

Ijraset Journal For Research in Applied Science and Engineering Technology
Haptic Glove for Post-Stroke Rehabilitaion
Authors: Shantanu Khopade, Aditya Jilla, Khadyot Takale
DOI Link: https://doi.org/10.22214/ijraset.2024.61640
Certificate: View Certificate
Abstract
The rehabilitation process for post-stroke patients often involves expensive haptic gloves, limiting accessibility to effective therapeutic tools. Additionally, existing market offerings are characterized by their bulkiness, impeding user comfort and freedom of movement during rehabilitation exercises. This paper will explain the development of our project which aims to develop an affordable and ergonomically designed haptic glove for post-stroke hand rehabilitation, utilizing flex sensors, vibration motors, and Arduino technology. This project not only addresses the financial constraints associated with rehabilitation technology but also aims to revolutionize the user experience by creating a compact, user-friendly, and affordable haptic glove, ultimately facilitating more accessible and effective post-stroke hand rehabilitation.
Introduction
I. INTRODUCTION
Stroke survivors often face debilitating upper limb motor impairments, significantly impacting their quality of life [1]. Effective rehabilitation is essential for their recovery [2]. Haptic technology, utilizing tactile and kinesthetic feedback, shows promise in enhancing stroke rehabilitation. This paper introduces an innovative haptic glove designed for post-stroke rehabilitation, focusing on improving hand functionality and motor control. Our interdisciplinary approach draws from engineering, neuroscience, and rehabilitation medicine. The haptic glove integrates vibro-tactile actuators, hand-tracking sensors, microcontrollers, and power sources to optimize its effectiveness. Through controlled experiments and clinical trials, we evaluate the glove's efficacy in enhancing hand function, range of motion, and grip strength in post-stroke individuals. This research contributes to the field of haptic technology in healthcare and rehabilitation, offering potential for improved stroke recovery [3].
II. EXISTING SYSTEM
A. Feedback Types
- Tactile Feedback: Tactile feedback devices are designed to provide sensory input to the user's skin. They aim to recreate sensations such as the shape, texture, or even the thermal properties of virtual objects. This type of feedback helps users feel as if they are touching and interacting with virtual objects.
- Kinesthetic Feedback: Kinesthetic feedback devices, on the other hand, apply forces directly to the user's skeleton and muscles. These forces create an impression of movement and resistance. In essence, kinesthetic feedback makes users feel as though they are experiencing physical forces and motions in the virtual environment. In real-life interactions, both tactile and kinesthetic feedback types are naturally present when we touch objects.
B. User Requirements
Haptic gloves must meet specific user requirements to be effective. The glove should ideally provide both tactile and kinesthetic feedback to create a holistic sense of touch and interaction. Haptic gloves should be wearable comfortably without being excessively heavy. They should not impede the natural movement of the fingers, allowing users to interact with the virtual environment as naturally as possible.
C. Types of Haptic Gloves
- Traditional Gloves: These gloves are typically made of flexible fabric that conforms to the shape of the user's hand, allowing individual finger movement. Sensors to measure finger flexion and actuators for providing feedback are either embedded within the fabric or attached to the outside of the gloves. Challenges in designing traditional haptic gloves include the need for small sensors and actuators that can fit within the fabric, ensuring flexibility for natural movement, and ensuring the glove can withstand deformations without sustaining damage.
- Thimbles: Thimbles are a configuration where actuators are attached directly to the fingertips. Multiple thimbles can be combined to provide feedback on several fingers simultaneously. Designing effective thimbles is challenging due to the need to integrate sensors, actuators, power sources, and wireless communication within a very compact and lightweight device. It's important that thimbles can accommodate fingers of varying sizes without causing discomfort or slipping.
D. Examples of Existing Haptic Gloves
- Gloveone and AvatarVR by Neurodigital Technologies: These gloves offer interaction with all five fingers and utilize vibrotactile actuators. The actuator placement includes one under each fingertip, three under the palm, and two on the back of the hand. The exact type of actuators used is not always clear. Hand pose is typically measured by an IMU (Inertial Measurement Unit). For example, the Gloveone uses flex sensors to measure finger positions, while the AvatarVR uses IMUs for each finger.
- Senso Glove by Senso: This glove is designed in the USA and provides interaction with all five fingers. It features one vibration motor located under the last phalange of each finger. The measurement of finger and hand movements is based on inertial sensors, which makes the device cost-effective and easy to calibrate, but it may sacrifice some precision. It comes in different sizes to accommodate various hand sizes. [4-5]
E. Limitations
One significant limitation in designing haptic gloves is the need to produce them in large quantities to achieve an acceptable market price. This presents a challenge because gloves must either fit a wide range of hand sizes and forms or be easily adaptable to individual users.
When actuators need to be placed precisely relative to the user's anatomy, achieving both mass production and adaptability becomes a complex task. Existing haptic gloves often face limitations, including restrictions on natural hand motion, bulkiness, or heaviness. They may not fully meet the criteria of being user-friendly and effective simultaneously. [4-5]
III. LITERATURE REVIEW
The research has been done on designing a wearable soft robotic haptic feedback glove for force feedback in virtual environments. The glove provides force feedback to the fingers while clicking a button in virtual environments. The glove design includes a soft exoskeleton actuated by McKibben fluidic muscle actuators. The user’s fingers are tracked using the infrared cameras. This tracking system provides the information for the position of the user’s fingers. Based on this information, the soft glove is actuated to provide haptic feedback.[6]
Discussion has been done on the history surrounding the development of haptic feedback systems. Earlier, manipulators and telerobots, used in the nuclear and subsea industries, were used for this purpose.
While nowadays, desktop devices, used to support real-time interaction with 3D visual simulations, or Virtual Reality are being widely used. Four examples of recent VR projects are described, illustrating the use of haptic feedback in ceramics, aerospace, surgical and defense applications.[7]
Concept of a soft robotic glove that provides haptic feedback to the surgeon's hand during interventional endoscopy procedures, specifically colonoscopy. The glove is connected to a force-sensing soft robotic sleeve that is mounted onto a colonoscope. The glove consists of pneumatic actuators that inflate in proportion to the incident forces on the soft robotic sleeve. Thus, the glove can alert the surgeon of potentially dangers to the colon by the colonoscope during the navigation.[8]
IV. METHODOLOGY/EXPERIMENTAL
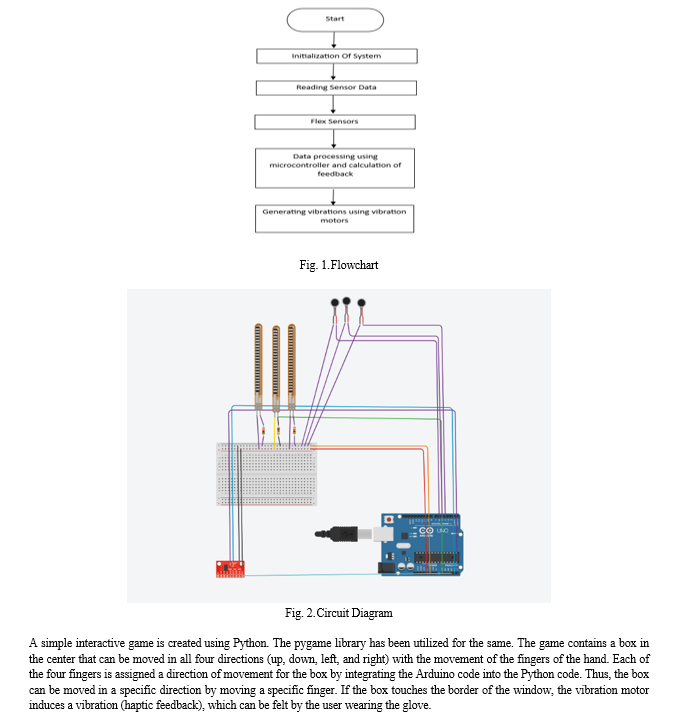
For tracking the position of the fingers, we are using conductive-based flex sensors. Four flex sensors have been attached to each finger of a hand glove excluding the thumb.
Flex sensors contain a special type of conductive ink that is protected by a very thin substrate. As this substrate is bent, an output resistance is produced, which is associated with the bend radius. With the help of this, the bend in each finger of the hand can be calculated. A haptic vibration motor is also attached to the glove. The sensors and the motor are connected to an Arduino UNO microcontroller board.

Conclusion
The use of flex sensors facilitates tracking the movement of the fingers. The implementation of the game provides an immersive and interactive interface for the user. The haptic feedback provided is from the vibration motor. This system aids the rehabilitation process and improves the recovery rate of stroke-affected patients. The components used to develop the prototype are relatively inexpensive, thus making it very cost-effective compared to other existing solutions.
References
[1] Nichols-Larsen, D. S., Clark, P. C., Zeringue, A., Greenspan, A., & Blanton, S. (2005). Factors influencing stroke survivors’ quality of life during subacute recovery. Stroke, 36(7), 1480-1484. [2] Pollock, A., Baer, G., Pomeroy, V., & Langhorne, P. (2007). Physiotherapy treatment approaches for the recovery of postural control and lower limb function following stroke. The Cochrane Library. [3] Saposnik, G., Levin, M., & Outcome Research Canada (SORCan) Working Group. (2011). Virtual reality in stroke rehabilitation: A meta-analysis and implications for clinicians. Stroke, 42(5), 1380-1386. [4] Ma, Z., & Ben-Tzvi, P. (2015). Design and optimization of a five-finger haptic glove mechanism. Journal of Mechanisms and Robotics, 7(4), 041008. [5] Helin, K., Poyade, M., D\'Cruz, M., & Eastgate, R. (2018). The Industrial Track of EuroVR 2018: Proceedings of the 15th Annual EuroVR Conference. In European Association for Virtual Reality and Augmented Reality Conference, EuroVR 2018. VTT Technical Research Centre of Finland. [6] Jadhav, Saurabh, Vikas Kannanda, Bocheng Kang, Michael T. Tolley, and Jurgen P. Schulze. \"Soft robotic glove for kinesthetic haptic feedback in virtual reality environments.\" Electronic Imaging 2017, no. 3 (2017): 19-24. [1] [7] Stone, Robert John. “Haptic Feedback: A Brief History from Telepresence to Virtual Reality.” Haptic Human-Computer Interaction (2000).[2] [8] Gerald, Arincheyan, Rukaiya Batliwala, Jonathan Ye, Patra Hsu, Hiroyuki Aihara and Sheila Russo. “A Soft Robotic Haptic Feedback Glove for Colonoscopy Procedures.” 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2022): 583-590. [3]
Copyright
Copyright © 2024 Shantanu Khopade, Aditya Jilla, Khadyot Takale. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61640
Publish Date : 2024-05-05
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online