

Ijraset Journal For Research in Applied Science and Engineering Technology
Gesture Controlled Robot for the Disabled using Arduino
Authors: Meghana Sara, D Sumathisree, K Dharani, R Deepika
DOI Link: https://doi.org/10.22214/ijraset.2024.61159
Certificate: View Certificate
Abstract
The gesture-controlled robot project presents a novel approach to human-robot interaction, utilizing hand gestures as an intuitive and natural means of control. This project aims to develop a system where users can seamlessly communicate with a robot using simple hand movements. The project consists of two main components: a handheld device for gesture input and a robot equipped with sensors and actuators for movement. Through wireless communication, the handheld device transmits signals encoding the user\'s hand gestures to the robot\'s receiver module, which decodes the signals, processes them, and translates them into commands for controlling the robot\'s movements. Advantages of this system include intuitive control, wireless operation, real-time interaction, enhanced safety, adaptability, educational value, and versatility. However, challenges such as gesture recognition complexity and limited gesture vocabulary must be addressed to ensure the system\'s effectiveness. The project has numerous applications, including entertainment, assistive technology, industrial automation, education, home automation, IoT, security, and interactive exhibits. By leveraging gesture-controlled robotics, this project contributes to advancing human-robot interaction technology and fostering innovation in various domains.
Introduction
I. INTRODUCTION
Recent advances in robotics and assistive tech have fueled innovative solutions for enhancing the lives of individuals with disabilities. Among these, gesture-controlled robots offer a promising path to greater accessibility and independence. This project leverages Arduino-based systems to enable intuitive interaction with robots, addressing the challenges posed by traditional input devices. By allowing users to control movements through hand gestures, the project aims to empower individuals with disabilities to navigate their environments more effectively. With a focus on tailored design and real-time gesture interpretation, the project holds potential to significantly improve quality of life and promote inclusivity in robotics and assistive technology.
II. RELATED WORK
In recent times several initiatives have been explored in the intersection of gesture control and assistive robotics to enhance accessibility for individuals with disabilities. Projects such as the Myo armband system have demonstrated the potential of wearable technology in enabling gesture-based control of robotic devices. By capturing electromyographic signals from muscle movements, the Myo armband allows users to intuitively interact with computers, virtual reality environments, and robotic prosthetics, offering a versatile platform for assistive applications.
Additionally, research efforts have focused on developing gesture recognition algorithms tailored to the unique needs of individuals with disabilities. Studies have investigated machine learning techniques for interpreting a wide range of gestures, including those with limited dexterity or mobility. By refining gesture recognition models and incorporating adaptive features, researchers aim to create robust and inclusive interfaces that cater to diverse user abilities, thereby enhancing the usability and effectiveness of gesture-controlled systems in assistive contexts.
Furthermore, collaborative initiatives between academia and industry have yielded advancements in the design and implementation of gesture-controlled robots specifically tailored to the needs of individuals with disabilities. These projects emphasize user-centered design principles and participatory approaches to ensure that robotic systems align closely with user preferences and requirements. By integrating user feedback and incorporating accessibility features, researchers strive to develop assistive robots that empower individuals with disabilities to lead more independent and fulfilling lives.
III. PROPOSED SYSTEM
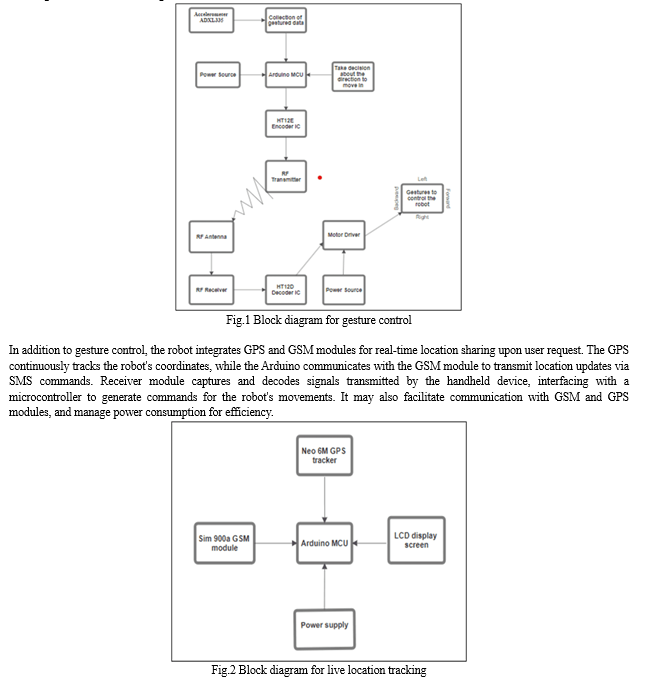
The robot enables users to control its movements through hand gestures, leveraging an accelerometer and Arduino Nano microcontroller. Accelerometer detects hand movements, with Arduino processing the data and encoding it via an H12E encoder into a serial data stream. Commands are wirelessly transmitted to the robot's receiver section using a radio transmitter module, allowing real-time execution of gestures.
Conclusion
The gesture-controlled robot project marks a breakthrough in human-robot interaction, offering intuitive control via hand gestures. Utilizing gesture recognition and wireless communication, it facilitates natural interaction across entertainment, assistive tech, and education. Despite challenges like gesture complexity, refinement promises a transformative impact on automation, paving the way for a future where gesture-controlled robotics enrich our daily experiences.
References
[1] Jesus Suarez and Robin R. Murphy, \"Hand Gesture Recognition with Depth Images: A review\", 2012 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication, September 9-13, 2012. [2] Silas Wan and Hung T. Nguyen, \"Human Computer interaction Using Hand Gesture\", 30th Annual International IEEE EMBS Conference, 2008, August 20-24, 2008. [3] K K Vyas, A. Pareek and S Vyas, \"Gesture Recognition and Control\", Part 1-Basics Literature Review & Different Techniques International Journal on Recent and Innovation Trends in Computing and Communication [4] Nitin and Naresh, Gesture Controlled Robot PPT, May 2017 [5] Umesh Yadav, Ankur Tripathi, Sonali Dubey and S. K. Dubey, \"GESTURE CONTROL ROBOT\", International Journal of Advanced Technology in Engineering and Science, vol. 02, no. 05, May 2014 [6] Wikipedia. Robot, 11 Nov 11 2018 [7] R. Mardiyanto, M. F. R. Utomo, D. Purwanto and H. Suryoatmojo, \"Development of hand gesture recognition sensor based on accelerometer and gyroscope for controlling arm of underwater remotely operated robot\" in 2017 ISITIA, Surabaya, pp. 329-333, 2017. [8] J. Wang, Y. Miao, A. Khamis, F. Karray and J. Liang, \"Adaptation Approaches in Unsupervised Learning: A Survey of the State-of-the-Art and Future Directions.\" in Image Analysis and Recognition. ICIAR 2016. Lecture Notes in Computer Science, Cham:Springer, vol. 9730, 2016. [9] Accelerometer Based Hand Gesture Controlled Robot using Arduino, November 2018 [10] Ronny Mardiyanto, Mochamad Fajar Rinaldi Utomo, Djoko Purwanto and Heri Suryoatmojo, Development of hand gesture recognition sensor based on accelerometer and gyroscope for controlling arm of underwater remotely operated robot, 2017
Copyright
Copyright © 2024 Meghana Sara, D Sumathisree, K Dharani, R Deepika. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61159
Publish Date : 2024-04-28
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online