

Ijraset Journal For Research in Applied Science and Engineering Technology
Identification of Safe Navigation Routes on the South Pole of the Moon using Chandrayaan Images
Authors: Arjit Bhardwaj, Abbas Hozefa, Arsh Gupta, Ayush Singh, Dr. D. R. Ramesh Babu
DOI Link: https://doi.org/10.22214/ijraset.2025.66640
Certificate: View Certificate
Abstract
The Moon’s south pole offers extraordinary scientific opportunities, including studying permanently shadowed craters that may contain water ice and areas of constant sunlight ideal for solar power. However, its extreme terrain presents significant challenges for rover missions, requiring detailed navigation planning. This project focuses on designing a safe and efficient navigation route for a lunar rover using high-resolution data from the Chandrayaan-2 mission. Starting at a landing site at coordinates 85.28° S, 31.20° E, the planned path will span at least 100 meters, avoiding obstacles like steep slopes and boulders while incorporating scientifically valuable stops, such as shadowed craters and sunlit regions. Advanced terrain analysis, including assessments of elevation, slope gradients, and surface conditions, will ensure the rover’s safety. Simulations will validate the proposed route under various scenarios, optimizing it for successful navigation and mission objectives. By integrating meticulous planning with advanced data analysis, this project aims to enable effective exploration of the Moon’s south pole, unlocking its scientific potential and paving the way for future lunar missions.
Introduction
I. INTRODUCTION
The exploration of the lunar south pole has garnered significant interest in recent years due to its scientific and strategic importance. The region is believed to harbor water ice deposits in permanently shadowed craters, offering potential resources for future lunar missions. However, navigating this rugged terrain presents unique challenges, including the presence of craters, uneven surfaces, and limited sunlight, necessitating the development of efficient and safe navigation strategies.
This paper focuses on the determination of crater-free paths on the lunar south pole, utilizing high-resolution Chandrayaan mission images. These images provide critical insights into the surface morphology, enabling a detailed analysis of potential hazards.The proposed approach adopts an AI-driven methodology, leveraging object detection to detect craters and interpolation to identify safe routes for navigation.
The study emphasizes the use of deep learning frameworks to detect craters. A step-by-step workflow, involving preprocessing, feature extraction, and path planning, is employed to ensure accurate and reliable results. This systematic approach not only enhances our understanding of the lunar surface but also contributes to the broader goals of autonomous rover navigation and mission planning.
By addressing the challenges of safe navigation, this research aligns with ongoing efforts to establish a sustainable human presence on the Moon. The findings are expected to assist in the design of future exploratory missions and improve the safety and efficiency of lunar operations.
II. SIGNIFICANCE OF THE SYSTEM
The paper primarily focuses on how deep learning frameworks in computer vision can be applied to enhance the safety and efficiency of lunar rover navigation. The study explores the use of deep learning models for crater detection, pathfinding algorithms for route optimization, and the integration of topographic and optical datasets for real-time navigation in lunar exploration missions. The literature survey is presented in Section III, the methodology for the proposed solution is detailed in Section IV, Section V covers the experimental results and system design, and Section VI discusses future research directions and concludes the study.
III. LITERATURE SURVEY
The study of lunar craters is fundamental for understanding the Moon’s geological history, aiding navigation systems, and identifying potential locations for future lunar bases.
A detailed review of 22 studies has been conducted, encompassing crater detection algorithms, topographical mapping, navigation systems, and communication architectures. This section highlights significant advancements in these domains.
A. Crater Detection Techniques
Crater detection remains a critical focus of lunar research. Traditional methods often struggle with variations in crater shapes and sizes. Mimansa Sinha et al. (2024) proposed a U-Net model with ResNet18 as the backbone for detecting craters using Chandrayaan-2 TMC-2 images. Their model achieved an accuracy of 86.91% on annotated data, highlighting the importance of combining advanced deep learning techniques with high-quality datasets. Similarly, Sudong Zang et al. (2021) introduced the Crater R-CNN with Two-Teachers Self-Training Noise (TTSN) to address the challenge of limited labeled data, achieving precision rates above 91%. These works emphasize the shift towards semi-supervised and deep learning-based methods for crater identification.
Automated crater detection using traditional algorithms also demonstrates notable progress. Sawabe et al. (2021) presented enhancements to their previous fuzzy Hough transform-based algorithm, achieving 80% improved crater detection accuracy. Meanwhile, Ebrahim Emami et al. (2021) explored multiscale hypothesis generation and convolutional neural networks for hypothesis verification, providing a comprehensive evaluation of different detection approaches.
B. Advanced Models and Architectures
Modern advancements incorporate attention mechanisms and feature fusion for enhanced performance. Yutong Jia et al. (2021) introduced Split-Attention Networks with Self-Calibrated Convolutions, achieving superior accuracy and transferability across planetary surfaces, including Mars and Mercury. Lili Fan et al. (2022) focused on efficiency with the ELCD model, leveraging attention mechanisms and multiscale feature fusion for high-speed detection. These models underscore the role of attention mechanisms in improving both accuracy and efficiency in crater detection.
C. Path Planning and Navigation
Efficient navigation on the lunar surface is vital for exploration missions. Zhonghua Hong et al. (2021) proposed an optimized A-Star algorithm for long-distance off-road path planning using terrain data maps, achieving a speedup of up to 550 times compared to the traditional algorithm. Xiaoqiang Yu et al. (2021) integrated deep reinforcement learning with safety constraints for lunar rover path planning, demonstrating robust performance on diverse terrains through curriculum learning and Gazebo simulations.
D. Illumination and Terrain Analysis
Exploration of the lunar south pole requires a detailed understanding of its complex illumination conditions. Yifan Zhang et al. (2023) developed a multi-temporal high-resolution image database to analyze solar angles and support Chang’E-7 mission planning. Similarly, T. M. Powell et al. (2023) utilized the Diviner Lunar Radiometer Experiment to map nighttime temperatures and rock abundances, addressing challenges in rugged terrains through topographic removal techniques.
E. Lunar Lava Tubes and Crater Catalogs
Ke Zhu et al. (2023) identified a potential lava tube in the Marius Hills region using GRAIL gravity gradients, providing insights into stable shelters for future lunar bases. Rebecca R. Ghent et al. (2024) compiled a catalog of 571 young craters using data from LRO and Kaguya/Selene, revealing spatial distributions and geological patterns that deviate from traditional models.
F. Conclusion
The reviewed studies demonstrate significant advancements in automated crater detection, navigation systems, and lunar surface analysis. The integration of deep learning, attention mechanisms, and efficient algorithms marks a paradigm shift in lunar research. These methodologies not only improve accuracy and efficiency but also provide robust solutions for upcoming lunar exploration missions.
IV. METHODOLOGY
- The methodology outlines an innovative approach designed to tackle the challenges of planning safe and efficient navigation for lunar exploration missions, particularly in the Moon’s South Pole region. The proposed solution combines deep learning models, algorithmic pathfinding, and advanced terrain analysis to ensure precise, adaptable, and scientifically valuable route planning for lunar rovers.
- The foundation of this approach is the Roboflow Lunar Crater Dataset, which comprises 3,556 high-resolution images annotated to capture crater locations, sizes, and shapes. The dataset includes a total of 7,048 labeled craters, ensuring a diverse and comprehensive representation of lunar surface challenges under varying terrain types and illumination conditions. Each image is standardized to a resolution of 416×416 pixels and provides detailed annotations, including bounding boxes and precise crater coordinates, to facilitate model training and evaluation. The dataset was divided into three subsets: a training set of 2,310 images (65%), a testing set of 890 images (25%), and a validation set of 356 images (10%). This structured division ensured robust model evaluation and helped prevent overfitting during training.
- Preprocessing of the dataset involved normalization of pixel values to maintain uniformity across images. Data augmentation techniques, such as rotations, flips, and lighting adjustments, were applied to enhance the model’s robustness against variable lighting conditions commonly encountered on the lunar surface. The dataset was prepared for training and testing, ensuring the model's ability to generalize to unseen data.
- Crater detection was achieved through a two-step approach, beginning with image segmentation of the images captured during the Chandrayaan-2 mission, to isolate regions of interest and followed by deep learning-based classification using YOLOv8. This model was selected for its exceptional real-time detection capabilities and high precision in identifying craters within complex lunar terrains. Detected crater locations were then mapped into grid-based coordinates to integrate with the A* algorithm for pathfinding.
- The A* algorithm was employed to compute the shortest and safest path, dynamically avoiding hazards and incorporating terrain gradients to ensure navigability. Additionally, scientifically significant regions, such as mineral-rich or geologically valuable sites, were integrated into the planned routes. To enhance path feasibility and efficiency, interpolation techniques were applied to generate smooth navigation paths with evenly spaced waypoints. These refined paths minimized energy consumption, reduced mechanical stress on the rover, and enhanced scientific exploration outcomes.
- The solution culminated in the generation of annotated maps and 3D visualizations of planned navigation routes. These outputs included detailed crater annotations, hazard levels, and optimized paths, providing actionable insights for lunar exploration missions.
The overall workflow included preprocessing the Roboflow Lunar Crater Dataset, crater detection using YOLOv8, pathfinding with the A* algorithm, and path refinement via interpolation. The methodology's robust framework minimizes manual intervention, enhances rover safety, and ensures scientifically optimized navigation paths for future lunar exploration missions.
A. System Design
The Lunar Crater Navigation System is a modular architecture designed to autonomously navigate lunar terrain by detecting craters and generating safe paths for rover movement. It is organized into two primary modules: the Lunar Crater Navigation System and the Navigation and UI module. Each module is responsible for specific tasks, ensuring accurate crater detection, efficient pathfinding, and seamless user interaction through a comprehensive and scalable design.
B. Lunar Crater Navigation System
The Lunar Crater Navigation System forms the core of the architecture, responsible for processing terrain data, identifying craters, and generating safe and optimal navigation paths for the rover.
C. Crater Detection
The system begins with the Crater Detection component, which employs advanced object detection algorithms, particularly YOLOv8, to identify craters in the lunar terrain. YOLOv8’s real-time detection capabilities enable precise localization of craters, capturing details such as size, shape, and position. This component processes input from high-resolution terrain images and outputs a list of detected craters with their corresponding spatial coordinates and dimensions.
D. Coordinate Transformation
Following detection, the Coordinate Transformation component converts the crater data into a coordinate system compatible with the rover’s navigation system. This transformation ensures that the spatial information aligns accurately with the rover’s onboard systems, enabling seamless integration between detection and navigation.
E. Pathfinding
The transformed crater data is passed to the Pathfinding component, which calculates a safe and efficient navigation route for the rover. This component uses advanced pathfinding algorithms, such as the A* algorithm, to avoid craters and other hazards while optimizing the path for time and energy efficiency. The algorithm dynamically adapts to terrain features, incorporating gradient and obstacle data to identify feasible routes.
F. Path Interpolation
To refine the output of the pathfinding process, the Path Interpolation component generates a smooth, continuous path with evenly spaced waypoints. This refinement ensures that the planned path is practical for the rover to follow, reducing mechanical stress and optimizing energy consumption. The interpolated path is the final output of this module and serves as the input for the rover’s navigation system.
G. Navigation and User Interface (UI)
The Navigation and UI module manages the rover’s navigation and provides real-time interaction capabilities through a user-friendly interface.
H. Rover Navigation Module
The Rover Navigation Module receives the interpolated path from the Lunar Crater Navigation System and executes the navigation commands to guide the rover. This module ensures that the rover adheres to the planned route, dynamically avoiding hazards and adjusting to unforeseen terrain challenges. It acts as the link between the computational aspects of the system and the physical movement of the rover.
I. Web UI (Cesium Backend)
The Web UI provides users with a visual representation of the rover’s navigation path and status in real time. Built on a Cesium backend, the Web UI renders a 3D map of the lunar terrain, displaying the detected craters and the interpolated navigation path. This interactive interface allows users to monitor the rover’s progress and issue commands, such as starting, stopping, or modifying the planned route. These commands are relayed to the Rover Navigation Module for execution, enabling real-time control and flexibility in the navigation process.
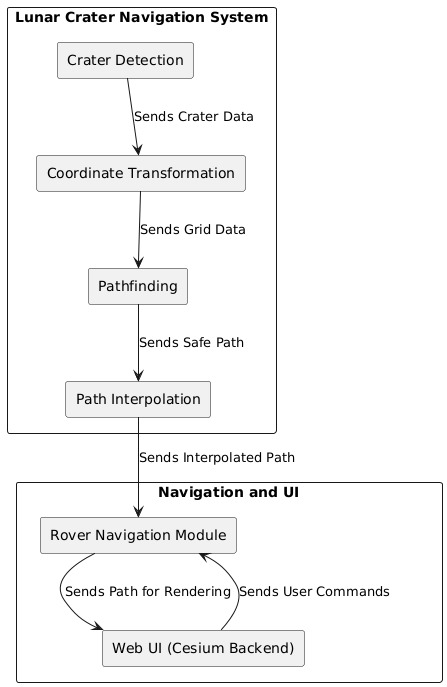
Fig1. System Design
V. EXPERIMENTAL RESULTS
The use of YOLOv8 for lunar crater detection and localization has resulted in impressive performance in identifying craters across the lunar surface. With key metrics including precision of 0.7940, recall of 0.8057, mAP@0.5 of 0.8928, and mAP@0.5:0.95 of 0.5404, the model demonstrates strong performance in accurately detecting lunar craters, showcasing its potential for real-world applications in lunar exploration.
By leveraging YOLOv8, a state-of-the-art object detection model, the crater detection system benefits from its ability to efficiently detect and localize craters at multiple scales. The model’s high precision and recall values indicate its effectiveness in minimizing false positives and false negatives, ensuring that the identified craters are accurate and relevant to the navigation system. The mAP@0.5 value of 0.8928 highlights the model’s high mean average precision, reflecting its strong ability to correctly identify craters across different confidence thresholds.
The achieved recall of 0.8057 further indicates that the model effectively detects a high percentage of actual craters present in the lunar terrain. Additionally, the mAP@0.5:0.95 value of 0.5404 suggests that the model performs well even when considering stricter intersection over union (IoU) thresholds, ensuring that the detected craters are well localized and of high relevance to pathfinding and navigation tasks.
This outcome underscores the effectiveness of YOLOv8 in crater detection and localization, making it a valuable tool for rover navigation in lunar missions. The integration of YOLOv8 provides a reliable and robust method for identifying hazards such as craters, which is critical for ensuring safe and efficient rover movement on the lunar surface.
Overall, the model's performance represents a significant advancement in crater detection for lunar navigation systems. These results demonstrate the model’s potential for contributing to autonomous lunar exploration, providing crucial input for pathfinding and the generation of safe routes for rovers exploring the lunar surface.
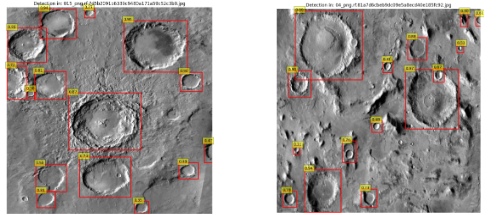
Fig 2: Detection of Craters
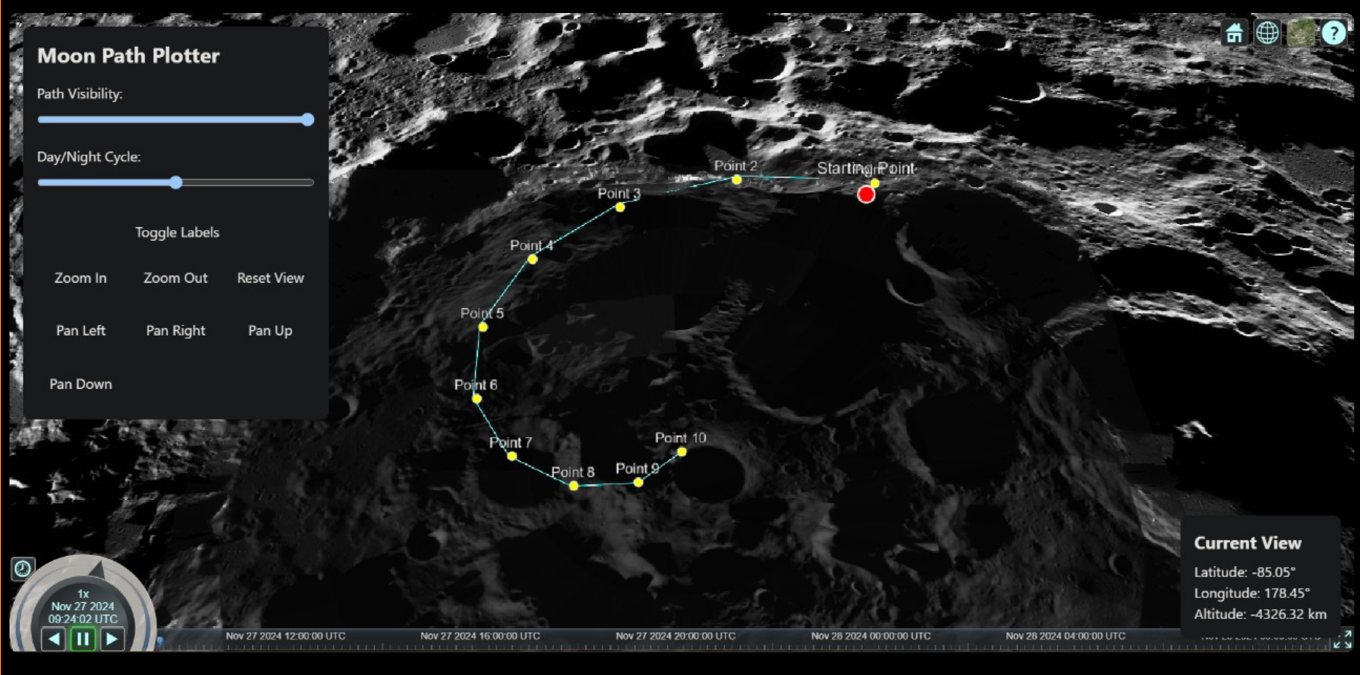
Fig 3: Navigation Route
Conclusion
The strategic navigation system developed for lunar rover missions utilizes Chandrayaan-2’s optical and topographic datasets to ensure safe and efficient traversal of the Moon’s challenging south pole terrain. By optimizing the path to navigate between sunlit and shadowed regions, this system not only extends the operational lifespan of the rover but also significantly enhances the scientific potential of the mission. The routes are designed to minimize hazards such as craters while incorporating scientifically important stops, maximizing the rover’s ability to explore and contribute valuable data on the lunar south pole\'s unique environment, particularly regarding the presence of water ice and other volatiles. The study demonstrated that DEMs generated using the FAN combination of TMC-2 images yielded superior accuracy compared to other methods. These DEMs closely matched reference DEMs and were highly effective for detailed lunar terrain studies. However, while the FAN combination produces shorter image strips due to overlap between stereo images, the overall quality justifies its use. Future work may focus on refining the DEM generation process, addressing data gaps in polar regions, and incorporating additional data sources, such as non-optical references like LOLA, to improve the overall analysis. This research highlights the potential of advanced crater detection, topographic analysis, and pathfinding algorithms to facilitate safe and scientifically meaningful lunar exploration. By effectively combining these methodologies, the proposed system provides a solid foundation for future lunar exploration missions, offering a pathway to understanding the Moon’s unique surface features and resources. Future research will build on the current findings by focusing on several key areas to improve the system\'s robustness and functionality. One important direction will be the development of standardized benchmark datasets and evaluation metrics to ensure consistency in crater detection across different studies and missions. Additionally, efforts will be directed toward improving the algorithms to handle a wider variety of crater sizes and overlapping scenarios, making them more versatile and accurate for real-world conditions. Another promising avenue is exploring multimodal approaches that integrate various data types, such as visual, topographic, and spectral data, to create a more comprehensive understanding of lunar terrain. The adoption of unsupervised and semi-supervised learning techniques will also be explored, reducing reliance on large annotated datasets and enabling the development of more scalable models for future missions. Furthermore, enhancing the interpretability of machine learning models will be a priority, allowing for greater transparency and providing insights into the key features that drive crater detection and pathfinding. To further improve navigation capabilities, future work will focus on incorporating 3D terrain data to refine pathfinding algorithms, enabling navigation in three-dimensional space. Path interpolation will also be optimized, particularly to address the specific mobility constraints of the rover. Finally, the objective of maximizing scientific discovery will be pursued by designing routes that increase the number of scientifically valuable stops along the rover’s path, allowing for more in-depth exploration of the lunar surface.
References
[1] Prabhakar Alok Verma, et-al.: “Lunar surface temperature estimation and thermal emission correction using Chandrayaan-2 imaging infrared spectrometer data for H2O & OH detection using 3 m hydration feature”, Icarus, vol. 383, p. 115075, May 2022, https://doi.org/10.1016/j.icarus.2022.115075. [2] Subhadyouti Bose, et-al.: Photometric correction of images obtained from Chandrayaan-2 Imaging Infra-Red Spectrometer (IIRS) data”, Advances in Space Research, vol. 73, issue 5, 2024, pp. 2720-2752, Dec. 2023, https://www.sciencedirect.com/science/article/abs/pii/S0273117723009754. [3] A.K. Dagar, et-al.: “Analysis of boulders population around a young crater using very high resolution image of Orbiter High Resolution Camera (OHRC) on board Chandrayaan-2 mission”, Icarus, vol. 386, 2022, p. 115168, July 2022, https://doi.org/10.1016/j.icarus.2022.115168. [4] Wenwen Wang, et-al.: “Character and spatial distribution of mineralogy at the lunar south polar region”, Planetary and Space Science, vol. 240, 2024, p. 105833, Dec. 2023, https://doi.org/10.1016/j.pss.2023.105833. [5] Baharul Islam, et-al.: “Lunar DEM and Orthoimage Generation from TMC-2 Stereo Data and Their Quality Assessment”, J Indian Soc Remote Sens 51, 1187–1196 (2023), Nov. 2022, https://doi.org/10.1007/s12524-023-01695-z. [6] Ishan Rayal, et-al.: “Python-Based Open-Source Tool for Automating Seleno-Referencing of Chandrayaan-2 Hyper-Spectral Data Cubes”, J Indian Soc Remote Sens 52, 305–313 (2024), July 2023, https://doi.org/10.1007/s12524-024-01814-42. [7] Mimansa Sinha, et-al.: “Automated Lunar Crater Identifcation with Chandrayaan-2 TMC-2 Images using Deep Convolutional Neural Networks”, Sci Rep 14, 8231 (2024), Apr. 2024, https://doi.org/10.1038/s41598-024-58438-4. [8] Yifan Zhang, et-al.: “Analysis of Illumination Conditions in the Lunar South Polar Region Using Multi-Temporal High-Resolution Orbital Images”, Remote Sensing 15, no. 24: 5691, Dec. 2023, https://doi.org/10.3390/rs15245691. [9] Arpita Baronia, et-al.: “Crater Detection on Moon Surface”, Dec. 2019, https://www.researchgate.net/publication/364081520. [10] Zhonghua Hong, et-al.: “Improved A-Star Algorithm for Long-Distance Off-Road Path Planning Using Terrain Data Map”, ISPRS International Journal of Geo-Information. 2021; 10(11):785, Nov. 2021, https://doi.org/10.3390/ijgi10110785. [11] Xiaoqiang Yu, et-al.: “Learning-Based End-to-End Path Planning for Lunar Rovers with Safety Constraints”, Sensors, Vol. 2, Issue 3, Jan. 2021, https://doi.org/10.3390/s21030796. [12] Sudong Zang, et-al.: “Semi-Supervised Deep Learning for Lunar Crater Detection Using CE-2 DOM”, Remote Sensing, Vol. 13, Issue 14, 2021; 13(14):2819, July 2021, https://doi.org/10.3390/rs13142819. [13] ] Roboflow Dataset, https://universe.roboflow.com/crater-zqpjg/crater-vrqmn/dataset/1/images/00ac3593d65082298374e841fa0879cf. [14] TMC-2 Dataset, https://pradan.issdc.gov.in/ch2/protected/browse.xhtml?id=tmc2. [15] YOLOv8, https://docs.ultralytics.com/models/yolov8/. [16] Detailed Explanation of YOLOv8 Architecture,https://medium.com/@juanpedro.bc22/detailed-explanation-of-yolov8-architecture- part-1-6da9296b954e. [17] Lunar Catalog, https://www.lpi.usra.edu/resources/mapcatalog/. [18] Lunar Sample Atlas, https://www.lpi.usra.edu/lunar/samples/atlas/. [19] Lili Fan, et-al.: “ELCD: Efficient Lunar Crater Detection Based on Attention Mechanisms and Multiscale Feature Fusion Networks from Digital Elevation Models”, Remote Sensing, Vol. 14, Issue 20, 2022; 14(20):5225, Oct. 2022, https://doi.org/10.3390/rs14205225. [20] Ke Zhu, et-al.: “GRAIL gravity gradients evidence for a potential lava tube at Marius Hills on the moon”, Icarus, Volume 408, 2024, p. 115814, Sept. 2023, https://doi.org/10.1016/j.icarus.2023.115814.
Copyright
Copyright © 2025 Arjit Bhardwaj, Abbas Hozefa, Arsh Gupta, Ayush Singh, Dr. D. R. Ramesh Babu. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET66640
Publish Date : 2025-01-22
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online