers which are cheaper, more basic devices, generally with a simple light bulb that lights up when current flows.
An important application is the continuity test of a bundle of wires so as to find the two ends belonging to a particular one of these wires; there will be a negligible resistance between the "right" ends, and only between the "right" ends.
This test is the performed just after the hardware soldering and configuration has been completed. This test aims at finding any electrical open paths in the circuit after the soldering. Many a times, the electrical continuity in the circuit is lost due to improper soldering, wrong and rough handling of the PCB, improper usage of the soldering iron, component failures and presence of bugs in the circuit diagram. We use a multi meter to perform this test. We keep the multi meter in buzzer mode and connect the ground terminal of the multi meter to the ground. We connect both the terminals across the path that needs to be checked. If there is continuation then you will hear the beep sound.
B. Power On Test
This test is performed to check whether the voltage at different terminals is according to the requirement or not. We take a multi meter and put it in voltage mode. Remember that this test is performed without microcontroller. Firstly, we check the output of the transformer, whether we get the required 12 v AC voltage. Then we apply this voltage to the power supply circuit. Note that we do this test without microcontroller because if there is any excessive voltage, this may lead to damaging the controller. We check for the input to the voltage regulator i.e., are we getting an input of 12v and an output of 5v. This 5v output is given to the microcontrollers’ 40th pin. Hence we check for the voltage level at 40th pin. Similarly, we check for the other terminals for the required voltage. In this way we can assure that the voltage at all the terminals is as per the requirement
IX. ACKNOWLEDGEMENT
The satisfaction and euphoria that accompany the successful completion of any task would be incomplete without the mentioning of the people whose constant guidance and encouragement made it possible. We take pleasure in presenting before you, our project, which is result of studied blend of both research and knowledge. We express our earnest gratitude to our internal guide, Assistant Professor Ms. N.N. Shaikh, Department of Electrical Engineering, our project guide, for his constant support, encouragement and guidance. We are grateful for his cooperation and his valuable suggestions. Finally, we express our gratitude to all other members who are involved either directly or indirectly for the completion of this project.
X. FUTURE SCOPE
This proposed approach can be enhanced by using higher power electronic devices to operate high capacity DC motors. Regenerative braking for optimizing the power consumption can also be incorporated.
Conclusion
It can be studied that the four quadrants of operation of DC motor are clockwise, counter clock-wise, forward brake and reverse brake. The need of a four quadrant control system and its speed control techniques in those quadrants are explained. Our approach suggests used of microcontroller which develops required pulses. For the operation of the motor push buttons are provided. The se buttons are interfaced to the circuit providing an input signal to it; which in turn controls the DC motor through a driver IC.
References
[1] Sunita, TirupatiGupta :Speed control of Single phase Induction motor using android bluetooth.ISSN-2321-3361 International Journal of engineering Science and Computing Volume 6 Issue 5 September 2016. [2] Mr.K.Narasimhaiah :Speed Control of AC motor by using blue control app.ISSN-2393-9923 Global Journal of Trends in engineering Volume 1 Issue 2 April2016. [3] Abhishek Gupta: Induction motor speed control using android application. ISSN-2348-6988 International Journal of Electrical and Electronic Research Volume 4 Issue 2 April June 2016. [4] Mr. Sandesh Sonar , Mr. Pavankumar Karadiguddi , Mr. Shivanand Banti: Four Quadrant Operation And Control Of Three Phase BLDC Motor For Electric Vehicles. IEEE PES GTD Grand International Conference and Exposition Asia (GTD Asia).2019. [5] M. Baszynski, S. Pirog: Unipolar Modulation For A BLDC Motor With Simultaneously Switching Of Two Transistors With Closed- Loop Control For Four Quadrant Operation Volume: 14 Issue: 01,2018. IEEE Transactions on Industrial Informatics.
Copyright
Copyright © 2024 Prof. Ms. N.N. Shaikh, Atif Shaikh, Musa Shaikh, Umar Shaikh, Mhalappa Kore, Sanjay Kolhe. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61903
Publish Date : 2024-05-10
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online