

Ijraset Journal For Research in Applied Science and Engineering Technology
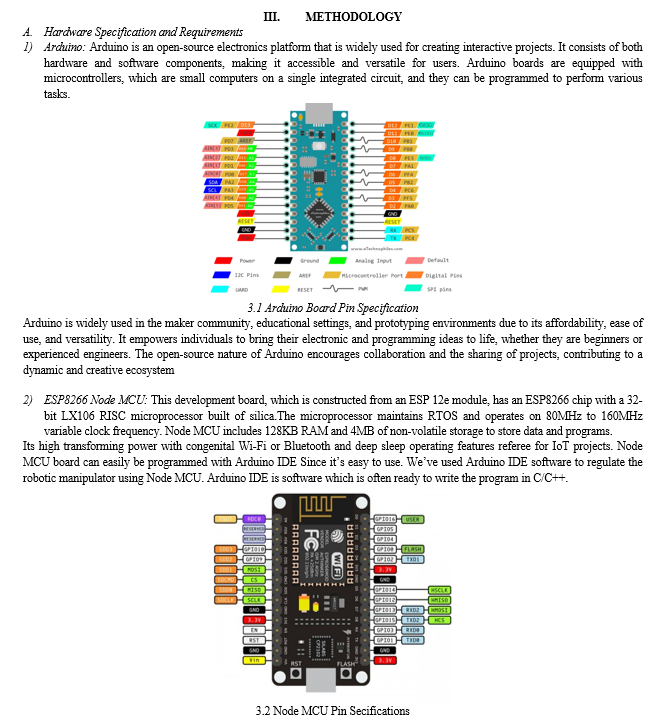
Helping Hands for Handicaps
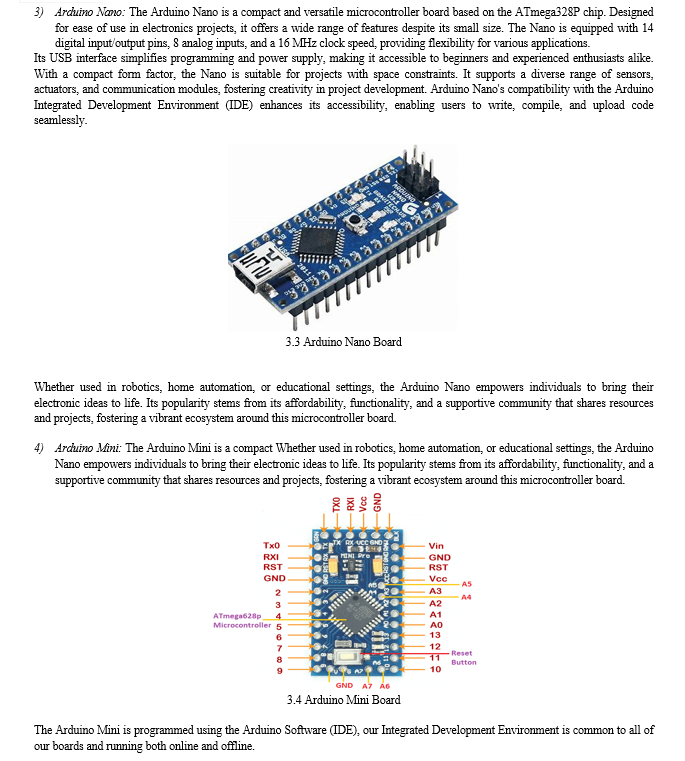
Authors: Deepika Bairagi, Bhupendra Nirmalkar, Manoj Kumar Sahu, Mohnish Jamde, Rishita Negi, Uday Upadhyay
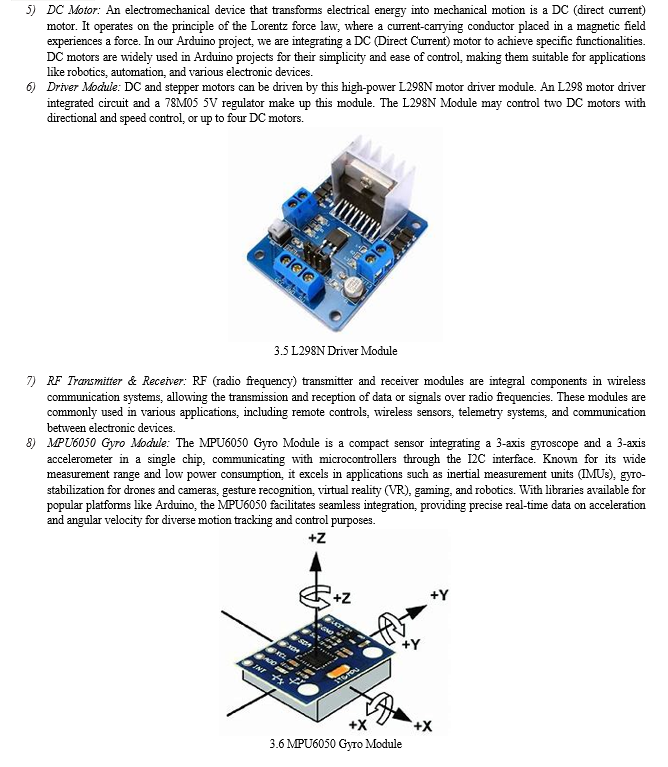
DOI Link: https://doi.org/10.22214/ijraset.2024.61654
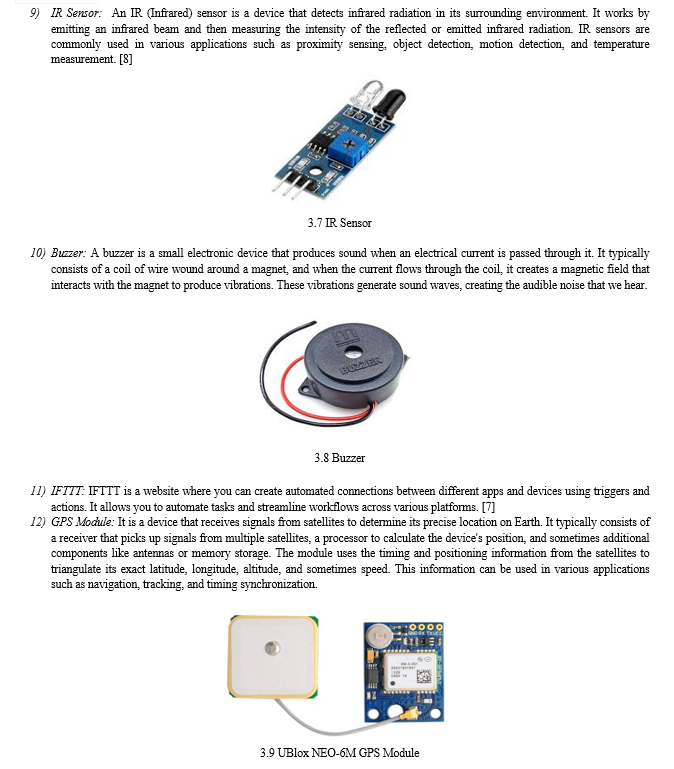
Certificate: View Certificate
Abstract
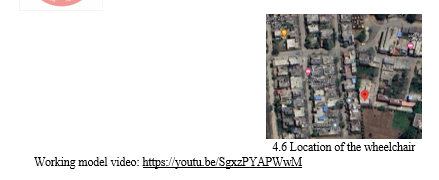
We have more advanced wheelchairs in today\\\'s generation. it includes joystick wheelchair, head motion control wheelchair, gesture control wheelchair etc. But with the advance technology it is expensive too, which is not affordable for most of the middle-class families. In order to provide an advanced wheelchair in an affordable price, we have to use less components to reduce the cost so that a person can buy it with a price less than the today’s basic bikes price. To achieve this, we used some basic electronic components such as Arduino MINI and NANO, gyro sensor, Node MCU, Motors etc. To get extra security we integrated some calling and GPS location features too. The person sitting in the wheelchair can control the wheelchair through hand gestures. Additionally, whenever the person sitting in the wheelchair faces any problem, such as if the wheelchair falls, the caretaker will receive a notification and through the GPS location, the caretaker will be able to reach their location.
Introduction
I. INTRODUCTION
We titled our model as “Helping Hands for Handicaps”. It is a hand gesture-controlled wheelchair that represents a groundbreaking endeavor at the intersection of assistive technology and human-computer interaction, seeking to revolutionize the mobility experience for individuals with physical disabilities. In a world where traditional wheelchair controls often present challenges for those with limited motor functions, this project endeavors to provide a more inclusive and intuitive solution. Leveraging advancements in hand gesture recognition technology, the system aims to decode and interpret a predefined set of gestures, allowing users to navigate their wheelchair with simple, natural hand movements. The underlying motivation for this innovation lies in the pursuit of enhancing the quality of life for individuals facing mobility impairments, promoting autonomy, and reducing reliance on complex control interfaces or assistance from caregivers. At its core, the project focuses on four key objectives. Firstly, it aims to develop a robust hand gesture recognition system capable of accurately and efficiently interpreting a range of gestures. The second objective is that requiring a seamless interface that allows for real-time and responsive control based on the recognized gestures. The third objective emphasizes the importance of user friendliness, as the system must cater to individuals with varying degrees of technological familiarity. The final objective involves rigorous testing and optimization, wherein the system's accuracy, responsiveness, and overall performance are assessed. User feedback and testing results inform iterative improvements, refining the technology to meet the specific needs of its intended users.
II. LITERATURE SURVEY
When an unfortunate event like leg problems affect the person, it is necessary to use devices like wheelchairs that offer a means of displacement for patients with problems. Tremendous modification has been made in the field of wheelchair technology. However, significant advances haven’t been able to help quadriplegics navigate wheelchair unassisted. Some patients those who cannot operate the wheelchair with their arms due to a lack of force or psychomotor problems in the superior members, request electric wheelchairs, frequently manipulated with joysticks or gesture-controlled wheelchairs. In this paper, we demonstrate our project ideas. Our project involves using a gyro sensor, Arduino Nano, RF transmitter, RF receiver, L298N motor driver, motors, IR sensor, Node MCU (ESP8266), buzzer, and connecting wires.
- Hand Gesture Controlled Wheelchair
Author: Reshma Anilkumar, Amal M R
Published in: IJCRT 2023
The persons with disabilities are always facing barriers in accessing the basic services, these barriers can be effectively addressed through advanced technologies.
To overcome that a wheelchair is developed that will be beneficial to mankind, here an accelerometer sensor is used, which gives the analog signal according to the tilt of the accelerometer in x and y direction and RF module is used to transmit the signal from the transmitter section to receiver section then the movement of the wheel is controlled.[1]
2. Head Motion Controlled Wheelchair
Author: Farah Binte Haque, Tahwid Hossain Shuvo, R khan
Published in: IEEE conference 2021
Head motion-controlled wheelchair is an intelligent wheelchair with facilities for navigating, recognizing obstacles, and moving automatically by managing detectors and motions. In this wheelchair performs head motion through a microcontroller and wheelchair performs head motion through a microcontroller. The controller filters the indication and allows the action of the wheelchair for its navigation. The ultrasound detector helps to resist impediments. DC motors will drive the wheelchair during the gesture of control mode. The motors will not work, and consequently, the wheelchair will not run when the head is neutral. [2]
3. Joystick Controlled Wheelchair
Author: Trinayan Saharia, Jyotika Bauri, Mrs Chayanika Bhagabati
Published in: IRJET 2017
A joystick control wheelchair is very important for the physically challenged people. They cannot move anywhere like a normal person. For this reason, they always depend on the other people. But the joystick control wheelchair can remove this problem and help them to move anywhere. The movement of wheelchair can be control manually by the joystick. The command is implemented by using joystick and then the command is sent to the Arduino board where the controller ATMega328p will process the command. After processing the controller send the command in the form of digital signal to the motor driving IC and the motor driving IC control the movement of wheelchair. [3]
4. Mind Controlled Wheelchair
Author: Utkarsh Sinha, M Kanthi
Published in: IOSR-JEEE 2016
The study focuses on building an electric wheelchair out of a standard wheelchair and creating a Brain-Computer Interface (BCI) system that connects the electric wheelchair to the human brain. The ARM microcontroller FRDM KL-25Z, a Freescale board, processes the signal from the EEG sensor. Based on floor detection and obstacle avoidance sensors installed on the wheelchair's footplate, the microcontroller decides which way to move the wheelchair. On a color LCD that is interfaced to the MCU, real-time information is shown. [4]
5. Accelerometer Based Hand Gesture Controlled Wheelchair
Author: Abirami, Anupriya, Nagaraju
Published in: IJTRA 2016
People who are unable to walk owing to physical or physiological illnesses, injuries, or disabilities use wheelchairs. Recent advancements indicate that there is much room for progress in smart wheelchairs. This article describes a gesture-based wheelchair that is operated by hand gestures. The wheelchair control and the memory sensor are the two primary components of the system. The Mems sensor, which is connected to hand, is a 3-axis accelerometer with digital output (I2C) that provides hand gesture detection, converts it into the 6-bit digital values and gives it to the PIC controller. The wheelchair control unit is a wireless unit that is developed using another controller. [5]
6. Hand Gesture Wheel Chair Using Raspberry Pi And Open CV
Author: Konduru Sujana, N Gunasekhar Reddy
Published in: INSETR 2016
It's possible to capture gestures from any body movement or state but common way is to capture from face or hand. In the proposed system they mainly concentrate on Hand gesture recognition. This Novel system completely depends on the Python OpenCV software and Arm11 controller. By using USB Web Camera and DC motor they control the movement of the wheelchair.
This Proposed system not only captures hand movement, but also control the wheelchair depending on the hand movement i.e. wheelchair will move according to the number of fingers. By recognizing the number of fingers wheelchair will move in all four directions. [6]
Conclusion
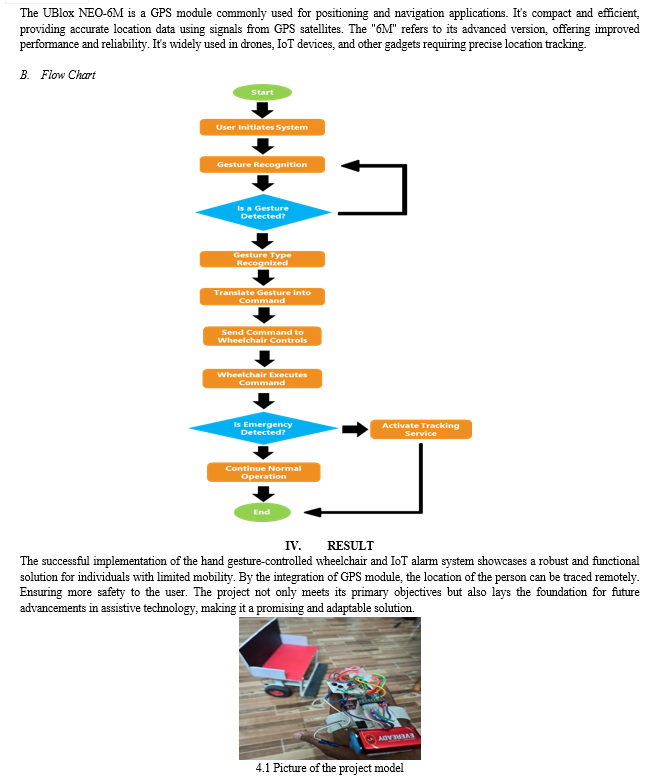
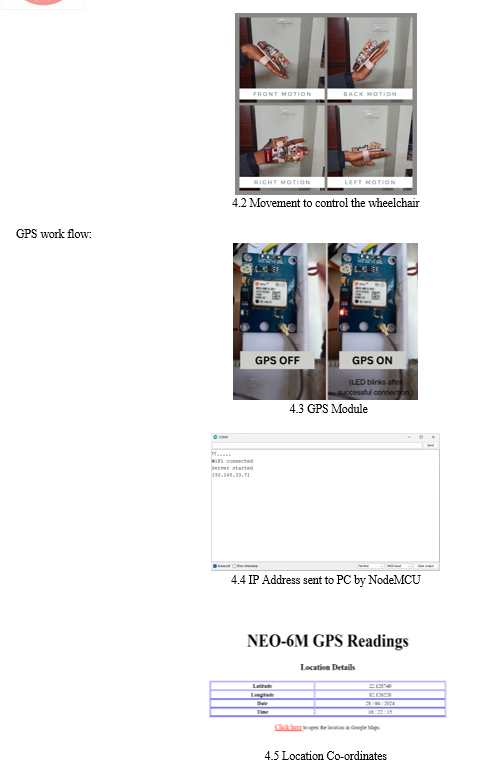
The integration of gyro sensors, RF transmission, Arduino controllers, motor drivers, IR sensors, Node MCU, GPS module and IOT technologies leads to an innovative assistive system. The hand gesture-controlled wheelchair provides a user-friendly interface for precise navigation which showcases the practical application of advanced sensor technology. Additionally, the alarm system enhances safety by measuring fall distances and activating alarms based on conditions. This project is an example of the transformative potential of innovative solutions, promoting freedom and well-being for individuals with mobility challenges. After establishing the location system, the final conclusion is that this system not only aids in navigation but also provides an additional layer of safety for the user. It represents a significant step towards improving the lives of individuals with mobility challenges through advanced technology and innovation.
References
[1] Reshma Anilkumar, Amal M R, Hand Gesture Controlled Wheelchair, IJCRT, volume 11, issue 11 January 2023, IJCRT2301569 [2] Farah Binte Haque, Tahwid Hossain Shuvo, R khan, Head Motion Controlled Wheelchair, IEEE 2021 [3] Trinayan Saharia, Jyotika Bauri, Mrs Chayanika Bhagabati, Joystick Controlled Wheelchair, IRJET, volume 4 issue 7, July 2017 [4] Utkarsh Sinha, M Kanthi, IOSR, Mind Controlled Wheelchair, volume 2 issue 3 vet III, May - June 2017, 10.9790/1676-1203030913 [5] Abirami, Anupriya, Nagaraju, IJTRA, Accelerometer Based Hand Gesture Controlled Wheelchair, volume 4 issue 4, July - august 2016 [6] Konduru Sujana, N Gunasekhar Reddy, Hand Gesture Wheel Chair Using Raspberry Pi and Open CV, INSETR, volume 5 and issue 29, September 2016 [7] IFTTT Applet automation for emergency alert system. From: https://ifttt.com/explore/applets [8] Study of different sensor type used in the project. https://www.fierceelectronics.com/
Copyright
Copyright © 2024 Deepika Bairagi, Bhupendra Nirmalkar, Manoj Kumar Sahu, Mohnish Jamde, Rishita Negi, Uday Upadhyay. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET61654
Publish Date : 2024-05-06
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online