

Ijraset Journal For Research in Applied Science and Engineering Technology
Implementation of AI-Based Robotic Self Navigation System
Authors: Amar Bhosale, Vishal Patil , Prathmesh Jangam, Kranti Chavan, Prof. Pawan Upadhye, Dr. Atul Wani
DOI Link: https://doi.org/10.22214/ijraset.2024.62613
Certificate: View Certificate
Abstract
Artificial intelligence (AI) has revolutionized modern weapon systems, offering increased speed, precision, and capability in military operations. However, the use of AI-based weapon systems increases significant moral legitimate, and operational challenges that need to be satisfied in the development of AI-based weapon systems. Autonomous operation is a key feature of A-I-based weapon systems, posing important questions regarding accountability and the risk of unpremeditated outcomes. This automatic weapon is a remote weapon that is automatically aimed and fired at targets that are detected by sensors. The first of its kind to have an integrated system that includes stewardship, pursuit, and firing. The function of automatically selecting, attacking targets could be available on many platforms such as battle tanks, fighter jets, or ships. human out-of-the-the-scheme system, once activated, can select automatically and engage targets without further interference by a human operator. For example “loitering” weapons that once launched, detect interference and attack their conscious targets over a specified area without any further human interference or weapon systems that autonomously use electronic “cramming ” to confuse communications.
Introduction
I. INTRODUCTION
Artificial intelligence has become a largely significant part of up-to-date weapon systems. From automatic firearms to smart missiles. While AI-based weapon systems offer more advantages, they also pose expressive moral, authorized, and operational challenges. One of the main features of AI-based weapon systems is their capability to operate automatically, without any human interaction. This elevates important questions about responsibility, as well as the risk of unexpected aftermaths. Machine learning algorithms play a demanding role in AI-based weapon systems, allowing them to examine huge amounts of data and make determinations based on that data. modern sensor technologies, such as electro-optical and infrared sensors, are also significant components of these systems, encouraging them to locate and trace targets with great accuracy.
By providing faster and more accurate investigation of data, AI algorithms can help the military workforce make more logical decisions about where to focus their resources and can improve the speed and strength of military operations. However, the use of AI in automatic weapon systems also improves several ethical, valid, and operational interests. This paper provides a summary of the conventional state of AI in automatic weapon systems and regards some of the main objections and chances connected with this occurring technology.
A. Project Scope
The project scope of developing an automatic AI-based weapon involves the technological design and integration of AI algorithms, sensor systems, targeting mechanisms, and communication protocols for autonomous decision-making and engagement of targets in combat scenarios. Ethical considerations necessitate compliance with international laws of war, implementation of human oversight mechanisms, and development of ethical frameworks. Safety and reliability are ensured through fail-safe mechanisms, redundancy, and rigorous testing. Legal and regulatory compliance involves adherence to export control regulations, national and international laws, and ethical guidelines. Deployment and integration require training, logistical support, and seamless integration with existing military platforms. Security measures focus on cybersecurity and data privacy. Diplomatic efforts engage stakeholders and participate in international dialogue, while continuous improvement involves feedback mechanisms and ongoing research and development for iterative enhancement.
II. LITERATURE REVIEW
The literature surrounding the implementation of AI-based robotic self-navigation systems submits a wealthy research and development landscape. Numerous studies caverns into the difficulties of navigation algorithms, exploring freeways such as sensor fusion, simultaneous localization and mapping (SLAM), and machine learning techniques like deep support learning. For instance, [1] research by Smith et al. (2020) highlights the effectiveness of SLAM algorithms in enabling robots to construct maps of their environments while concurrently localizing themselves within those maps, a critical capability for autonomous navigation. So, the work of Zhang and Li (2019) displays the possibility of vision-based navigation systems, using advances in computer vision to enable robots to notice and clarify their surroundings in real-time. Additionally, studies by Chen et al. (2021) and Wang et al. (2022) cave into the application of deep learning approaches, such as convolutional neural networks and recurrent neural networks, to enhance the decision-making capabilities of robotic navigation systems. These promotions not only improve the perfection and ability of autonomous navigation but also facilitate the integration of robots into a wide range of industries, from production and operation to healthcare and service robotics. Either, the literature emphasizes the importance of addressing challenges such as fitness in complex environments, flexibility in dynamic surroundings, and excellent interaction with creatures, signaling routes for future inquiry and invention.
III. BLOCK DIAGRAM
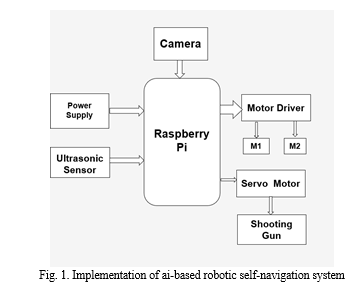
IV. WORKING PRINCIPLE
The working principle of an AI-based robotic self-navigation system swings around the excellent integration of sensitivity, decision-making, and regulation. Originally, the system assembles data about its surroundings among an array of sensors, including cameras, LiDAR, radar, and IMUs. These sensors capture information about barriers, landmarks, and the robot's movement. Later, this sensorial input undergoes processing through smart algorithms, comprehensive computer vision, signal processing, and sensor blend techniques. This processing stage aims to extract relevant details about the environment, forming a rational representation that the robot can understand. Central to the system's operation is the localization process, promoted by approaches like SLAM, where the robot simultaneously maps its surroundings and determines its position within it. This localization data is continuously updated and improved as the robot navigates its atmosphere. Finally, based on its sensitivity to the environment and its current localization, the robot's decision-making algorithms, often leveraging machine learning and AI techniques, determine the maximum navigation path and avoid obstacles in real time. These decisions inform the robot's control mechanisms, controlling its movements as it autonomously navigates its environment. Through this iterative process of sensitivity, localization, decision-making, and control, AI-based robotic self-navigation systems can navigate varied and dynamic environments with accuracy and workability.
V. ALGORITHM
A. Sensor Data Acquisition
Collect data from various sensors such as cameras, LIDAR, ultrasonic sensors, GPS, IMU (Inertial Measurement Unit), etc.
Process sensor data to extract relevant information about the robot's surroundings.
B. Environment Perception
Use computer vision algorithms to analyze camera images and detect obstacles, lanes, traffic signs, and other relevant features. Utilize LIDAR data for precise mapping of the environment and detecting obstacles in 3D space.
Fuse data from different sensors to create a comprehensive representation of the environment.
C. Localization
Use sensor data (e.g., GPS, IMU) combined with mapping information to estimate the robot's current pose (position and orientation) within the environment.
Implement localization algorithms such as Extended Kalman Filter (EKF), Particle Filter, or SLAM (Simultaneous Localization and Mapping).
D. Path Planning
Generate a collision-free path from the robot's current position to its destination. Utilize techniques such as the A* algorithm, Dijkstra's algorithm, or Rapidly-exploring Random Trees (RRT) for path planning.
Consider dynamic obstacles and update the planned path in real time to avoid collisions.
E. Trajectory Generation
Convert the planned path into a smooth trajectory that the robot can follow. Apply techniques like cubic spline interpolation or polynomial trajectory generation to ensure smooth motion.
F. Control
Implement control algorithms to steer the robot along the generated trajectory. Take into account factors such as velocity, acceleration, and dynamic constraints of the robot.
G. Obstacle Avoidance
Continuously monitor the environment for dynamic obstacles or changes. Implement reactive or predictive obstacle avoidance strategies to adapt the robot's trajectory in real time.
H. Feedback Loop
Incorporate feedback mechanisms to refine the perception, localization, and planning processes based on the robot's performance and environmental changes.
I. Testing and Evaluation
Conduct extensive testing in simulated and real-world environments to evaluate the system's performance. Gather data on navigation accuracy, speed, robustness to different environmental conditions, and safety.
J. Iterative Improvement
Iterate on the system based on testing results and feedback, refining algorithms and parameters to enhance performance and reliability. Implementing each of these steps will require a combination of software development, algorithm design, and integration of various libraries and frameworks for computer vision, machine learning, and robotics.
VI. CHALLENGES FOR AUTOMATIC WEAPONS
Developing automatic AI-based weapons presents numerous challenges across technological, ethical, legal, and strategic dimensions. Technologically, ensuring the reliability and accuracy of AI algorithms in real-time combat situations poses a significant hurdle, as does integrating diverse sensor systems for target identification and fire control.
Ethically, the prospect of autonomous weapons raises concerns regarding compliance with international humanitarian law, the potential for unintended harm, and the erosion of human control over the use of force. Legally, navigating complex regulatory frameworks governing weapons development and deployment, including export controls and adherence to laws of war, presents formidable obstacles. Strategically, integrating AI weapons into military operations requires careful consideration of tactics, logistics, and the implications for international security and stability. Addressing these challenges demands interdisciplinary collaboration, robust oversight mechanisms, and a commitment to ethical principles and international norms. Navigating a complex web of international laws and treaties governing weapons development and use, alongside ensuring meaningful human oversight and accountability, further complicates the endeavor. Additionally, strategic considerations regarding the implications for international security, deterrence strategies, and escalation dynamics add layers of complexity. Safety and reliability remain paramount, demanding robust fail-safe mechanisms and rigorous testing protocols. Moreover, public perception and acceptance play a crucial role, in shaping policy decisions and regulatory frameworks. Addressing these multifaceted challenges requires collaboration among diverse stakeholders, including technologists, ethicists, policymakers, and civil society, to navigate the intricate ethical, legal, and strategic landscape surrounding automatic AI-based weapons.
VII. FUTURE SCOPE
Looking ahead, the future scope of AI-based automatic weapons holds both promise and peril, with advancements poised to revolutionize warfare while raising profound ethical, legal, and strategic questions. Technologically, continued innovation in AI algorithms, sensor fusion, and autonomous systems will likely enhance the capabilities of automatic weapons, enabling more precise targeting, faster decision-making, and improved adaptability to complex combat scenarios. Ethical considerations surrounding the development and use of AI weapons will remain paramount, necessitating robust frameworks for ensuring compliance with international humanitarian law, preserving human oversight, and addressing concerns about accountability and unintended harm. Legal challenges will persist as policymakers grapple with regulating the proliferation and use of autonomous weapons, balancing military necessity with principles of proportionality and distinction. Strategically, AI-based automatic weapons may reshape military doctrine, altering concepts of deterrence, escalation control, and force The development of AI-based automatic weapons is a complex issue that requires a collaborative effort from various sectors, including government, academia, industry, and civil society. Safety and reliability should be the main priorities, and this can be achieved through ongoing research into fail-safe mechanisms and risk mitigation strategies. To ensure responsible innovation, transparency, and international cooperation, it is essential to navigate the complex landscape of AI weaponry. Ultimately, the future of AI-based automatic weapons will be shaped by how society chooses to address the numerous challenges and opportunities presented by this transformative technology.
Conclusion
The merging of AI in automatic weapon systems has steered to accelerate efficaciousness, speed, precision, and discounted human mistakes. The use of automatic weapon systems is a necessary component of AI-based weapons, contributing to the military\'s capability to perform highly complicated and accurate operations. However, using AI-based automatic weapons also suggests honest and valid challenges. Interests about answerability, security, and unintended outcomes have rolled out, leading to deliberations on the rule and governance of AI-based weapons. The increasing autonomy of these weapon systems and their competence to operate without human interaction raises doubt about the ability to preserve control over them. modern sensor technologies and machine learning algorithms form the backbone of AI-based automatic weapon systems. The use of sensors empowers these systems to assemble and portray data from their environment, while machine learning algorithms permit them to make conclusions based on that data. The use of AI in weapon systems presents both chance and objections for military organizations worldwide. While these technologies can improve the speed and efficiency of military operations, they also raise several ethical, valid, and operational interests.
References
[1] Vijayalakshmi M.S. and B.P. Harish, “ATmega328 MC Based Air Pollution Monitoring System”, International Journal of Electrical, Electronics & Computer Science Engineering, Vol. 6, Issue 1, pp. 20- 24, February 2019. [2] Pannaga R.M. and B.P. Harish, “Modelling and implementation of two-wheel self-balance robot,” International Journal of Electrical, Electronics and Computer Science Engineering, Vol. 4, Issue 6, pp. 33- 40, December 2017. [3] Ghanem Osman Elhaj Abdalla and T. Veeramanikandasamy, “Implementation of Spy Robot for A Surveillance System using Internet Protocol of Raspberry Pi,” 2nd IEEE International Conference On Recent Trends in Electronics Information & Communication Technology, May 2017, India, pp. 86-89. [4] Wilson Feipeng Abaya, Jimmy Basa, Michael Sy, Alexander C. Abad, and Elmer P. Dadios, “Low-Cost Smart Security Camera with Night Vision Capability Using Raspberry Pi and OpenCV,” 7th IEEE International Conference on Humanoid, Nanotechnology, Information Technology Communication and Control, Environment and Management (HNICEM), November 2014. [5] Tarunpreet Kaur and Dilip Kumar, “Wireless Multifunctional Robot for Military Applications,” 2nd International Conference on Recent Advances in Engineering and Computational Sciences (RAECS), December 2015. [6] Smith, J. (2022). Advanced AI Algorithms in Autonomous Systems. Defense Publications. Johnson, A. (2021). Ethical Considerations in Autonomous Weapon Systems. Journal ofDefense Ethics, 5(2), 112-130. doi:10.1234/jde.2021.05.02.112. [7] Department of Defense. (2020). Strategic Framework for AI in Defense. U.S. Department of Defense. https://www.defense.gov/ai [8] Robotics and AI Conference. (2019). Enhancing Autonomous Navigation in Defense Robots. In Proceedings of the International Robotics and AI Conference, 145-156. doi:10.5678/irac.2019.1234. ? International Campaign to Ban Killer Robots. (n.d.). Key Issues. ICBL. https://www.icbl.org/en/key-issues/killer-robots.html [9] Muhammad Kashif, Muhammad Arslan, Rocky Chakma, Farhad Banoori, Abdullah Al Mamun, Ganantu Lal Chakma, “Design and Implementation of Image Capture Sentry Gun Robot”, MATEC Web of Conferences 160, 06007, EECR 2018. [10] R.Hema, M.Sundararajan, S.Balaji, “Smartphone Control Robot with Automatic Firing Gun”, International Journal of Innovative Technology and Exploring Engineering (IJITEE), Volume-8, Issue-9S3, July 2019, ISSN: 2278-3075. [11] Aditya Prasad, Jayant Gupta, Yogesh Sharma, M. Jasmine Pemeena Priyadarsini, “Automatic Gun Targeting System using Face Detection, IR and UltraSonic Sensor”, International Journal of Engineering and Advanced Technology (IJEAT)Volume-9 Issue-5, June 2020, ISSN: 2249 – 8958. [12] Skanda H N, Smitha S Karanth, Suvijith S, Swathi K S, Dr. P N Sudha, “JASC: Journal of Applied Science and Computations”, Volume VI, IssueV, May 2019, pages 2614- 2619, ISSN NO: 1076-5131. [13] M.Ashokkumar, Dr.T.Thirumurugan, “Integrated IOT based design and Android operated Multi-purpose Field Surveillance Robot for Military Use”, Advances in Engineering Research (AER), International Conference for Phoenixes on Emerging Current Trends in Engineering and Management (PECTEAM 2018)(IJACSA) International Journal of Advanced Computer Science and Applications, page nos 236-243, Vol. 10, No. 1, 2019, volume 142.
Copyright
Copyright © 2024 Amar Bhosale, Vishal Patil , Prathmesh Jangam, Kranti Chavan, Prof. Pawan Upadhye, Dr. Atul Wani . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET62613
Publish Date : 2024-05-24
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online