

Ijraset Journal For Research in Applied Science and Engineering Technology
Gestures Controlled Robot
Authors: Shailaja Kadam, Vaishnavi jadhav , Rajashree Takur, Srushti Nakate, Dipti Chavan
DOI Link: https://doi.org/10.22214/ijraset.2024.58807
Certificate: View Certificate
Abstract
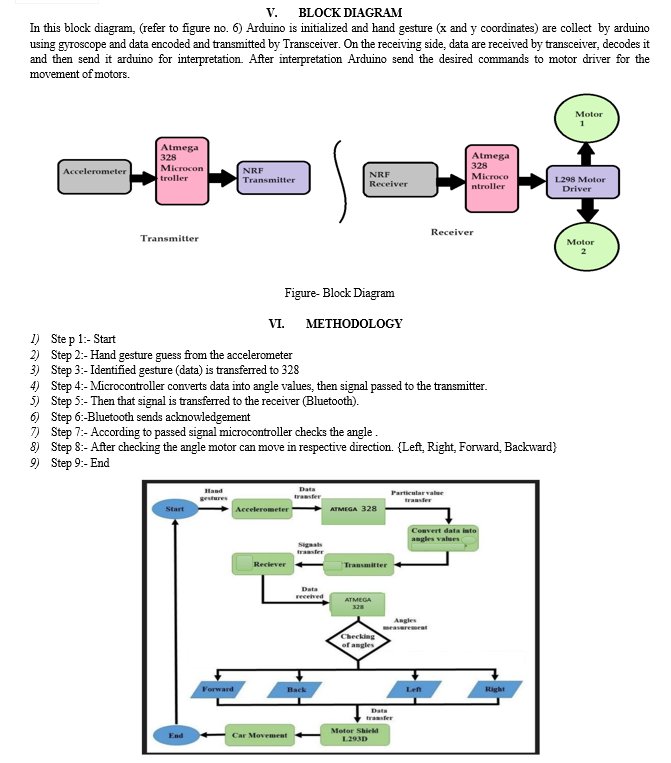
The main abstract of the project work is to control robot with gestures using hand. There are two main components of the system: The accelerometer depends upon the gestures of the hand. Through accelerometer, a passage of data signal is received and it is processed with the help of Atmega328 microcontroller. The microcontroller gives command to the robot to move in the desired direction. The basic working principle for the robot is passage of the data signals of accelerometer readings to the Arduino board fitted on the bot. The program compiled in that Atmega328 runs according to that value, which make the bot function accordingly. While we have used three-axis accelerometer. In which, one axis will control the speed in forward or backward direction and other axis will control the turning mechanism. Accelerometer-based gesture control is studied as a supplementary or an alternative interaction modality. Gesture commands freely trainable by the user can be used for controlling external devices with handheld wireless sensor unit.
Introduction
I. INTRODUCTION
The gesture-controlled robot utilizes a hand-mounted glove with a transmission circuit assembly comprising an accelerometer, microcontroller, and RF transmitter. This assembly serves as the input device, enabling users to control the robot's movements with intuitive hand gestures. The accelerometer data is transmitted to the microcontroller onboard the bot, where it is processed to execute corresponding commands. By interpreting specific gestures as commands, users can effortlessly navigate the robot, showcasing the potential for hands-free control in various applications such as surveillance, exploration, and entertainment. This project not only exemplifies the convergence of robotics and human-computer interaction but also aims to streamline user experience by providing a natural and intuitive interface for remote control, potentially rendering conventional input devices redundant. Through the seamless integration of sensors and algorithms, the gesture-controlled robot represents a significant advancement in HMI technology, offering users a novel and immersive way to interact with machines.
II. RELATED WORKS
Sndeept and Supriya [1] proposed a gesture-controlled wheelchair system, acknowledging the global need for mobility aids, especially among the paralyzed population. Utilizing hand tilting and processing technology, their approach offers intuitive mobility, addressing challenges faced by joystick models.
Similarly, D. R. K. Purshotam Prasad [7] introduced a wheelchair control system using hand gestures and Acceleration technology. By integrating Flex and Acceleration sensors and Arduino-based devices, it provides intuitive directional control, particularly benefiting paralyzed individuals. These innovations represent significant strides in enhancing accessibility and independence for the physically disabled.
III. LITERATURE SURVEY
A. Existing System
The Existing System which the project using in that robot is having the same transmitter and the receiver section but the only difference is that it require controller to control the robot. In that case the Robot can only be controlled using the buttons or joypad.
B. Issues in Existing System
Today in this world where the Technology and Science is growing day by day the field of Robotics also needed to be upgraded. Thus it was found that there are a few issues in the existing system As the existing system can be controlled only with the Controller so the user cannot directly control the robot. Secondly the physical work is more to control the robot. Thirdly the power consumption was more as the controller requires power supply to a higher extent than the Accelerometer. Finally the expense was more as more hardware was required. These were a few Drawbacks in the existing System


VIII. FUTURE SCOPE
- In the future, we will directly use a mobile phone with an accelerometer to control a car-robot. We also want to add more hand gestures (such as the curve and slash) into the interface to control the car more naturally and effectively.
- On road driving need multi-dimensional parameter estimation to avoid risks.
- The GSM can be embedded in to the present work to extend its feature such as sending messages during emergency
Conclusion
In this Project, A robotic car is designed which is controlled by hand gesture using microcontroller. The transmission of data is done with nRF241L0pa which is found to be very efficient as compared to other wireless modules. This project can be beneficial where the humans are not able to perform any task but can be defined or the task with some device using hand gestures.
References
[1] Sndeept and supriya, \"Wheel-Chair Control Using Accelerometer Based Gesture Technology\", International Journal of Advance Research in Computer Engineering and Technology (IJARCET) Volume 4 Issuse 5, May 2015. [2] Y. Chen, \"Application of Tilt Sensors in Human- Computer Mouse Interface for People with Disabilities\", in IEEE Transactions Neural Systems and Rehabilitation Engineering, Vol. 9, No. 3, September 2001, pp. 289-295 [3] V. Rajesh et al., \"SEMG based human-machine interface for controlling a wheelchair by using ANN\", proceedings of Control Automation Communication and Energy Conservation 2009. INCACEC 2009.2009 International Conference. [4] Rajesh KannanMegalingam, Ramesh Nammily Nair, -Automated Voice based Home Navigation System for the Elderly and the Physically Challenged Feb. 13~16, 2011 [5] Rajesh KannanMegalingam et al., \"Wireless gesture controlled wheelchair\", 2017 4th International Conference on Advanced Computing and Communication Systems (ICACCS), 24 August 2017, Coimbatore, India [6] Prof.Chittep.p et al., \"A hand gesture based wheelchair for physically handicapped person with emergency alert system\", International Research Journal of Engineering and Technology (IRJET), Volume: 03 Issue: 04, Apr-2016 [7] D.R.K.Purshotham Prasad et al, “Wireless gesture controlled robot car using Arduino Microcontroller” , in JETIR Feb 2021 , Vol 8,Issue 2,Andra Pradesh , India
Copyright
Copyright © 2024 Shailaja Kadam, Vaishnavi jadhav , Rajashree Takur, Srushti Nakate, Dipti Chavan. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET58807
Publish Date : 2024-03-06
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online